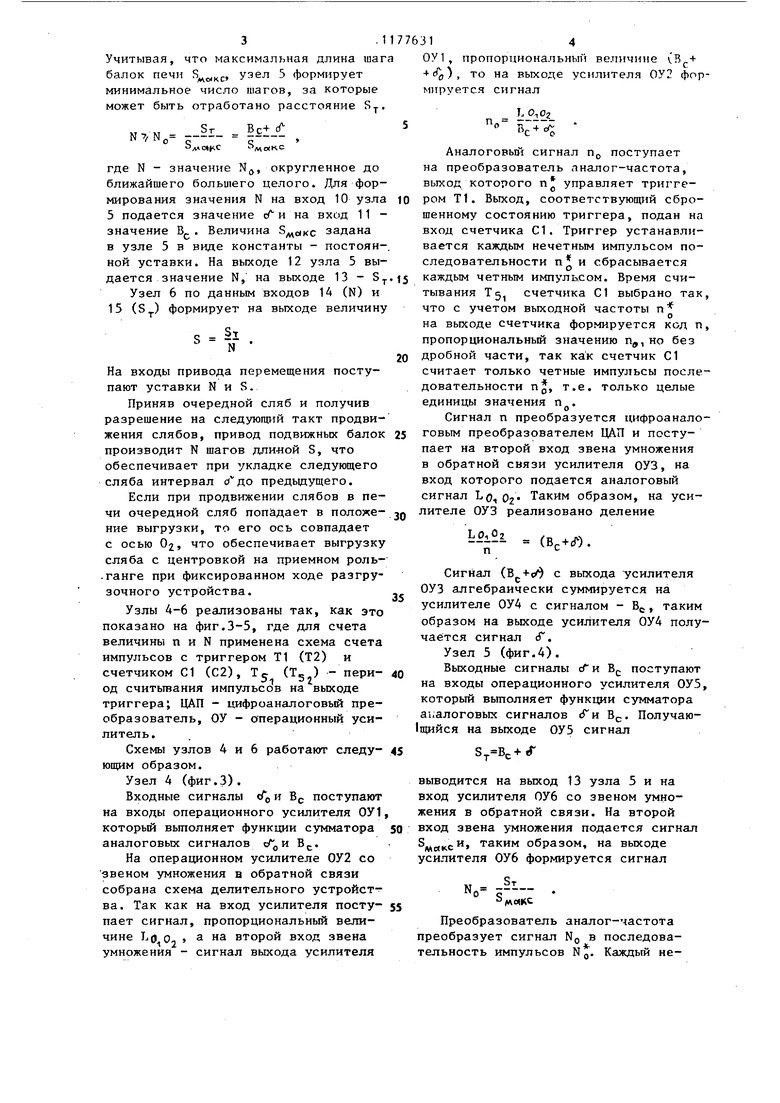
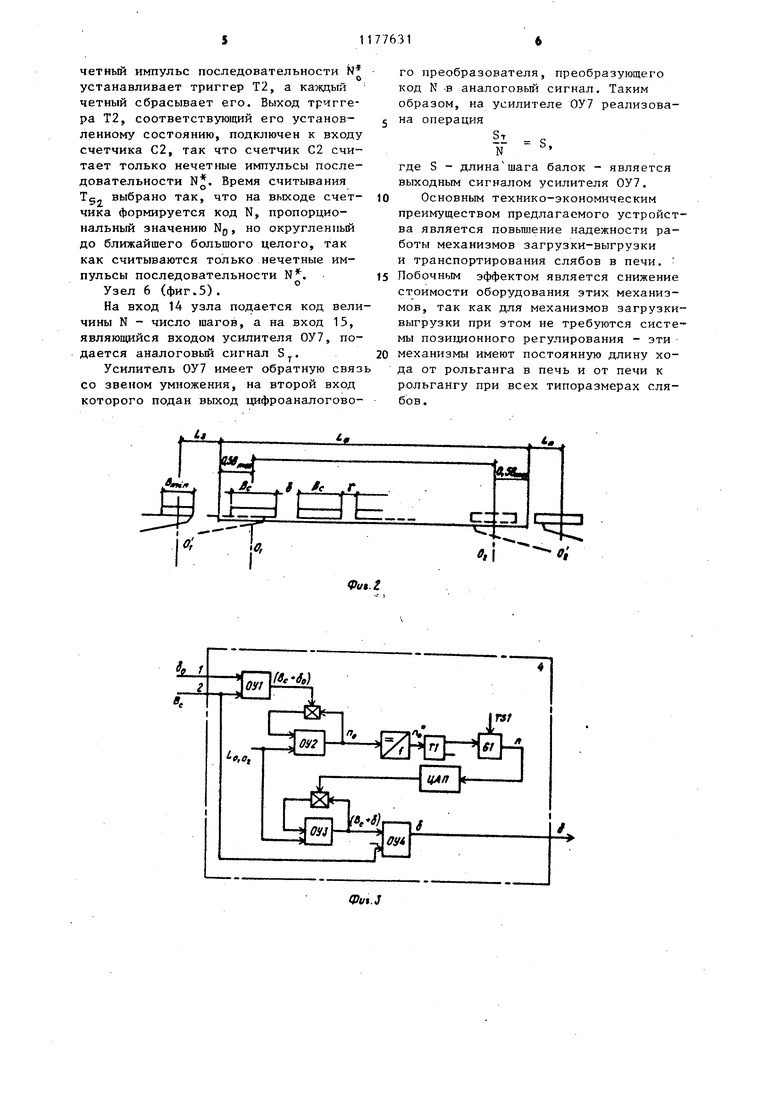
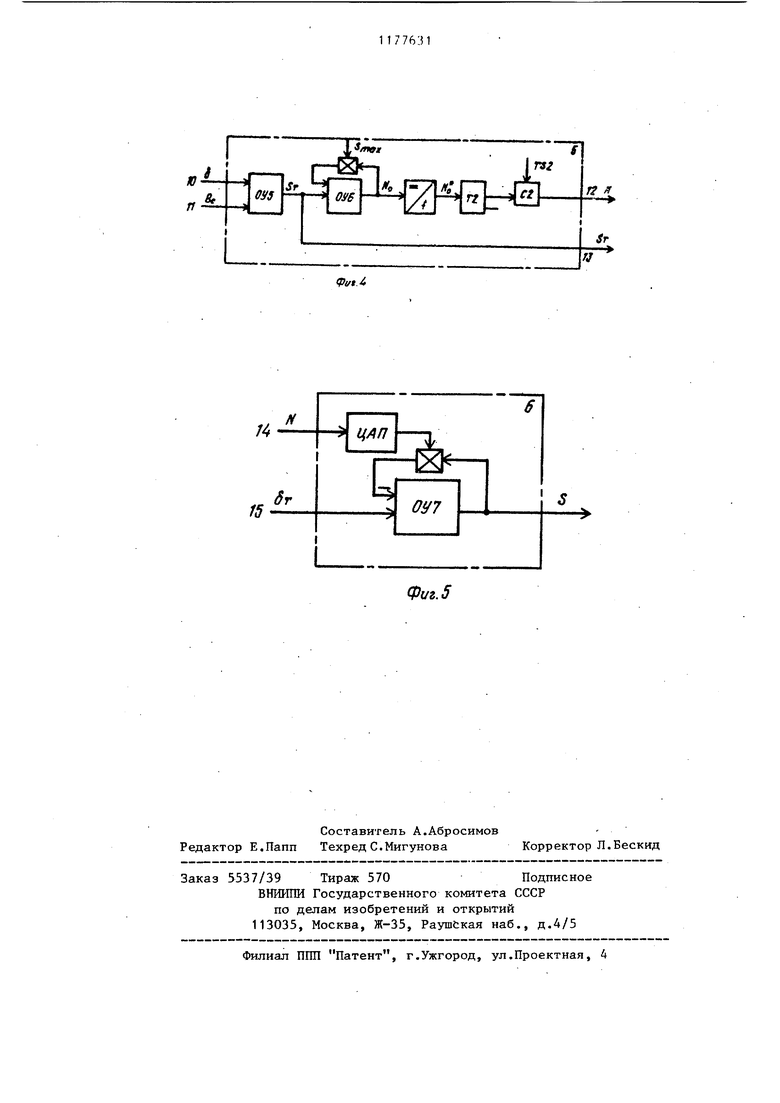
m Изобретение относится к области управления механизмами перемещения заготовок в нагревательных печах и на холодильниках и может быть исполь зовано, в частности, для автоматизации управления загрузкой-разгрузкой и перемещением заготовок в нагревательных печах с шагающими балками. Цель изобретения - повышение надежности работы механизмов загрузки выгрузки и транспортировки слябов в печи с шагающими балками. На фиг.1 приведена блок-схема уст ройства; на фиг.2 - схема, поясняюща работу устройства; на фиг.З - блоксхема узла формирования расчетного интервала между слябами, на фиг.4 блок-схема узла формирования количест ва шагов в такте перемещения слябов на фиг.З - блок-схема узла формирования длины шага подвижных балок. Устройство содержит задатчик 1 желаемого интервала между слябами, задатчик 2 ишрины слябов, блок 3 управления, состоящий из узла U формирования расчетного интервала между слябами. Узла 5 формирования количества шагов в такте перемещения слябов, узла 6 формирования длины ша га подвижных балок, привод 7 перемещения балок, привод 8 загрузочного устройства, привод 9 разгрузочного устройства. К входам узла 4 подключены выходы задатчиков 1 и 2, к входам узла 5 выход задатчика 2 и выход узла 4, к входам узла 6 - выходы узла 5, к входам привода 7 подвижных балок - выход узла 6 и первый выход узла 5. Устройство работает следующим образом (фиг.2). Загрузочное устройство снимает загружаемьш сляб с загрузочного рольганга (ось сляба совпадает с осью О загрузочного рольганга), вно Сит его в печь и укладывает в активной зоне (активной назовем зону, ограниченную торцами подвижных балок в их крайних положениях осью сляба по оси 0). Предполагая, что слябы захватываются подвижными балками без свеса, ось 0. отстоит от края активной зоны на расстоянии 0,5 (кc вглубь печи, где максимальная иирина слябов. Таким образом, длина хода загрузочного устройства всегда постоянна и равна Sj,Lj+0,., где LJ - расстояние от оси О до края активной зоны печи. Транспортировка сляба сквозь печь проводится таким образом, что ось загруженного сляба в положении выгрузки совпадает с осью Oj, отстоящей от края активной зоны на 0,5 B,,,;. При расстоянии L, от края активной зоны до оси о приемного рольганга это обеспечивает перенос сляба на рольганг с центровкой по оси рочьганга при постоянном ходе разгрузочного устройства. р -п- микс При этом заход балок загрузочного и разгрузочного устройств на глубину за ось сляба обеспечивает надежную устойчивость сляба на балках этих устройств. Здесь В - минимальная ширина слябов. . Таким образом, шагающие балки перемещают сляб в печи так, .что его ось проходит путь Цог. L«| В(, где LOI длина активной зоны. При этом на расстоянии LOOJ Укладываются п слябов с п интервалами между ними. Заметим, что в каждой садке печи загружаются слябы одного типоразмера. Устройство получает от задатчиков 1 и 2 желаемьп интервал d между слябами и ширину В загружаемых слябов, которые поступают на вход узла 4. Узел 4 проверяет, сколько слябов ширины Bj. можно уложить на расстоянии С интервалом L0i0z где и - целое значение п, полученное отбрасыванием дробной части, и формирует расчетное значение интервала L 0-1 Ог На выходе узла 4 выдается значение с, L о Oi задано в виде констарты - постоянной уставки в узле 4. За такт перемещения слябов, состоящий из 2-3 шагов и подготавливающий место для загрузки следующего сляба,-данный сляб должен переместиться на расстояние сГ. Учитывая, что максимальная длина шаг балок печи , узел 5 формирует минимальное число шагов, за которые может быть отработано расстояние „,„„. 5l- . йдлмцс ««кс где N - значение N(j, округленное до ближайшего большего целого. Для формирования значения N на вход 10 узла 5 подается значение сЛ и на вход 11 значение В . Величина задана в узле 5 в виде константы - постоянной уставки. На выходе 12 узла 5 выдается значение N, на выходе 13 - S Узел 6 по данным входов 14 (N) и 15 (sp формирует на выходе величину -1 На входы привода перемещения поступают уставки N и S. Приняв очередной сляб и получив разрешение на следующий такт продвижения слябов, привод подвижных балок производит N шагов дли«ой S, что обеспечивает при укладке следующего сляба интервал предыдущего. Если при продвижении слябов в печи очередной сляб попадает в положение выгрузки, то его ось совпадает с осью 02, что обеспечивает выгрузку сляба с центровкой на приемном роль.Ганге при фиксированном ходе разгрузочного устройства. Узлы 4-6 реализованы так, как это показано на фиг.3-5, где для счета величины п и N применена схема счета импульсов с триггером Т1 (Т2) и 5 (TSJ) - перисчетчиком С1 (С2), Т од считьтания импульсов на выходе триггера; ЦАП - цифроаналоговый преобразователь, ОУ - операционный усилитель. Схемы узлов 4 и 6 работают следующим образом. Узел 4 (фиг.З). Входные сигналы сГ и В поступают на входы операционного усилителя ОУ1 который вьтолняет функции сумматора аналоговых сигналов сАд и В. На операционном усилителе ОУ2 со звеном умножения в обратной связи собрана схема делительного устройства. Так как на вход усилителя поступает сигнал, пропорциональный величине LO О, 3 на второй вход звена умножения - сигнал выхода усилителя пропорциональный величине vB + + ), то на вькоде усилителя ОУ2 форси гнал мируется Аналоговьп сигнал п поступает на преобразователь пналог-частота, выход которого п управляет триггером Т1. Выход, соответствующий сброшенному состоянию триггера, подан на вход счетчика С1. Триггер устанавливается каждым нечетным импульсом последовательности п и сбрасывается каждым четным импульсом. Время считывания Т5, счетчика С1 выбрано так, что с учетом выходной частоты п о на выходе счетчика формируется код п, пропорциональный значению п,, но без дробной части, так как счетчик С1 считает только четные импульсы последовательности п, т.е. только целые единицы значения п . Сигнал п преобразуется цифроаналоговым преобразователем ЦАП и поступает на второй вход звена умножения в обратной связи усилителя ОУЗ, на вход которого подается аналоговый сигнал LO, Oz Таким образом, на усилителе ОУЗ реализовано деление (Вс+Л. Сигнал (В +е/) с выхода усилителя ОУЗ алгебраически суммируется на усилителе ОУ4 с сигналом - В, таким образом на выходе усилителя ОУ4 получается сигнал сГ. Узел 5 (фиг.4). Выходные сигналы tfnE поступают на входы операционного усилителя ОУ5, который вьтолняет функции сумматора аналоговых сигналов сГи Bj-. Получающийся на выходе ОУ5 сигнал s Bc+«r выводится на выход 13 узла 5 и на вход усилителя ОУ6 со звеном умноения в обратной связи. На второй ход звена умножения подается сигнал MrtKC таким образом, на выходе силителя ОУб формируется сигнал Преобразователь аналог-частота реобразует сигнал NQ в последоваельность импульсов N. Каждый нечетный импульс последовательности N устанавливает триггер Т2, а каждый четный сбрасывает его. Выход триггера Т2, соответствующий его установленному состоянию, подключен к входу счетчика С2, так что счетчик С2 считает только нечетные импульсы последовательности N. Время считывания Тс выбрано так, что на выходе счет чика формируется код N, пропорциональный значению NQ, но округленный до ближайшего большого целого, так как считываются только нечетные импульсы последовательности N. Узел 6 (фиг.5). На вход 14 узла подается код вели чины N - число шагов, а на вход 15, являющийся входом усилителя ОУ7, подается аналоговый сигнал S. Усилитель ОУ7 имеет обратную свя со звеном умножения, на второй вход которого подан выход цифроаналогово го преобразователя, преобразующего код N -в аналоговый сигнал. Таким образом, на усилителе ОУ7 реализована операция ST „ где S - длинашага балок - является выходным сигналом усилителя ОУ7. Основным технико-экономическим преимуществом предлагаемого устройства является повышение надежности работы механизмов загрузки-выгрузки и транспортирования слябов в печи. Побочным эффектом является снижение стоимости оборудования этих механизмов, так как для механизмов загрузкивыгрузки при этом не требуются системы позиционного регулирования - эти механизмы имеют постоянную длину хода от рольганга в печь и от печи к рольгангу при всех типоразмерах слябов.
- ЦАП -
.5 ОУ7 -,
I-EK-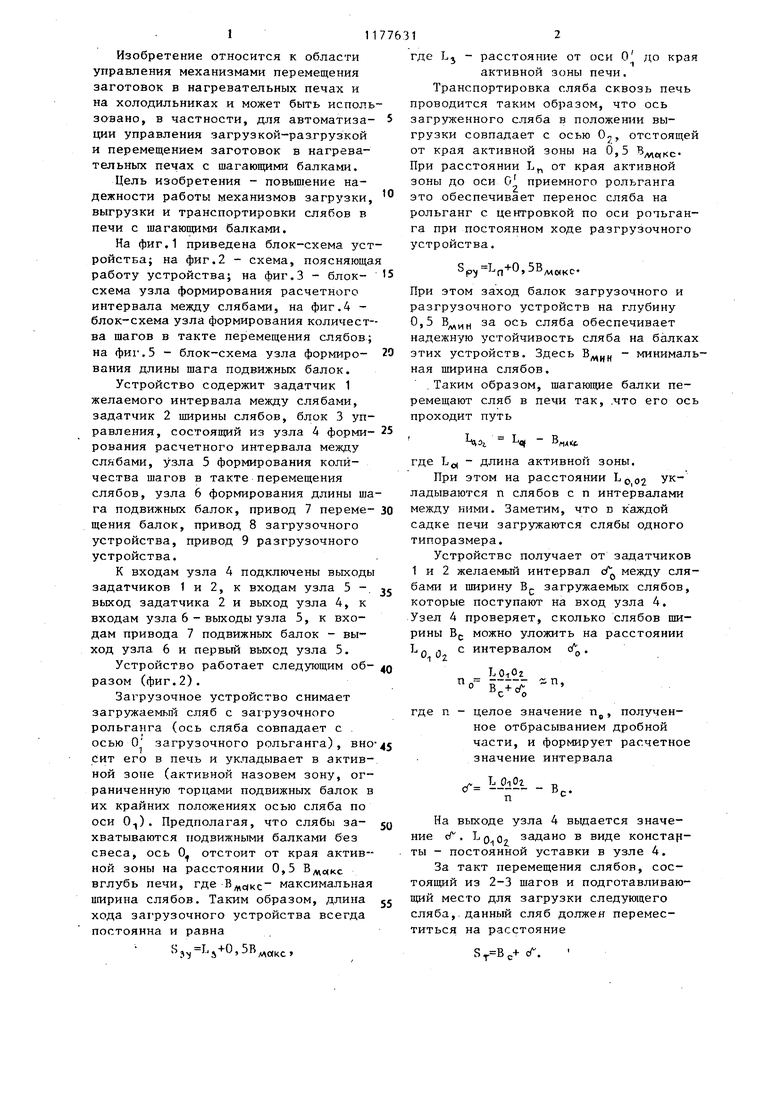
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления загрузкой и перемещением заготовок в нагревательной печи | 1982 |
|
SU1054651A1 |
| Устройство управления загрузкой печи для нагрева заготовок | 1981 |
|
SU1015219A1 |
| Устройство управления загрузкой печи для нагрева заготовок | 1982 |
|
SU1062487A1 |
| Устройство для управления загрузкой печи для нагрева заготовок | 1979 |
|
SU872925A1 |
| Устройство управления загрузкой печи для нагрева заготовок | 1981 |
|
SU1019201A1 |
| Устройство для управления загрузкой,выгрузкой и перемещением заготовок в нагревательной печи | 1985 |
|
SU1307196A1 |
| Устройство управления загрузкой печидля НАгРЕВА зАгОТОВОК | 1979 |
|
SU836476A1 |
| Способ управления горизонтальным перемещением шагающих балок в нагревательной печи | 1987 |
|
SU1532788A2 |
| УСТРОЙСТВО ДЛЯ РАЗБОРКИ СТОПЫ СЛЯБОВ С ПОСЛЕДУЮЩЕЙ ПЕРЕДАЧЕЙ ИХ НА РОЛЬГАНГ | 1991 |
|
RU2015480C1 |
| Способ управления загрузкой,выгрузкой и перемещением заготовок в печи | 1985 |
|
SU1320631A1 |
УСТРОЙСТВО УПРАВЛЕНИЯ ЗАГРУЗКОЙ-РАЗГРУЗКОЙ И ПЕРЕМЕЩЕНИЕМ ЗАГОТОВОК.В НАГРЕВАТЕЛЬНОЙ ПЕЧИ, содержащее приводы механизмов загрузки и безударной вьщачи и привод шагающих балок, задатчйки ширины слябов и желаемого интервала между слябами, блок управления, отличающееся тем, что, с целью повышения надежности работы механизмов загруз- ки, выгрузки и транспортировки слябов в печи с шагающими балками, блок управления состоит из трех узлов формирования расчетного интервала между слябами, формирования количества шагов в такте перемещения слябов, формирования длины шага, причем к входам узла формирования расчетного интервала подсоединяют выходы задатчика желаемого интервала и задатчика ширины слябов, к входам узла формирования количества шагов в такте перемещения слябов подсоединены выходы задатчика ширины слябов и узла формирования (Л расчетного интервала, к входам узла формирования длины шага подсоединены выходы узла формирования количества шагов, выходы узлов формирования количества шагов и формирования длины шага подсоединены соответственно к приводу шагающих балок. Од 00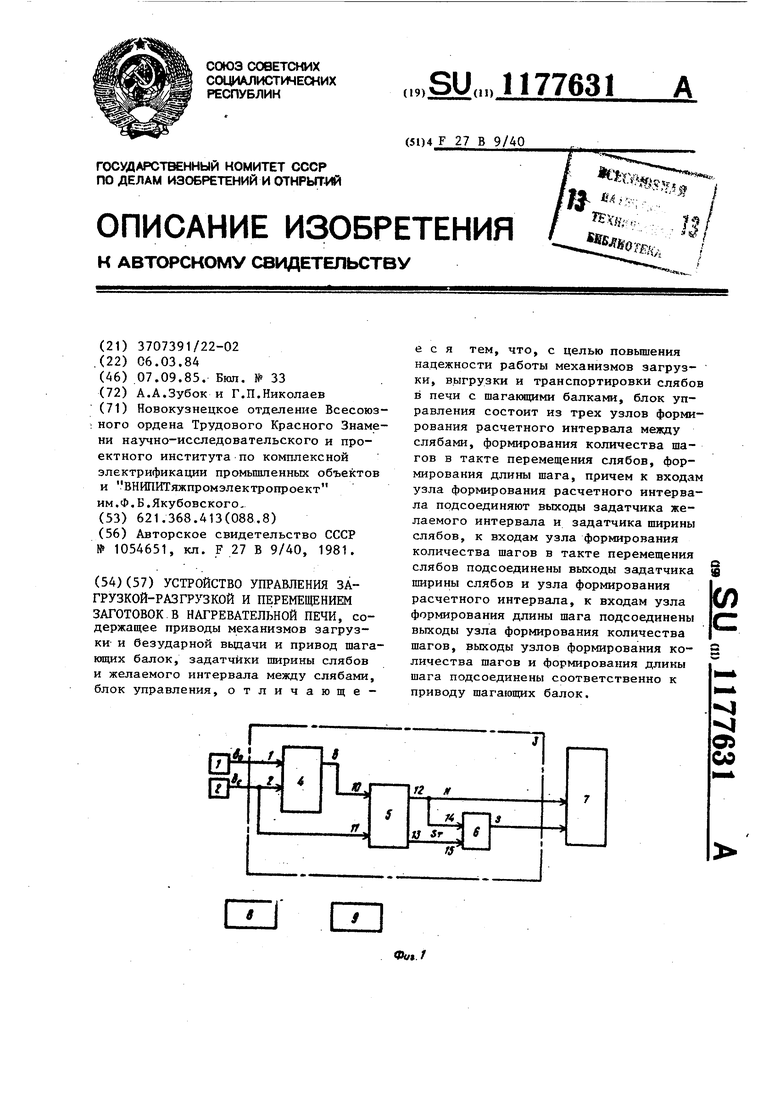
Фиг. 5
| Устройство для управления загрузкой и перемещением заготовок в нагревательной печи | 1982 |
|
SU1054651A1 |
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
