Изобретение относится к управлению средствами загрузки, выгрузки и перемещения заготовок в нагревательных печах и может быть использовано для автоматизации управления загрузкой, выгрузкой и перемещением заготовок в печах с шагающими балками.
Цель изобретения - сокращение времени цикла загрузка-выгрузка и уменьшение интервала между заготовками.
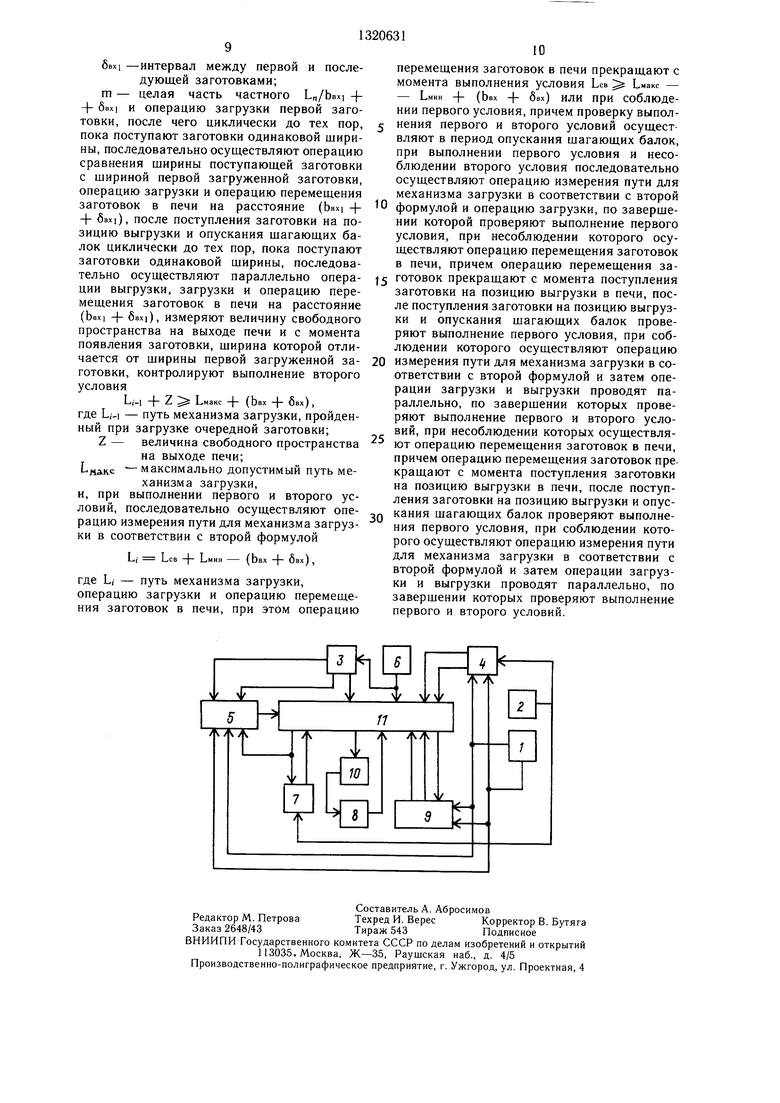
На чертеже приведена схема устройства для реализации предлагаемого способа.
Схема содержит датчики 1-6 соответственно пути механизмов шагающих балок и загрузки, ширины заготовки, свободного пространства на входе и выходе подины печи и наличия заготовки на позиции выгрузки; системы 7-9 соответственно загрузки, выгрузки и перемещения заготовок; блок 10 управления выгрузкой и блок 11 условий.
LCB LM + 2Х/- Ьм„„, (1) где LCB - величина свободного пространства, наблюдаемая на первом выходе датчика 4; L,-i - величина пути, пройденного механизмом загрузки при загрузке очередной заготовки, поступающая на первый вход блока 4; Ху - последовательность импульсов, поступающая с первого выхода датчика 1 на второй вход датчика 4; Ьмин -постоянная величина, значение которой равно минимальному пути, проходимому механизмом загрузки при загрузке заготовки. Датчик 4 может быть выполнен на базе | 5 блока выделения максимального значения, регистра, сумматора и управляемого ключа, при этом первый вход датчика 4 соединен с входом блока выделения максимального значения, выход которого соединен с вторым выходом датчика 4 и с пер10
Датчик 1 пути механизма щагающих ба- 20 вым входом сумматора, второй вход кото- лок обеспечивает на своем первом выходе рого через управляемый ключ соединен с последовательность X/ импульсов, количество
вторым входом датчика 4, третий вход которого соединен с управляющим входом ключа, выход регистра соединен с третьим входом сумматора, выход которого соединен с первым выходом датчика 4. Ключ при отсутствии сигнала на его управляющем входе замкнут, в противном случае - разомкнут. Блок выделения максимального значения в процессе увеличения значений Lt-i
которых в последовательности пропорционально пути, проходимого балками на каждом шаге. На втором выходе датчик 1 формирует позиционный сигнал в периоды обратного хода шагающих балок. Датчик 1 может быть выполнен на базе датчика импульсов типа ДИ-2М.
Датчик 2 пути механизма загрузки обеспечивает на своем выходе сигнал Lj-i в двоичном нормальном коде, величина которого пропорциональна пути, проходимому механизмом загрузки. Датчик 2 может быть выполнен на базе позиционного кодового датчика типа КД-4М.
Датчик 3 (измеритель) ширины заготовки предназначен для измерения ширины Ьвх заготовки, подлежащей загрузке, формирования на своем первом выходе сигнала (Ь + б)вх Ьвх -f- бвх, где бвх - интервал между загружаемой и предыдущей заготовками, хранения величин (Ь -|- б)вх и пе- редачи на свой третий выход сигнала (Ь + + б)вых после поступления сигнала на его вход. Значение сигнала (Ь + б)вых равно значению величины (Ь + б)вх для заготовки, поступившей на позицию выгрузки в печи. На втором выходе датчик 3 формирует сиг- нал bi, равный ширине первой заготовки, подлежащей загрузке. Датчик 3 может быть выполнен на базе измерителя ширины с оптической развертывающей системой, задатчика интервала между заготовками, например, в функции измеренной ширины (может быть выполнен на базе функционального преобразователя), регистров для хранения величин (Ь + б)вх и средств коммутации сигналов.
Датчик 4 величины LCB свободного прост- ранства на входе подины печи обеспечивает измерение величины LCB в соответствии с формулой
LCB LM + 2Х/- Ьм„„, (1) где LCB - величина свободного пространства, наблюдаемая на первом выходе датчика 4; L,-i - величина пути, пройденного механизмом загрузки при загрузке очередной заготовки, поступающая на первый вход блока 4; Ху - последовательность импульсов, поступающая с первого выхода датчика 1 на второй вход датчика 4; Ьмин -постоянная величина, значение которой равно минимальному пути, проходимому механизмом загрузки при загрузке заготовки. Датчик 4 может быть выполнен на базе блока выделения максимального значения, регистра, сумматора и управляемого ключа, при этом первый вход датчика 4 соединен с входом блока выделения максимального значения, выход которого соединен с вторым выходом датчика 4 и с пер
вым входом сумматора, второй вход кото- рого через управляемый ключ соединен с
вым входом сумматора, второй вход кото- рого через управляемый ключ соединен с
вторым входом датчика 4, третий вход которого соединен с управляющим входом ключа, выход регистра соединен с третьим входом сумматора, выход которого соединен с первым выходом датчика 4. Ключ при отсутствии сигнала на его управляющем входе замкнут, в противном случае - разомкнут. Блок выделения максимального значения в процессе увеличения значений Lt-i
выделяет максимальное значение L,-i и запоминает его на периоды уменьшения и нового роста величины L,-i. Сумматор обновляет свое содержимое после каждого изменения выходной величины блока выделения максимальной величины и уменьшает
свое содержимое на единицу в момент поступления импульса на второй вход.
Датчик 5 величины Z свободного пространства на выходе подины печи обеспечивает измерение величины Z в соответствии с формулой
Z U + Ь„„ - bi - L, - 2Х/ + S (Ыб)вь,х,(2)
где Ь„ - постоянная величина, значение которой равно рабочему пространству подины печи;
bi - ширина первой загруженной заготовки;
Z - величина свободного пространства, наблюдаемая на выходе датчика 5.
L, Lj,uH-т(Ьк +2вхЛ,
где Hi- целая часть частотного /(Ьвх1-|- + Ьвх|);
Ьвх| -ширина первой заготовки, подлежащей загрузке;
бвх1 - интервал между первой и последующей заготовками.
(Ь б)вх1 : Ьвх -|- бвх|.
Датчик 5 может быть выполнен на базе сумматора, четырех регистров и управляемого ключа. Первый и второй входы датчика 5 соединены соответственно с входами первого и второго регистров, которые обеспечивают запоминания первых значений поступающих на их входы величин. Выходы первого и второго регистров соединены с первым и вторым (вычитающими) входами сумматора, третий (вычитающий) вход сумматора через управляемый ключ соединен с третьим входом датчика 5, четверсистемы 9, при этом на третий вход системы 9 поступает позиционный сигнал направления горизонтального хода балок. Импульсный сигнал, поступающий на второй вход, с помощью счетчика импульсов превращается в двоичный нормальный код, значение которого определяет фактически пройденный путь шагающих балок. Поступление сигнала на третий вход системы 9 блокирует работу счетчика, т.е. запрещает подтый вход которого соединен с управляю- счет импульсов. Отработку заданного перещим входом ключа. Пятый вход датчика 5 соединен с четвертым входом сумматора, выход которого соединен с выходом датчика 5. Выходы третьего и четвертого регистров, хранящие соответственно величины Ь„ и LMHH, соединены соответственно с пятым и щестым входами сумматора. Ключ находится в разомкнутом состоянии при наличии сигнала на его управляющем входе. Содержимое сумматора уменьщается на величимещения система 9 осуществляет с постоянным максимально возможным щагом. После поступления сигнала S на первый вход системы 9 последняя осуществляет операцию 15 подъема щагающих балок и затем горизонтально перемещает заготовки на расстояние S. В момент равенства выходной величины счетчика значению S ход балок прекращается, на первом выходе системы 9 формируется сигнал, счетчик сбрасывается в
ну Ь и LI соответственно после поступ- 20 ноль и осуществляется операция опуска25
ления сигналов на его первый и второй входы. Содержимое сумматора уменьщается на единицу в момент поступления импульса на его третий вход. Содержимое сумматора увеличивается на величину (Ь + +б)в)1 после поступления (изменения) сигнала на его четвертый вход.
Датчик 6 наличия заготовки на позиции выгрузки в печи обеспечивает на своем выходе сигнал в периоды наличия заготовки на позиции выгрузки в печи. Датчик 6 вы- зо полняется на базе радиоизотопного датчика.
Система 7 загрузки заготовок содержит механизм загрузки с гидравлическим приводом. Система 7 обеспечивает перемещение заготовки от исходной позиции на заданния щагающих балок и затем обратный ход до исходной позиции. На втором выходе системы 9 формируется сигнал на время выполнения операции опускания щагающих балок. С момента снятия сигнала S на первом входе системы 9 прекращается ход балок, счетчик сбрасывается в ноль и осуществляется операция опускания щагающих балок и затем обратный ход до исходной позиции.
Блок 10 управления выгрузкой предназначен для формирования сигнала задания для системы 8 выгрузки заготовок после поступления сигнала на его вход и может быть выполнен на базе регистра, хранящего требуемое задание, и управляемого
Блок 10 управления выгрузкой предназначен для формирования сигнала задания для системы 8 выгрузки заготовок после поступления сигнала на его вход и может быть выполнен на базе регистра, хранящего требуемое задание, и управляемого
45
ное расстояние L;, величина которого пос- 35 ключа, соединяющего выход регистра с вы- тупает на первый вход системы 7. Сиг-ходом блока 10. Ключ имеет два управнал о фактически пройденном пути посту- ляющих входа, первый из которых соединен пает на второй вход системы 7. В мо- с входом блока 10 управления выгрузкой, мент равенства заданного значения пути.Второй вход предназначен для управления
фактически пройденному, система управле-блокировкой операции выгрузки, например,
ния гидроприводом обеспечивает обратный 40 в периоды неисправности (профилактики) ход механизму загрузки и после возвращения последнего на исходную позицию, формирует на выходе системы 7 сигнал об окончании операции загрузки.
Система 8 выгрузки заготовок из печи отличается от системы 7 только тем, что содержит в своем составе датчик пути механизма выгрузки, аналогичный датчику 2.
Система 9 перемещения заготовок в печи содержит механизм щагающих балок, гидро- 50 приводы вертикального и горизонтального хода щагающих балок с соответствующими системами управления гидроприводами и счетчик импульсов. Система 9 обеспечивает перемещение заготовок в печи на заданное расстояние S, значение которого пос- 55 личия заготовки на позиции выгрузки в пе- тупает на первый вход системы 9. Сиг-чи (Ь + б)вх, Z, LCB, L,-i. На 4, 5, 6 и 7-й вхонал о фактически пройденном пути на каж-ды блока 11 поступают сигналы, информидом щаге балок поступает на второй входрующие блок 11 об окончании операции
механизмов прокатной клети или для корректировки темпа выдачи заготовок.
Блок 11 услов ий предназначен для контроля выполнения условий:
LcB (Ь + б)вх;(3)
Ul + Z Ьмакс + (Ь + б)вх,(4)
где (Ь + б)вх Ьвх 4- бвх;
Ьмакс - максимально допустимый путь механизма загрузки
Lcb L, 4- (b-f d)Bx: (5)
и формирования сигналов управления для механизмов 7, 8 и 9 соответственно загрузки, выгрузки и перемещения заготовок в печи. На 1, 2, 3, 8 и 9-й входы блока 11 поступают соответственно сигналы насистемы 9, при этом на третий вход системы 9 поступает позиционный сигнал направления горизонтального хода балок. Импульсный сигнал, поступающий на второй вход, с помощью счетчика импульсов превращается в двоичный нормальный код, значение которого определяет фактически пройденный путь шагающих балок. Поступление сигнала на третий вход системы 9 блокирует работу счетчика, т.е. запрещает подсчет импульсов. Отработку заданного перемещения система 9 осуществляет с постоянным максимально возможным щагом. После поступления сигнала S на первый вход системы 9 последняя осуществляет операцию 15 подъема щагающих балок и затем горизонтально перемещает заготовки на расстояние S. В момент равенства выходной величины счетчика значению S ход балок прекращается, на первом выходе системы 9 формируется сигнал, счетчик сбрасывается в
20 ноль и осуществляется операция опуска5
о
ния щагающих балок и затем обратный ход до исходной позиции. На втором выходе системы 9 формируется сигнал на время выполнения операции опускания щагающих балок. С момента снятия сигнала S на первом входе системы 9 прекращается ход балок, счетчик сбрасывается в ноль и осуществляется операция опускания щагающих балок и затем обратный ход до исходной позиции.
Блок 10 управления выгрузкой предназначен для формирования сигнала задания для системы 8 выгрузки заготовок после поступления сигнала на его вход и может быть выполнен на базе регистра, хранящего требуемое задание, и управляемого
5 ключа, соединяющего выход регистра с вы- ходом блока 10. Ключ имеет два управ
в периоды неисправности (профилактики)
личия заготовки на позиции выгрузки в пе- чи (Ь + б)вх, Z, LCB, L,-i. На 4, 5, 6 и 7-й вхомеханизмов прокатной клети или для корректировки темпа выдачи заготовок.
Блок 11 услов ий предназначен для контроля выполнения условий:
LcB (Ь + б)вх;(3)
Ul + Z Ьмакс + (Ь + б)вх,(4)
где (Ь + б)вх Ьвх 4- бвх;
Ьмакс - максимально допустимый путь механизма загрузки
Lcb L, 4- (b-f d)Bx: (5)
и формирования сигналов управления для механизмов 7, 8 и 9 соответственно загрузки, выгрузки и перемещения заготовок в печи. На 1, 2, 3, 8 и 9-й входы блока 11 поступают соответственно сигналы насоответственно загрузки, выгрузки, перемещения заготовок в печи и окончания очередного шага балок. На 1, 2 и 3-м выходах блок 11 формирует соответственно сигналы задания для системы 7 выгрузки, разрешения для блока 10 управления выгрузкой и задания для системы 9 перемещения заготовок в печи. Пока поступают заготовки, ширина которых не отличается от ширины первой загруженной заготовки, на первом и третьем выходах блока 11 обеспечиваются сигналы LI и (Ь + б)вх1. В противном случае обеспечиваются сигнал Ц, сформированный в соответствии с формулой
L/ LCB -(- Ьмин (b-|-6)i
(6)
10 третьим входом блока 11 условий, первый выход которого соединен с вторым входом датчика 5 свободного пространства на выходе подины печи и первым входом системы 7 загрузки, выход которой соединен с четвертым входом блока 11 условий, второй выход которого соединен с .блоком 10 управления выгрузкой, выход которого соединен с входом системы 8 выгрузки, выход которой соединен с пятым входом блока 11 условий, шестой и седьмой входы
20 которого соединены соответственно с первым и вторым выходами системы 9 перемещения заготовок, первый вход которой соединен с третьим выходом блока 11 условий, восьмой и девятый входы которого соединены соответственно с первым и вторым выходами
и сигнал SMAKC , где SMAHC - максимально возможная величина шага балок.
Блок 11 условий может быть выполнен например, на базе множительно-делительно- го блока, сумматора, блока управления, регистров, компараторов, программируемой логической матрицы (ПЛМ), триггеров и средств коммутации сигналов (ключи, коммутаторы и т.д.).
Множительно-делительный блок, сумматор и блок управления обеспечивают фор- 25 датчика 4 свободного пространства на входе мирование сигналов L, L, и величин L,-i Z, Ьмакс - Ьмин(Ь -{- б)вх. Формирование указанных сигналов множительно-делитель- ный блок и сумматор осуществляет последовательно во времени под управлением блока управления. При этом сформированные 30 сигналы запоминаются в соответствующих регистрах. Блок управления идентифицирует появление (изменение) соответствующего сигнала, подключает его к соответствующему входу (входам) множительно-делитель- ного блока или сумматора с помощью 35 средств коммутации и инициирует соответствующую операцию (последовательность операции), после выполнения которой (которых) формирует сигнал записи (запоминания) для соответствующего регистра.дц
Регистры блока 11 предназначены для хранения (запоминания) величин Z, (Ь + б)вх,
(Ь -|- б)вх1, LCB, L;, Lj-i, Ьмакс, Ln, омакс, Z -}-{- , LMBKC - LMKH -|- (b + в)ax no мере их поступления или изменения.
Компараторы обеспечивают контроль вы- 45 полнения условий (3), (4) и (5) и щири- ны заготовок, подлежащих загрузке. Программируемая логическая матрица (ПЛМ) формирует сигналы управления для блока, управления триггеров и средств коммутации, обеспечивающих подключение (отключение) 50 выходов блока 11 к соответствующим регистрам, в функции выходных сигналов компараторов, блока управления и сигналов, поступающих на 1, 4, 5 и 6-й входы блока 11. При этом порядок и условия формирования выходных сигналов ПЛМ и блока управления однозначно определяются условиями и порядком выполнения операций предлагаемого способа.
подины печи, первый вход которого соединен с выходом датчика 2 пути механизма загрузки и с вторым входом системы 7 загрузки, первый выход датчика 1 пути механизма шагающих балок соединен с вторым входом системы 9 перемещения заготовок, с третьим входом датчика 5 свободного пространства на выходе подины печи, и с вторым входом датчика 4 свободного пространства на входе подины печи, третий вход которого соединен с вторым выходом датчика 1 пути механизма щагающих балок, с третьим входом системы 9 перемещения заготовок и с четвертым входом датчика 5 свободного пространства на выходе подины печи, пятый вход которого соединен с вторым выходом датчика 3 ширины заготовки.
Работа устройства начинается с момента измерения ширины первой заготовки, подлежащей загрузке. После измерения ширины первой заготовки на первом и втором выходах датчика 3 ширины появляются соответственно сигналы (Ь + б)вх (Ь + б)вх1 и bi, которые запоминаются соответственно в блоке 11 и датчике 5. Блок 11 формирует на своем первом выходе сигнал L, LI, который запоминается в датчике 5 и запускает операцию загрузки первой заготовки. По окончании операции загрузки (на четвертом входе блока 11 появляется сигнал) блок 11 снимает на своем первом выходе сигнал LI и формирует на своем третьем выходе сигнал S (Ь + б) вх,, запускающий операцию перемещения заготовок в печи на расстояние (Ь + б)вх1.
По окончании операции перемещения заготовок (на шестом входе блока 11 появляСтатическое состояние устройства характеризуется тем, что выход датчика 6 наличия заготовки на позиции выгрузки соединен с первым входом блока 11 условий и входом датчика 3 ширины заготовки, первый и второй выходы которого соединены соответственно с вторым входом блока 11 условий и с первым входом датчика 5 свободного пространства на выходе подины печи, выход которого соединен с
0 третьим входом блока 11 условий, первый выход которого соединен с вторым входом датчика 5 свободного пространства на выходе подины печи и первым входом системы 7 загрузки, выход которой соединен с четвертым входом блока 11 условий, второй выход которого соединен с .блоком 10 управления выгрузкой, выход которого соединен с входом системы 8 выгрузки, выход которой соединен с пятым входом блока 11 условий, шестой и седьмой входы
0 которого соединены соответственно с первым и вторым выходами системы 9 перемещения заготовок, первый вход которой соединен с третьим выходом блока 11 условий, восьмой и девятый входы которого соединены соответственно с первым и вторым выходами
5
5 датчика 4 свободного пространства на входе
датчика 4 свободного пространства на входе
подины печи, первый вход которого соединен с выходом датчика 2 пути механизма загрузки и с вторым входом системы 7 загрузки, первый выход датчика 1 пути механизма шагающих балок соединен с вторым входом системы 9 перемещения заготовок, с третьим входом датчика 5 свободного пространства на выходе подины печи, и с вторым входом датчика 4 свободного пространства на входе подины печи, третий вход которого соединен с вторым выходом датчика 1 пути механизма щагающих балок, с третьим входом системы 9 перемещения заготовок и с четвертым входом датчика 5 свободного пространства на выходе подины печи, пятый вход которого соединен с вторым выходом датчика 3 ширины заготовки.
Работа устройства начинается с момента измерения ширины первой заготовки, подлежащей загрузке. После измерения ширины первой заготовки на первом и втором выходах датчика 3 ширины появляются соответственно сигналы (Ь + б)вх (Ь + б)вх1 и bi, которые запоминаются соответственно в блоке 11 и датчике 5. Блок 11 формирует на своем первом выходе сигнал L, LI, который запоминается в датчике 5 и запускает операцию загрузки первой заготовки. По окончании операции загрузки (на четвертом входе блока 11 появляется сигнал) блок 11 снимает на своем первом выходе сигнал LI и формирует на своем третьем выходе сигнал S (Ь + б) вх,, запускающий операцию перемещения заготовок в печи на расстояние (Ь + б)вх1.
По окончании операции перемещения заготовок (на шестом входе блока 11 появляется сигнал) блок 11 снимает со своего третьего выхода сигнал и проверяет с помощью компаратора соответствие ширины заготовки, подлежащей загрузке, щирине первой загруженной заготовки и при наличии соот- ветствия формирует на своем первом выходе сигнал , запускающий операцию загрузки второй заготовки. Пока поступают заготовки одинаковой щирины указанный процесс повторяется до тех пор, пока пер- вая заготовка на займет позицию выгрузки в печи. На выходе датчика 6 наличия заготовки на позиции выгрузки появляется сигнал, который воспринимается блоком 11. Пос ледиий снимает сигнал S со своего третьего выхода и формирует на первом вы- ходе сигнал L, LI; а на втором - сигнал разрещения выгрузки. Запускаются параллельно операции загрузки и выгрузки, по окончании которых блок 11 снимает сигналы с первого и второго выходов и формирует сигнал S на третьем выходе, запус- кая операцию перемещения заготовок в печи на расстояние (Ь + б)вх1. Таким образом, процесс загрузки, выгрузки и перемещения заготовок продолжается до тех пор, пока поступают заготовки, щирина которых не отли- чается от щирины первой загруженной заготовки.
После поступления и измерения заготовки, щирина которой отличается от щирины первой загруженной заготовки, в блоке 11 срабатывает компаратор и устанавливает со- ответствующ.ий триггер в состояние «1. С этого момента блок 11 управляет операциями загрузки, выгрузки и перемещения заготовок в печи на базе анализа условий (3) и (4). Если не выполняется условие (3), то блок 11 иницирует операцию перемещения заготовок, формируя на третьем выходе сигнал S
Ьмакс LMHH -|- (b + S)BX. Съем СИГнала S на третьем выходе (прекращение операции перемещения) блок 11 осуществляет в момент выполнения условия (5) или при выполнении условия (3), причем про- верку выполнения условия (3) блок 11 осуществляет в периоды присутствия сигнала на его седьмом входе (осуществляется операция опускания щагающих балок). При выполнении условий (3) и (4) блок 11 фор- мирует сигнал L,, который запускает операцию загрузки. При невыполнении условий (3) и (4) блок 11 формирует сигнал S L,4Kc- Lj4HH-f (b+S )дзс на третьем выходе, запуская операцию перемещения заготовок в печи. При этом съем сигнала S блок 11 осуществляет в момент поступления сигнала на его первый вход, затем проверяет выполнение условия (3) и при выполнении последнего формирует на своих первом и втором выходах сигналы, инициирующие операции загрузки и выгрузки. В противном случае (условие (3) не соблюдается) формируется сигнал только на втором выходе. Таким образом, устройство осуществляет процесс загрузки, выгрузки и перемещения заготовок, щнрина которых может отличаться от щирины первой загруженной заготовки.
Способ обеспечивает положительный эффект, заключающийся в сокращении времени цикла загрузка-выгрузка, повыщении плотности заготовок в печи и расщирении-функциональных возможностей.
Предлагаемый способ позволяет получить экономический эффект за счет повышения производительности печи, обусловленного сокращением времени цикла загрузка-выгрузка и повышением плотности заготовок в печи. Последнее обстоятельство дает дополнительное увеличение экономического эффекта за счет снижения удельных затрат энергии на нагрев заготовок. Кроме того, расширенные функциональные возможности способа создают реальные предпосылки для комплексной автоматизации участка нагрева заготовок, что обеспечивает дальнейщий рост производительности нагревателей печи.
Формула изобретения
Способ управления загрузкой, выгрузкой и перемещением заготовок в печи, включающий контроль наличия заготовки на позиции выгрузки и с момента поступления заготовки на позицию выгрузки опускание щагающих балок и выгрузку, измерение щирины заготовки, подлежащей загрузке, и величины свободного пространства на входе печи, контроль вьшол нения первого условия
LCB (Ьвх -|- бвх) ,
где LCB - величина свободного пространства
на входе подины печи; Ьвх - щирина заготовки, подлежащей загрузке;
бвх - интервал между предыдущей заготовкой и заготовкой, подлежащей загрузке;
и при выполнении первого условия завер- щение перемещения заготовок в печи и осуществление последовательного измерения пути для механизма загрузки и операции загрузки очередной заготовки, отличающийся тем, что, с целью сокращения времени цикла загрузка-выгрузка и уменьшения интервала между заготовками, после измерения щирины первой заготовки осуществляют последовательно операцию измерения пути для механизма загрузки в соответствии с первой формулой
LI Ln -|- LMHH П1(Ьвх| -(- бвх),
где LI - путь механизма загрузки;
Ln- длина рабочего пространства печи; LMHH - минимальный путь механизма загрузки;
Ьвх - ширина первой заготовки, подлежащей загрузке;
OBXI -интервал между первой и последующей заготовками;
m - целая часть частного Ln/bexi + -|- бвх и операцию загрузкн первой заготовки, после чего циклически до тех пор, пока поступают заготовки одинаковой ширины, последовательно осуществляют операцию сравнения щирины поступающей заготовки с шириной первой загруженной заготовки, операцию загрузки и операцию перемещения заготовок в печи на расстояние (Ьвх| + + йвх), после поступления заготовки на позицию выгрузки и опускания шагающих балок циклически до тех пор, пока поступают заготовки одинаковой ширины, последовательно осуществляют параллельно операции выгрузки, загрузки и операцию перемещения заготовок в печи на расстояние (Ьвх1 + бвх|), измеряют величину свободного пространства на выходе печи и с момента появления заготовки, щирина которой отличается от ширины первой загруженной заготовки, контролируют выполнение второго условия
Lj-i - Z Ьмакс -)- (Ьвх бвх) ,
где L,H - путь механизма загрузки, пройденный при загрузке очередной заготовки;
Z - величина свободного пространства
на выходе печи;
LMAKC максимально допустимый путь механизма загрузки,
и, при выполнении первого и второго условий, последовательно осуществляют операцию измерения пути для механизма загрузки в соответствии с второй формулой
L,- LCB -|- LMHH (Ьвх -|- бвх) ,
где L, - путь механизма загрузки, операцию загрузки и операцию перемещения заготовок в печи, при этом операцию
перемещения заготовок в печи прекращают с момента выполнения условия LCB LMBKC - - LMHH -{- (Ьвх -(- бвх) или при соблюдении первого условия, причем проверку выполнения первого и второго условий осуществляют в период опускания щагающих балок, при выполнении первого условия и несоблюдении второго условия последовательно осуществляют операцию измерения пути для механизма загрузки в соответствии с второй
О формулой и операцию загрузки, по заверще- нии которой проверяют выполнение первого условия, при несоблюдении которого осуществляют операцию перемещения заготовок в печи, причем операцию перемещения за5 готовок прекращают с момента поступления заготовки на позицию выгрузки в печи, после поступления заготовки на позицию выгрузки и опускания шагающих балок проверяют выполнение первого условия, при соблюдении которого осуществляют операцию
0 измерения пути для механизма загрузки в соответствии с второй формулой и затем операции загрузки и выгрузки проводят параллельно, по завершении которых проверяют выполнение первого и второго условий, при несоблюдении которых осуществляют операцию перемещения заготовок в печи, причем операцию перемещения заготовок прекращают с момента поступления заготовки на позицию выгрузки в печи, после поступления заготовки на позицию выгрузки и опусQ кания шагающих балок проверяют выполнения первого условия, при соблюдении которого осуществляют операцию измерения пути для механизма загрузки в соответствии с второй формулой и затем операции загрузки и выгрузки проводят параллельно, по завершении которых проверяют выполнение первого и второго условий.
5

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления загрузкой печи для нагрева заготовок | 1979 |
|
SU872925A1 |
| Устройство для управления загрузкой,выгрузкой и перемещением заготовок в нагревательной печи | 1985 |
|
SU1307196A1 |
| Устройство управления загрузкой печи для нагрева заготовок | 1981 |
|
SU1015219A1 |
| Способ управления горизонтальным перемещением шагающих балок в нагревательной печи | 1986 |
|
SU1374020A1 |
| Устройство для управления загрузкой и перемещением заготовок в нагревательной печи | 1982 |
|
SU1054651A1 |
| Устройство управления загрузкой печи для нагрева заготовок | 1982 |
|
SU1062487A1 |
| Устройство управления загрузкой печи для нагрева заготовок | 1977 |
|
SU731244A1 |
| Устройство управления загрузкой печи для нагрева заготовок | 1981 |
|
SU1019201A1 |
| Способ управления загрузкой, выгрузкой и перемещением заготовок в кольцевой печи | 1989 |
|
SU1696826A1 |
| Устройство управления загрузкой печидля НАгРЕВА зАгОТОВОК | 1979 |
|
SU836476A1 |
Изобретение относится к управлению механизмами нагревательной печи с шагающими балками. Цель изобретения - сокращение времени цикла загрузка-выгрузка и уменьшение интервала между заготовками. Существо изобретения заключается в том, что способ включ ет операции загрузки, выгрузки и перемещения заготовок в печи, формирования заданий для механизмов загрузки и перемещения заготовок, контроля наличия заготовки на позиции выгрузки и свободного пространства на входе подины печи. Новым в способе является введение операций контроля ширины поступающих заготовок на соответствие ширине первой загруженной заготовки и свободного пространства на выходе подины печи, введение нового порядка формирования заданий для механизмов загрузки и перемещения заготовок, новых условий прекращения операции перемещения заготовок в печи и возможности параллельного выполнения операций загрузки и выгрузки. 1 ил. с со оо ND О О5 00
| Устройство управления загрузкой печи для нагрева заготовок | 1977 |
|
SU731244A1 |
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
| Патент США № 3556492, кл | |||
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
| Устройство для управления загрузкой и перемещением заготовок в нагревательной печи | 1982 |
|
SU1054651A1 |
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
