Изобретение относится к машиностроению и приборостроению и предназначено для бесконтактного подвешивания роторов при помощи электромагнитных подшипников. Цель изобретения - повышение несущей способности и жесткости подшипника путем увеличения управляющего усилия. На чертеже изображена схема пред лягаемого радиального электромагнитного подшипника. Устройство состоит из ферромагни ного ротора 1, подвешенного внутри кольцевого статора 2 с восемью полю сами 3- 10, обмотками 11-18 управ ления по оси У и обмотками 19 - 26 управления по оси X. Конец обмотки 18 соединен с нача лом обмотки 11, конец которой соеди нен с началом обмотки 12, конец кот рой .oeдинeн с началом обмотки 13, конец которой соединен с концом обмотки 14, начало которой соединено с концом обмотки 15, начало которой соединено с концом обмотки 16, нача ло которой соединено с концом обмот ки 17. Конец обмотки 24 соединен с началом обмотки 25, конец, которой с динен с началом обмотки 26, конец которой соединен с началом обмотки 19, конец которой соединен с концом обмотки 20, начало которой соединено с концом обмотки 22, начало кото рой соединено с концом обмотки 23. Начала обмоток 17 и 18 запитьгоаются током, величина которого зависит от положения.ротора по координате У Начала обмоток 23 и 24 запитываются током, величина которого зависит от положе;;ия ротора по координате X. На каждом из полюсов находятся также обмотки подмагничивания, пита емые постоянным током и создаюБ ие постоянные магнитные потоки подмагничивания, направления которых в полюсах 3,6,7,10 противоположно направлению их в полюсах 4,5,8,9 (на чертеже не показаны). Действие предлагаемого устройства основано на явлении частичного растекания магнитного потока, инду.цирозанного током в обмотке какоголибо полюса. Наличие дополнительных обмоток управления позволяет полностью избавиться от действия дестабилизирующей силы. Устройство работает следующим образом. По координате У ротор 1 удерживается управляющей силой, равной разности суммарной силы, создаваемой полюсами 3,4,5,10 и суммарной силы полюсов 6,7,8,9. Управляющая сила по координате X равна разности суммарной силы полюсов 4,5,6,7 и суммарной силы полюсов 8,9,10,3. Например, при смещении ротора 1 вниз магнитные потоки подмагничивания и управления под полюсами 3,4,5,10 статора 2 складываются, а под полюсами 6,7,8,9 вычитаются. Возникающая при этом результирующая управляющая сила направлена вверх и возвращает ротор в центральное положение. Таким образом,для получения управляющего усилия по каждой координате используют все полюса статора,при этом дестабилизирующее усилие по каждой координате исключается. При смещении ротора по оси У в полюсах 5,6,9,10 потока управления не возникает, но вредное действие потоков подмагничивания компенсируется } появляющимися при У-смещении ротора добавочными потокамиfjCi 5,6,9,10). В полюсах 5 и 10 потоки и потоки подмагничивания вычитаются, а в полюсах 6 и 9 - складываются, что определяет компенсацию дестабилизирующей сипы. Аналогичные процессы происходят в полюсах 1,7,8,3 при смещении ротора вдоль оси X. При одновременном смещении ротора по осям X и У магнитные потоки управленияФ и добавочные потоки Ф. появляются по всех полюсах, Воз1никающее распределение суммарных магнитньгх потоков по Полюсам магнитопровода подшипника в этом случае является более сложным,и для выявления эффекта компенсации дестабилизирующей силы существенны не только направления, но и значения потоков Ф-, , Фу и Ф. Расчеты суммарной возвращающей силы для всех ннправлений смещения ротора обнаруживают значительное увеличение суммарной возвращг.ютейсилы.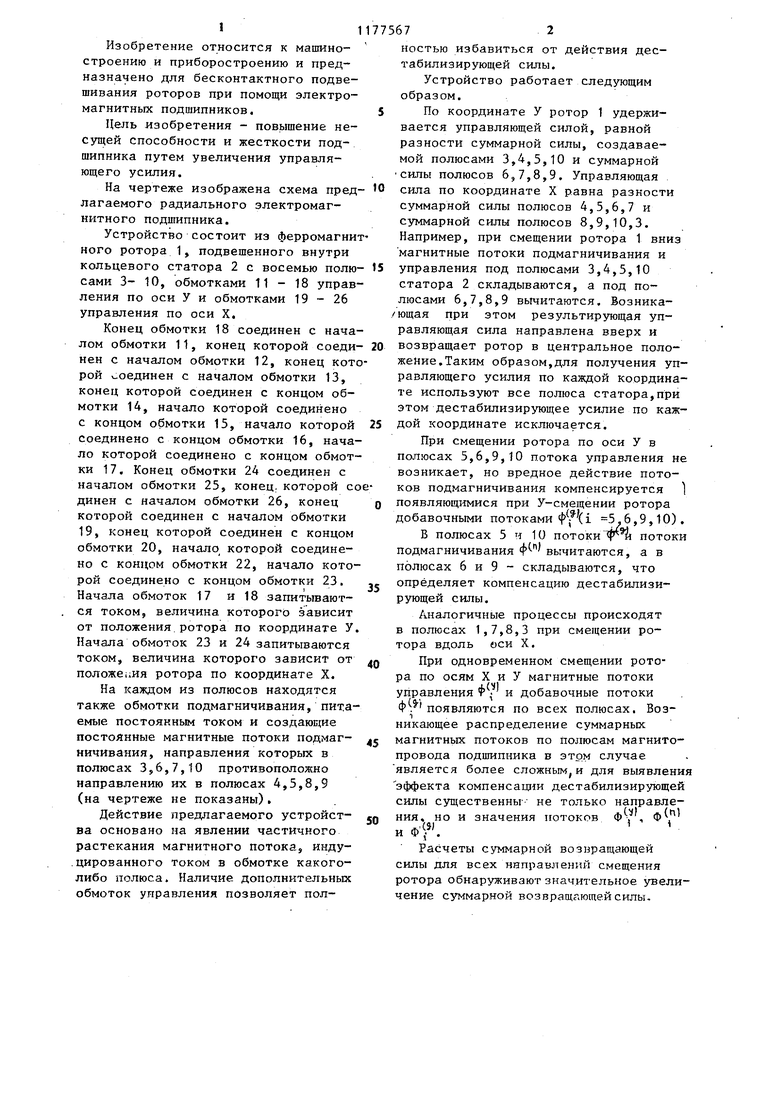
| название | год | авторы | номер документа |
|---|---|---|---|
| Радиальная электромагнитная опора для активного магнитного подшипника | 2021 |
|
RU2763352C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОГЕНЕРАТОРОМ | 2013 |
|
RU2537394C1 |
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ МАГНИТНОГО ПОЛЯ | 2014 |
|
RU2587978C2 |
| МОДУЛЬНЫЙ ВЕНТИЛЬНЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ (МВЭП) | 2006 |
|
RU2310966C1 |
| ЭЛЕКТРОМАГНИТНАЯ ОПОРА | 1992 |
|
RU2037684C1 |
| ЭЛЕКТРОННО-КОММУТИРУЕМЫЙ СИНХРОННЫЙ РЕАКТИВНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1995 |
|
RU2198459C2 |
| Синхронная машина | 2021 |
|
RU2759219C1 |
| БЕСКОЛЛЕКТОРНАЯ УНИВЕРСАЛЬНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА БЕЛАШОВА | 1998 |
|
RU2130682C1 |
| СИНХРОННЫЙ ГЕНЕРАТОР С ВОЗБУЖДЕНИЕМ ОТ ПОСТОЯННЫХ МАГНИТОВ, ПРЕИМУЩЕСТВЕННО СВАРОЧНЫЙ | 2005 |
|
RU2305359C2 |
| ПРИБОР ДЛЯ ПРОВЕРКИ МАГНИТНОГО СЦЕПЛЕНИЯ | 2013 |
|
RU2537051C1 |
РАЛИА.ПЬНЫП ЭЛЕКТРОМЛГНИТНЬЙ ПОДШИПНИК, содержащий магнитопроводящий ротор и кольцевой восьмиполюсный статор, каждый полюс которого имеет обмотку подмагничивания и обмотку управления по соответствующе. координате, о т. л и ч а ю щ и и с я тем, что, с целью повышения несущей способности и жесткости путем увеличения управляющего усилия, каждый из полюсов снабжен дополнительной обмоткой управления HQ другой координате. (Л
| Katterloher R.Magnetlager auch in Miischinenbati: Aufbau, Eigenschaften, Anwendungen, - Maschinenmarkt, 1975, vol | |||
| Горный компас | 0 |
|
SU81A1 |
| КАТАЛИЗАТОР ДЛЯ ПОЛУЧЕНИЯ ЖИДКИХ УГЛЕВОДОРОДОВ ИЗ ДИМЕТИЛОВОГО ЭФИРА | 2006 |
|
RU2322294C2 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Разработка системы магнитного подвешивания BpaitawinerocH ротора | |||
| Отсчет по НИР.Л.ЛШГ.КТ | |||
| Гребенчатая передача | 1916 |
|
SU1983A1 |
| per | |||
| № 80055159. | |||
