Изобретение относится к управлению средствами (механизмами) перемещения заготовок в нагревательной печи и может быть использовано для а.втомати- эации управления перемещением заготовок в методической нагревательной печи, оборудованной механизмом шагающих балок, в металлургической и других отраслях промышленности.
Цель изобретения - повышение точности позиционирования заготовок на позиции выгрузки в печи.
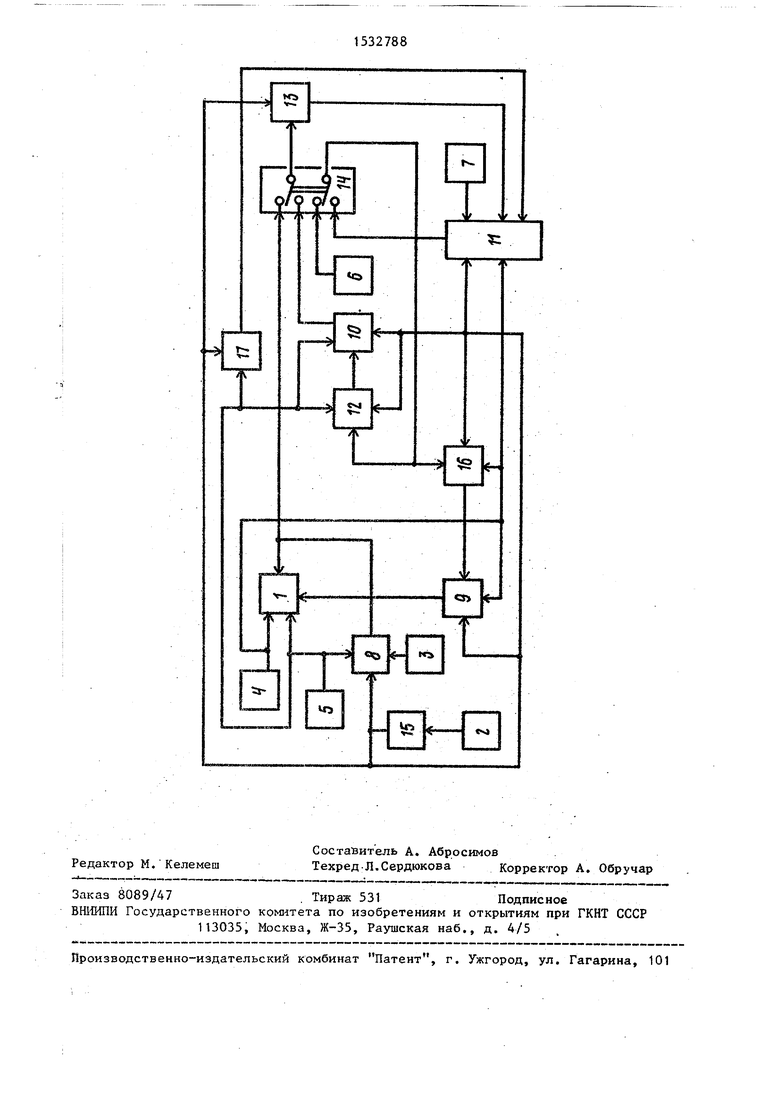
На чертеже представлена схема устройства для реализации способа управления горизонтальным перемещением шагающих балок в нагревательной печи.
Устройство содержит привод 1 горизонтального перемещения балок, датчик
2 пути балок, задатчик 3 положения сечения пода печи, задатчики 4, 5 сигналов пуска Назад и Вперед привода балок, задатчики 6,7 первой и второй заданной по технологии величины, компараторы 8,9 и 10, сумматоры 11 и 12, регистр 13, коммутатор 14, преобразователь 15 кода, сумматор 16 и регистр 17.
Преобразователь 15 кода обеспечивает преобразование выходного кода Грея датчика 2 в двоичный код. Преобразователь 15 кода может быть выполнен на базе программируемой логической матрицы. Введение преобразователя 15 кода в устройство позволяет упростить конструкции сумматоров. В основном изобретении отсутствие преобразоел
со 1C
00 00
N)
вателя кода на выходе датчика 2 компенсировалось введением соответствующих преобразователей в конструкции сумматоров.
Сумматор 16 обеспечивает суммирование в двоичном коде сигналов, поступающих на его первый и второй входы. На третий вход сумматора 16 поступает импульсный сигнал, управляющий процессом суммирования. Передний фронт импульсного управляющего сигнала обеспечивает обнуление содержимого сумматора 16 и затем суммирует с ним сигнал, поступающий на первый вход сумматора 16. Задний фронт управляющего сигнала обеспечивает суммирование содержимого сумматора 16 с сигналом, поступающим на его второй вход.
Регистр 17 предназначен для запо- минания (хранения) выходной величины преобразователя 15 кода, соответствующей пути, проходимому шагающими балками к торцу загрузки. Запоминание величины, поступающей на второй вход регистра 17, осуществляется в момент поступления сигнала на его первый вход. Конструктивно регистр 17 идентичен регистру 13.
Из сумматоров 11 и 12 по сравнению с основным изобретением исключены преобразователи кодов. Кроме того, в сумматоре 11 добавлен пятый вход, аналогичный второму входу, т.е. суммирующему с обратным знаком, а первый и второй входы сумматора 1 суммируют с удвоением значений величин, поступающих на эти входы.
Компаратор 9 в отличии от основно15
с первым входом компаратора 8 и первым входом сумматора 11. Выход датчи ка 2 пути соединен с входом преобразователя 15 кодов, выход которого 5 соединен с вторым входом компаратора 8, вторым входом компаратора 9, первым входом сумматора 12, вторым входом компаратора 10, третьим входом . сумматора 11, первым входом суммато- 0 ра 16, вторым входом регистра 17 и вторым входом регистра 13, первый вход которого соединен с вторым выходом коммутатора 14, первый выход которого соединен с вторым входом сумматора 16 и вторым входом сумматора 12, выход которого соединен с первым входом компаратора 10, выход которо- го соединен с третьим входом коммутатора 14, второй вход которого соединен с выходом задатчика 6. Выход компаратора 8 соединен е четвертым входом привода 4 и четвертым входом коммутатора 14, первый вход которого соединен с выходом сумматора 11. Выход сумматора 16 соединен с первым дом компаратора 9, выход которого соединен с третьим входом привода 1. Выходы регистров 13 и 17 соединены соответственно со вторым и пятым вхо- 30 дами сумматора 11.
Устройство в динамическом режиме работает следующим образом.
20
25
35
В исходном положении устройства коммутатор 14 находится в первом положении. В момент поступления сигнала с выхода задатчика 4 привод 1 запускается назад (к торцу загрузки печи) и инициализируется работа компаратрFO изобретения инициализируется на,пе-40 ра 9. В момент срабатывания компаратора 9 привод 1 переходит в режим торможения, по окончанию которого останавливается. В момент поступления сигнала с выхода датчика 5 привод 1
фронтом импульсного сигнала, поступа- 45 запускается вперед (к торцу выгруз- ющего на его первый вход.. ки и инициализируется работа
компаратора
Статическое состояние устройства характеризуется тем, что выход задатчика 4 со.единен с первым входом при- 50 вода 1, третьим входом компаратора 9, третьим входом сумматора 16 и четвертым входом сумматора 11. Выход заредним, а задним фронтом импульсного сигнала, поступающего на его третий вход. Аналогично привод 1 запускается к торцу загрузки (назад) задним
, В момент срабатывания компаратора 8 происходит запись выходной величины датчика 2 пути в регистр 13 и привод 1 переходит в режим торможения, по окончанию которого останавливается. После остановки привода 1 оператор переводит коммутатор 14 во второе положение.
датчика 5 соединен с вторым входом привода 1, третьим входом компаратора 8, третьим входом сумматора 12, , первым входом регистра 17 и третьим входом компаратора 10. Выходы задат- чиков 3 и 7 соединены соответственно
с первым входом компаратора 8 и первым входом сумматора 11. Выход датчи ка 2 пути соединен с входом преобразователя 15 кодов, выход которого соединен с вторым входом компаратора 8, вторым входом компаратора 9, первым входом сумматора 12, вторым входом компаратора 10, третьим входом . сумматора 11, первым входом суммато- ра 16, вторым входом регистра 17 и вторым входом регистра 13, первый вход которого соединен с вторым выходом коммутатора 14, первый выход которого соединен с вторым входом сумматора 16 и вторым входом сумматора 12, выход которого соединен с первым входом компаратора 10, выход которо- го соединен с третьим входом коммутатора 14, второй вход которого соединен с выходом задатчика 6. Выход компаратора 8 соединен е четвертым входом привода 4 и четвертым входом коммутатора 14, первый вход которого соединен с выходом сумматора 11. Выход сумматора 16 соединен с первым дом компаратора 9, выход которого соединен с третьим входом привода 1. Выходы регистров 13 и 17 соединены соответственно со вторым и пятым вхо- 0 дами сумматора 11.
Устройство в динамическом режиме работает следующим образом.
0
5
запускается вперед (к торцу выгруз- ки и инициализируется работа
компаратора
, В момент срабатывания компаратора 8 происходит запись выходной величины датчика 2 пути в регистр 13 и привод 1 переходит в режим торможения, по окончанию которого останавливается. После остановки привода 1 оператор переводит коммутатор 14 во второе положение.
В момент поступления импульсного сигнала (передний фронт) с выхода датчика 4 обеспечивается запись в сумматор 16 выходной величины преобразователя 15 кода и осуществляется
суммирование входных сигналов сумматором 1 1 .
В момент снятия импульсного сигнала (задний фронт) с выхода датчика 4 осуществляется суммирование содержимого сумматора 16 с величиной, поступающей на его второй вход, инициализируется работа компаратора 9 и запускается привод 1 на движение к торцу загрузки. В момент срабатывания компаратора 9 привод 1 переходит в режим торможения, по окончанию котоИспользование способа позволяет получить экономический эффект за сче
рого останавливается.
В момент поступления сигнала с вы- применения более простых (более на- хода датчика 5 осуществляется запись дежных и дешевых) систем управления в регистр 17 выходной величины преобразователя 15 кода, обеспечивается суммирование входных сигналов сумматором 12, инициализируется работа комвыгрузкой заготовок из печи (используются приемники слябов с постоянным ходом в печь). Кроме того, существен 20 но упрощается система комплексного у равления механизмами печи. Все это снижает стоимость указанных систем, повышает их надежность, обуславливая снижение простоев технологического
параторов 8 и 10 и привод 1 запускается на движение к торцу выгрузки (вперед).
В момент срабатывания компаратора
10 осуществляется запись в регистр 13 25 оборудования и соответствующих эконо-
выходной величины преобразователя 15 кода. В момент срабатывания компаратора 8 привод 1 переходит в режим торможения, по окончанию которого останавливается.
Далее чередование поступлений выходных сигналов задатчиков 4 и 5 обуславливает циклическую работу устройства (ход балок назад и затем вперед)
мических потерь.
Формула изобретения
30 Способ управления горизонтальным перемещением шагающих балок в нагревательной печи по авт.св. № 1374020, отличающийся тем, что, с целью повышения точности позициониПредложенный способ по сравнению с известным способом обеспечивает положительный эффект, заключающийся в снижении ошибки позиционирования заго.- товок на позиции выгрузки в печи. Ошибка. позиционирования, обусловленная нестабильностью в пути торможения шагающих балок, снижается до уров- ня погрешности позиционирования заготовок на последнем шаге, т.е. на порядок и более.
Использование способа позволяет получить экономический эффект за счет
применения более простых (более на- дежных и дешевых) систем управления
выгрузкой заготовок из печи (используются приемники слябов с постоянным ходом в печь). Кроме того, существен- но упрощается система комплексного управления механизмами печи. Все это снижает стоимость указанных систем, повышает их надежность, обуславливая снижение простоев технологического
мических потерь.
Формула изобретения
Способ управления горизонтальным перемещением шагающих балок в нагревательной печи по авт.св. № 1374020, отличающийся тем, что, с целью повышения точности позициони
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления горизонтальным перемещением шагающих балок в нагревательной печи | 1986 |
|
SU1374020A1 |
| Устройство для управления загрузкой,выгрузкой и перемещением заготовок в нагревательной печи | 1985 |
|
SU1307196A1 |
| Способ управления загрузкой,выгрузкой и перемещением заготовок в печи | 1985 |
|
SU1320631A1 |
| Устройство для учета перемещаемых изделий | 1985 |
|
SU1324045A1 |
| Устройство управления загрузкой печи для нагрева заготовок | 1982 |
|
SU1062487A1 |
| Устройство для управления загрузкой печи для нагрева заготовок | 1979 |
|
SU872925A1 |
| Устройство управления загрузкой печи для нагрева заготовок | 1981 |
|
SU1015219A1 |
| Устройство управления загрузкой печи для нагрева заготовок | 1981 |
|
SU1019201A1 |
| Способ управления загрузкой, выгрузкой и перемещением заготовок в кольцевой печи | 1989 |
|
SU1696826A1 |
| Устройство управления загрузкой-разгрузкой и перемещением заготовок в нагревательной печи | 1984 |
|
SU1177631A1 |
Изобретение относится к управлению средствами перемещения заготовок в методической нагревательной печи, оборудованной механизмом шагающих балок, в металлургической и других отраслях промышленности. Цель изобретения - повышение точности позиционирования заготовок на позиции выгрузки в печи. Путь, проходимый шагающими балками к торцу выгрузки до полной остановки, количественно равен значению алгебраической суммы величин задания шага балок и ошибки позиционирования, допущенной механизмом при обработке этого задания. Согласно изобретению вычитают из удвоенного значения задания шага балок величины пути, проходимого шагающими балками до полной остановки и используют указанную разность в качестве задания на последующий шаг балок. 1 ил.
в соответствии с приведенным описани- рования заготовок на позиции выгрузки
ем для второго положения коммутатора 14. Перевод устройства в исходное (статическое) состояние осуществляется переключением коммутатора 14 в положение I после остановки шагающих балок на позиции выгрузки.
в печи, вторую заданную по технологии величину устанавливают как разность между удвоенным значением задания шага балок и пути, проходимого шагаю- 40 ними балками к торцу выгрузки до полной остановки.
в печи, вторую заданную по технологии величину устанавливают как разность между удвоенным значением задания шага балок и пути, проходимого шагаю- 40 ними балками к торцу выгрузки до полной остановки.
I 9/У9/9 j
t
I
«VI
«
Ю
in
«V
| Способ управления горизонтальным перемещением шагающих балок в нагревательной печи | 1986 |
|
SU1374020A1 |
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
