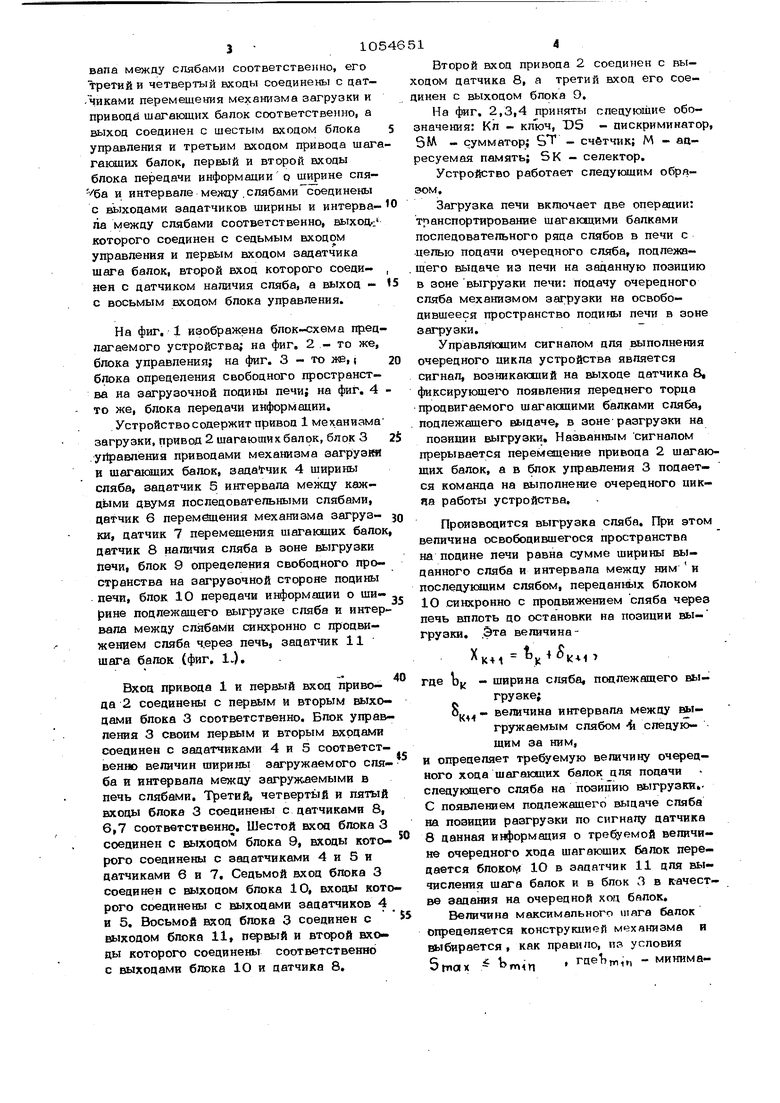
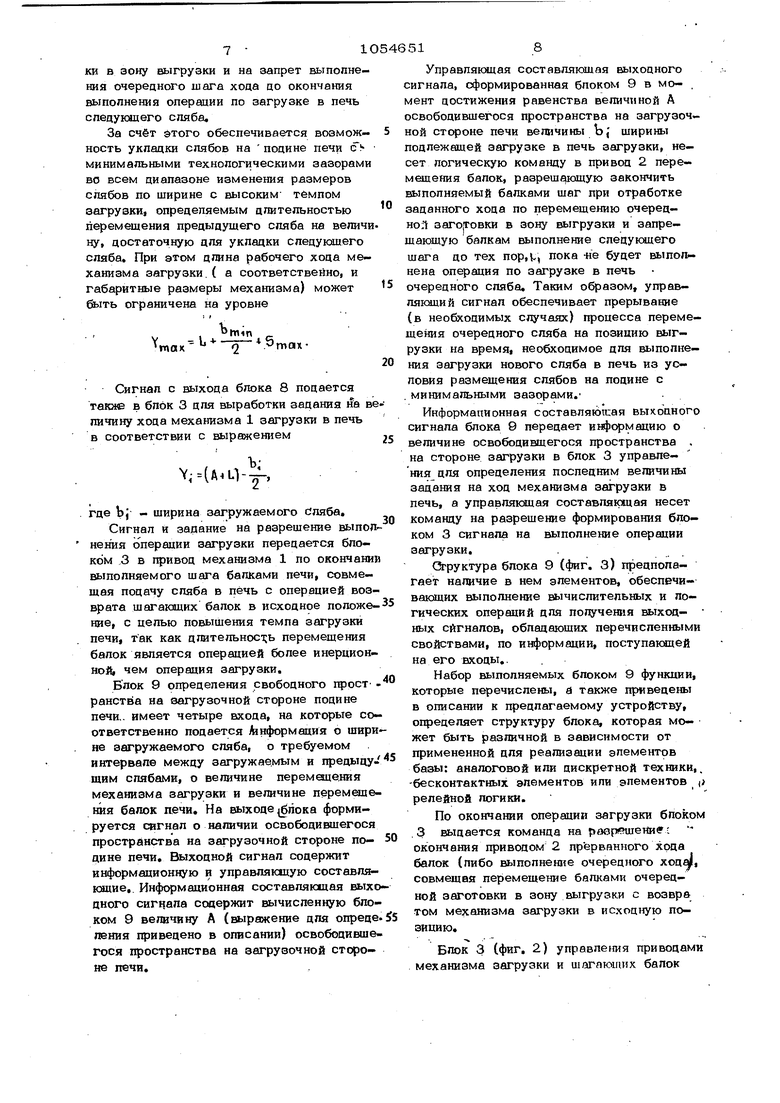
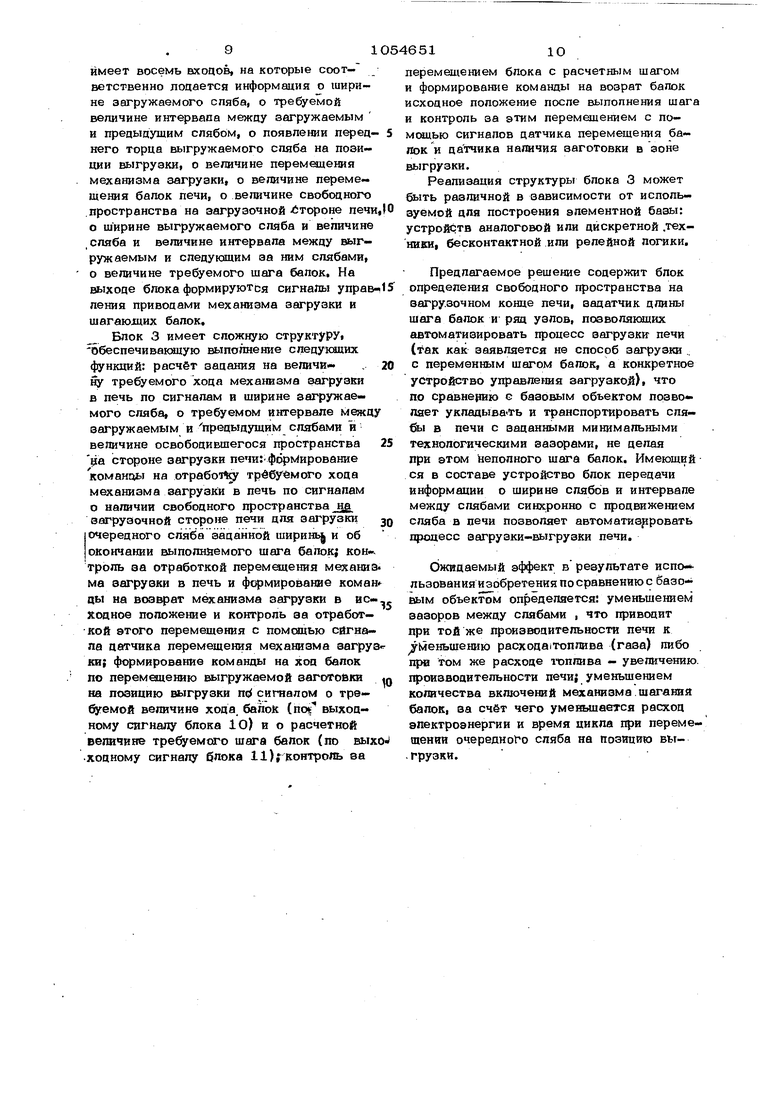
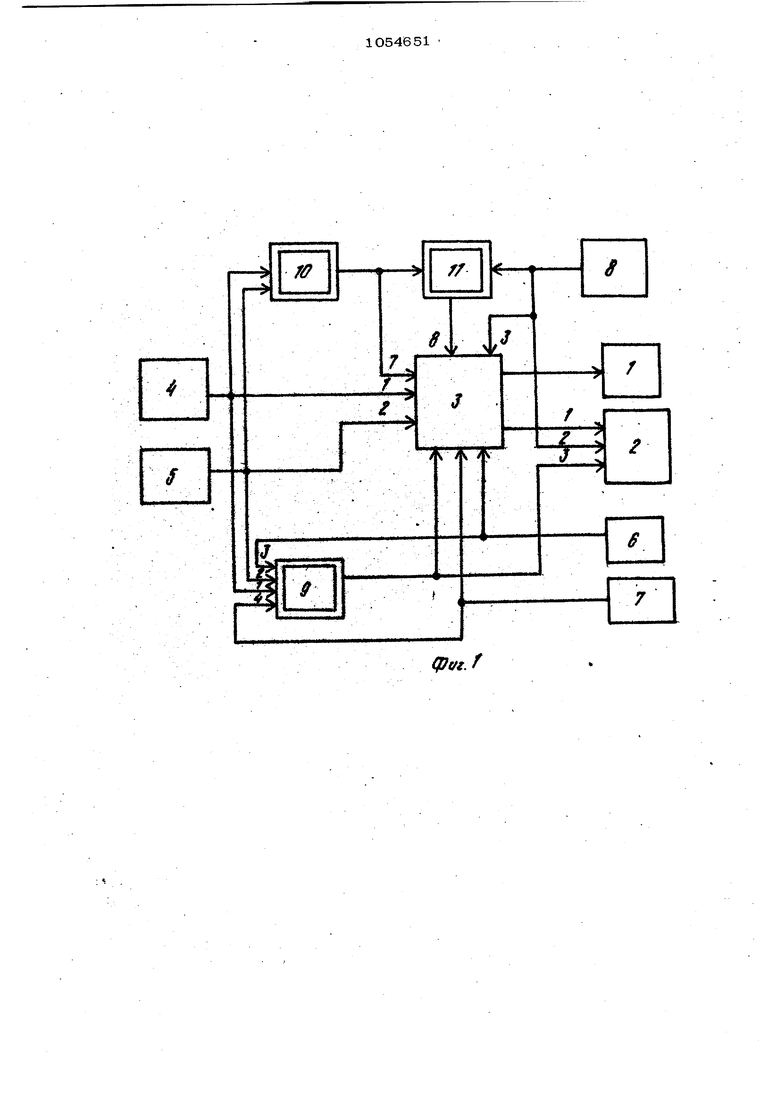
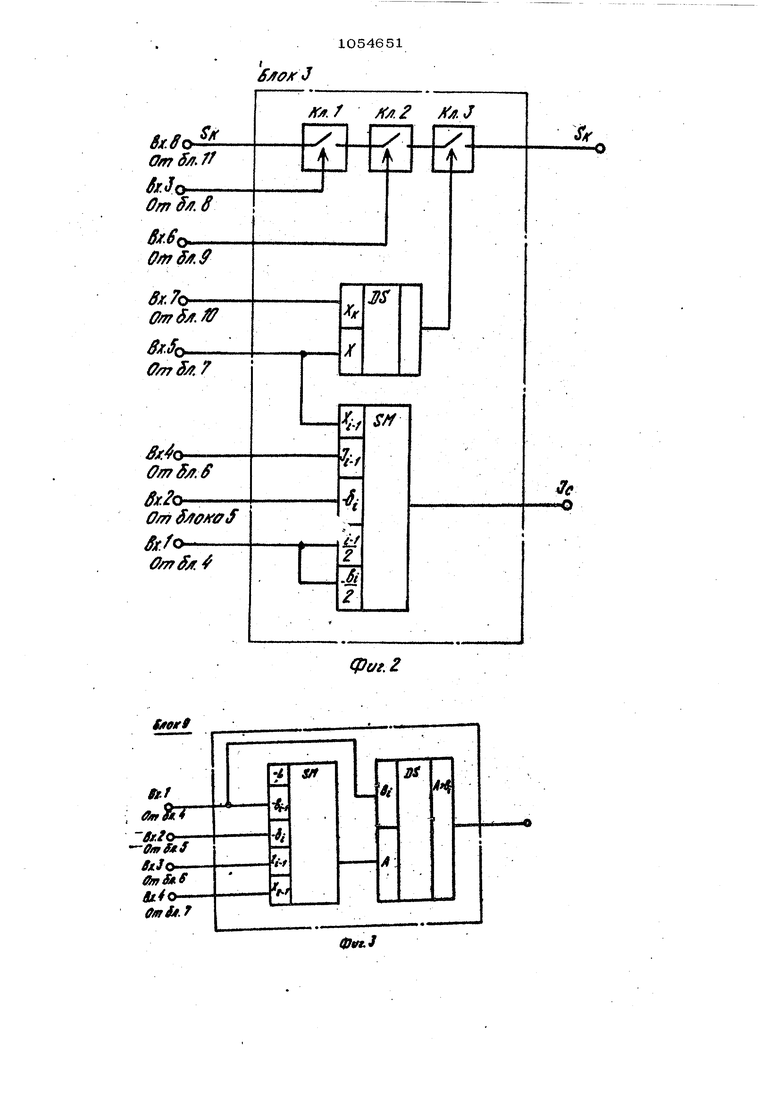
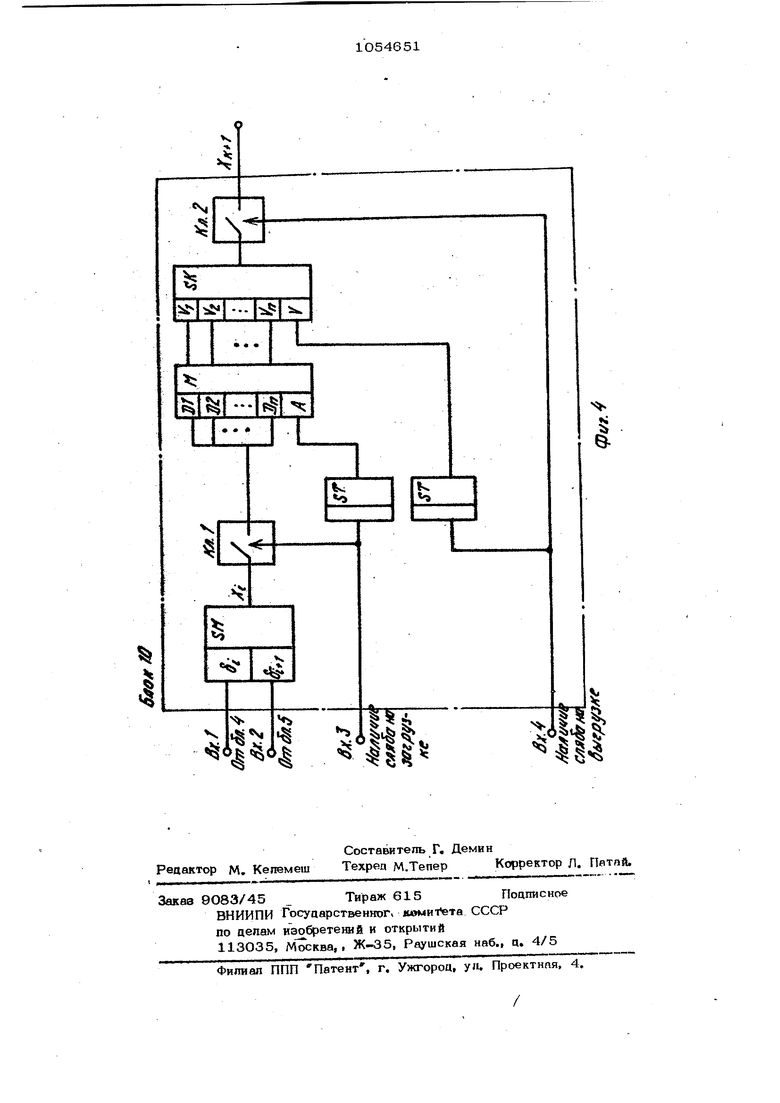
Ивобретение относится к. управпешлю Механизмами перемещещ{я заготовок в нш реватепьныХ печах и может быть испо- пьзовано, в частности, цпя автомйтиаации управления загрузкой и перемещением за- готовок в иагреватеньных печах с шагающими бапками, Известно устройство, содержащее при воцы механизма загрузки и шш-аюищх бапок, бпок управления подключенный пер вым выходом к привоау механизма загруз ки, а вторым - к приводу шагающих бапок задатчик раскпацки сгибов, датчик наличия спябов и датчик положения меха- низма загрузки, -подкпюченные соответст- венно к первому, второму и третьему вхо дам блока управления, блок определения шага раскладки групп спябов, подключенный своим выходом к четвертому входу блока управления, а входом - к задатчику шага раскладки спябов. Наиболее близким :к изобретению по технической сущности и достигаемому эффекту является устройство, содержащее приводы механизма загрузки и шаг ающих балок, блок управления, первый и второй выходы которого соединены с приводом механизма загрузки и первым входом, привода шагающих балок соответственно, зада датчик ширины и задатчик интервала меж ду слябами, соединенные с первым li вторым входами блока управления соответственно, датчик перемещения шагающих балок, выход которого соединен с шестым входом бпока управления, датчик наличия сляба, установленный на грашще зоны выгрузки печи, соединенный со входом датчика перемещения бапок и вторым входом- , привода шагающих балок, счётчик числа шаj;;oB балок, выход которого соединен с пятым входом блока управления, датчик окончания полного балок, выход которого соединен со входом счетчика перемещений механизма загрузки, соединенного с чет™вертым входом блока управления 2j „ Общим недостатком известных устройста является то, что наличие-фиксированной неизменной величины шага шагакяцих балок и наличие ограничения хода механиз загрузки (иа конструктивных сообра-. жений) на уровне максимально aonycTH «i Мой величины на позволяют осуществит раскладку слябов с; минимальными технологическими зазорами при переходе от од ..ного размера по ширине сляба к другом/. Это ведет к недоиспользованию рабочего, пространства подины печи (либо неподвиж ных балок печи), снижая её пропускную способность. В случае, когда выгружаемая заготов ка имеет размер по ширине меньше;, ыем подлежащая загрузке, освободившегося пространства на подине после выгрузки и перемещения шагатацих .балок на соотвёт ствующую этому пространству величину недостаточно для размещения очереднойзаготовки. Приходится пропускать одну загрузочную операцию и производить следукяций цикл по перемещению шагаювдах балок. Но при ограничении хода механизма загрузки выдержать минимапь№1й аааор между заготовками не удается. Другим недостатком известного устройства 2 является необходимость совершения неполного шага балок при остановке очередного сляба в зоне разгрузки с последующей выгрузкой, на время вьшопнения которой блокируются приводы загрузочного устройства .и шагания балок, что ведет к увеличению времени цикла загрузки следукздего сляба за счёт необхо- г димости завершения предыдущего непопного шага балок, снижению темпа загрузки и увеличению числа включений приводи Шагающих балок, повышающих расход элекм троэнергии в каждом цикле загрузки печи. Цепь изобретения - повышение пропуск-t ной способности печи. Поставленная цель достигается тем, что устройство для управления загрузкой и перемещением заготовок в нагревательной печи, содержащее привод механизма загрузки, привод шагающих бапок, бпок управления, первый и второй выходы которого соединены ,с приводом механизма загрузкии первым входом привода шагающих балок соответственно, задатчик ширины и задатчик интервала межцу спябами, соединенные с первым и вторым нходами бпока управления соответственно, датчик перемещения шагаюдих| бапок, выход которого соединен с пятым ЕХОДОМ бпока управления, датчик наличия сляба, установпенный в зоне выгрузки печи, соединенный с третьим входом блока управления н вторым входом привода шагаюишх алок, и датчик перемещения механизма загрузки, соединенный с четвер-пым входом бпока уп- равпения допопнительно снабжено бпоком опредепения свободного пространства на загрузочной стороне подины печи, блоком передачи информации о ширине и интервале между спябами синхронно с продвижением сдяба в печи и аадатчиком шага бапок, при этом первый и второй входы бпока опредепения свободного пространства с выходами вадатчиков ширины и интервапа между слябами соответственно, его третий и четвертый входы соединены с цат- -пиками перемещения механизма загрузки и приводи шагающих бапок соответственно, а выход соединен с шестым входом блока управления и третьим входом привода шага гаюших балок, первый и второй входы блока передачи информации о ширине сляба и интервале между ,слябами соединены с Еьтходами задатчиков ширины и интерваlia между слябами соответственно, выход,; юторого соединен с седьмым входом управления и первым входом аадатчика шага бапок, второй вход которого соединей с датчиком наличия сляба, а выход с восьмым входом блока управления. На фиг, 1 изображена блок-схема предлагаемого устройства; на фиг. 2 - то же, блока управления; на фиг. 3 - то же, ( блока определения свободного пространства на загрузочной подины печи; на фиг. 4 то же, блока передачи информации. Устройство содержит привод 1 механизма загрузки, привод 2 шагающих бапок, блок 3 .уйравления приводами механизма загрузки и шагающих балок, задагчик 4 ширины сляба, задатчик 5 интервала между каждыми двумя последовательными слябами, цнтчик 6 перемещения механизма загрузки, датчик 7 перемещения шагающих бапок датчик 8 наличия сляба в зоне выгрузки Печи, блок 9 определения свободного пространства на загрузочной стороне подины печи, блок 10 передачи информации о ши рнне подлежащего выгрузке сляба и интер вала между слябами синхронно с продаяжением спяба через печь, зацатчик 11 шага бапок (фиг, 1.). Вход привода 1 и первый вход привода 2 соединены с первым и вторым выходами блока 3 соответственно. Блок управ пешя 3 своим первым и вторым входами соединен с задатчиками 4 и 5 соответственно величин ширины загружаемого сля- ба и интервала между загружаемыми в печь слябами. Третий, четвертый и пятый входы блока 3 соединены с датчиками 8, 6,7 соответственно. Шестой вход блока 3 соединен с выходом блока 9, входы которого соединены с задатчиками 4 и 5 и датчиками 6 и 7. Седьмой вход блока 3 соединен с выходом блока 10, входы кото рого соединены с выходами задатчиков 4 в 5. Восьмой вход блока 3 соединен с выходом блока 11, первый и вт1фой входы которого соединены соответственно с выходами блока 1О и датчика 8. 10 14 Второй вход привода 2 соединен с выодом датчика 8, а третий вход его соеинен с выходом блока 9. На фиг. 2,3,4 приняты следующие обозначения: Кл - ключ, DS - дискриминатор, 6W - сумматор; ST - счётчик; М - адресуемая память; SK - селектор. Устройство работает следующим обряэом. Загрузка печи включает две операции: тпанспортированне шагающими балками последовательного ряда слябов в печи с -целью подачи очередного сляба, подлежащего выдаче из печи на заданную позицию в зоне выгрузки печи: подачу очередного сляба механизмом загрузки на освободившееся пространство подины печи в зоне загрузки. Управляющим сигналом для выполнения очередного цикла устройства является сигнал, возникакший на выходе датчика 8, фиксирующего появления переднего торца продвигаемого шагающими балками сляба, подлежащего выдаче, в зоне разгрузки на позиции выгрузки. Названным сигналом прерывается перемещение привода 2 шагающих балок, а в блок управления 3 подается команда на выполнение очередного пикпа работы устройства. Производится выгрузка сляба. При этом величина освободившегося пространства на подине печи равна сумме ширины выданного сляба и интервала между ним и последующим слябом, переданнь1х блоком 1О синхронно с продвижением сляба через печь вплоть до остановки на позиции выгрузки. .Эта величина tjjji.,, bjj - ширина сляба, подлежащего выгрузке;величина интервала между выгружаемым слябом 4i следующим за ним, и определяет требуемую величину очередного хода шагающих балок для подачи следующего спяба на позицию выгрузки.С появлением подлежащего выдаче сляба на позиции разгрузки по ст гнапу датчика 8 данная ии} ормация о требуемой величине очередного хода шагающих белок передается блоком 1О в эадатчик 11 для вычисления шага балок и в блок 3 в качестве задания на очередной хогд балок. Величина максимального шага балок определяется конструкцией механизма и выбирается , как правило, ид условия trun - минимапьиый по ширине размер сляба на циапааона возможных. При выполнении требуемого хода шага юших бапок с максимальным шагом для выпопнеиия условия остановки подлежитего выгрузке сляба в заданной позиции в зоне выгрузки не исключается возможнбс осуществления неполного шага балок неполным,что увкличивает число включений привода шагания балок в течение цикла работы и снижает темп .загрузки, блокируя на время выгрузки работу приводов шагающих балок и механизма загрузки, В устройстве в случае равенства отно- )(ц., шения ,-i цробной вешчине за . буемое Число шагов балок t) принимается следующее число из ряйа натуральных чисел, И требуемая величина шага балок при выполнении успо)№я кратности шагани балок в течение требуемого хода определится зацатчиком 11 как. Исполтззование управляемого по величинешага балок, изменяембго в диапазоне от минимального до максимального значения, позволит независимо от ширины вы гружаемого сляба и интервала спя- бами всегда .получать ход балок кратны шагу, т, е, исключить возможность появления при выполнении очередного хода по заданному перемещению сляба последнего неполного шага балок, А. это позволяет уменьшить число включений привода шагающих ёалок за цикл : перемещения сляба в печи и совместить операцию выгрузки сляба с обратным ходом шагакших балок в исходное /положение, эа,счёт чего повысить темп загрузки печи. Вычисленная величина задания Sj пере дается в блок 3, осуществляющий управление очередным перемещешем привода 2 шагающих балок. Контроль за, отработкой перемещения балок при заданных величинах хода и шага балок осуществляется блоком 3 с помощью поступающей в блок информации с ЕЫхода импульсного датчика 7 перемещения балок. этом ToHfнос1ъ отработки перемещения, а такие искточение ударов в механизме перемещени обеспечивается подачей задатчиком 11 в блок 3 упреждающего сигнала на сниже1ш скорости перемещения балок при подходе послед шх к заданному расстоянию от точ ки окош1ания каждого.шага балок, обеспечивая плавный подход механизма балок к заданной координате перемещения. Вь полнение операции по загрузке очередного сляба в печь осуществляется с ПОМОЩЬЮ введенного: е устройство блока 9 определения свободного пространства на подине печи со стороны загрузки. БЛОК 9 на основании информ.ации о ширине сляба, подлежащего загрузке в печь, поступакяней с вьиода задатчика 4 о требуемой (минимальной величине v зазора между подлежащим загрузке слябом и предыдущим загруженным слябом, . поступаклцей с выхода задатчика 5, а величине рабочего хода механизма 1, загрузки, совершенного при загрузке предыдущего сляба и измеренного с помощью импульсного датчика 6 перемещения, и о величине хода балок, совершенного приводом 2 при перемещении предыдущего сляба от момента окончания загрузки его до момента определения свободного мести блоком 9 и измеренного с помощью датчика 7, определяет величину освободившегося пространства на загрузочной стороне подины печи в соответствии с выражением Mix.,4e..,),, где X - величина хода шагающих ба лок при перемещении предыдущего сляба в пачи; йчмная от момент окончания загрузки его до момента определения свободного места на стороне загрузки; , - величина .рабочего хода механизма загрузки при загрузке предыдущего сляба в печь; L - расстояние от оси загрузоч- ,ного рольганга до задней границы зоны загрузки печи; Ь размер по ширине предыдуще го, загруженного в печь сляба;Вц -. требуемая величина зазора между загруженным и подлежащим загрузке слябом. При наличии свободного пространства на загрузочной стороне подины печй, определенной блоком 9s по достижении равенстваА Ъь где - ширина спяба, подлежащего загрузке в печь, блок 9 выдает сигнал в привод -2 на окончание выполняемого шага баЛок при отработке заданного хода балок по перемещению очередной заготов ки в зону выгрузки и на запрет выполнения очередного шага хода до окончания выполнения операции по загрузке в печь следующего сляба. За счёт этого обеспечивается возможность укладки слябов на подине печи (Г минимальными технологическими зазорами во всем диапазоне изменения размеров слябов по ширине с высоким- темпом загрузки, определяемым длительностью перемещения предыдущего сляба на величи ну, достаточную для укладки следующего сляба. При этом длина рабочего хода механизма загрузки.( а соответственно, и габаритные размеры механизма) может ограничена на уровне bmin л .ХЗтах Сигнал с выхода блока 8 подается также в блок 3 для выработки задания на в личину хода механизма 1 загрузки в печь в соответствии с вь:ражением V-(A4LV где bj - щирина загружаемого Сляба, Сигнал и aajqaHwe на разрешение выпол нения операции загрузки передается блоком 3 в привод механизма 1 по окончани выполняемого шага балками печи, совмещая подачу сляба в печь с операцией воз врата шагающих балок в исходное положе ние, с целью повышения темпа загрузки печи, так как дпительност;ь перемещения балок является операцией более инерционной, чем операция загрузки. БЛОК 9 определения свободного прост ранства на загрузочной стороне подине печи,- имеет четыре входа, на которые со ответственно подается А5нформация о шири не загружаемого сляба, о требуемом интервале между загружаемым и предыду щим слябами, о величине перемещения механизма загру;зки и величине перемеше шя балок печи. На выходе бпока формируется сигнал о наличии освободившегося пространства на загрузочной стороне подине печи, &лходной сигнал содержит информационную и управляющую составляющие. Информационная составляющая вьтх цного сигнала содержит вычисленную бло ком 9 величину А (выражение дпя опреде ления приведено в описании) освободивше гося пространства на загрузочной стороне печи. 1 518 Управлякяцая составляющая выходного сигнала, сформированная блоком 9 в мо- . мент достижения равенства величиной А освободившегося пространства на загрузочной стороне печи величины bj ширины подлежащей загрузке в печь загрузки, несет логическую команду в привод 2 перемацения балок, разрешающую закончить ш шолняемый балками шаг при отработке заданного хода по перемещению очередной заготовки в зону выгрузки и запрещающую балкам выполнение следукщего шага до тех nop,w, пока -не будет выполнена операция по загрузке в печь очередного сляба. Таким образом, управляющий сигнал обеспечивает прерывание (в необходимых случаях) процесса перемещения очередного сляба на позицию выгрузки на время, необходимое для выполнения загрузки нового сляба в печь из условия размещения слябов на подине с минимальными зазорами. Информационная составляющая выходного сигнала блока 9 передает информацию о величине освободившегося пространства , на стороне загрузки в блок 3 управления для определения поспедним величины задания на ход механизма загрузки в печь, а управляющая составля1ацая несет команду на разрешение формирования блоком 3 сигнала на выполнение операции загрузки. Сй руктура блока 9 (фиг. 3) предполагает наличие в нем элементов, обеспечивающих выполнение вычислительных и логических операций цля подучения выход- ных сигналов, обладающих перечисленными свойствами, по информации, поступающей на его входы,. . Набор выполняемых блоком 9 функции, которые перечислены, а также приведены в описании к предлагаемому устройству, определяет структуру блока, которая может быть различной в зависимости от примененной для реализации элементов базы: аналоговой или дискретной техники,. -бесконтактных элементов ипи элементов ( релейной логики. По окончании операции загрузки блоком , 3 выдается команда на роорешени с окончания приводом 2 прерванного хода балок (либо ныполнеш1е очередного ход, совмещая перемещение балками очередной заготовки в зону выгрузки с возвра том механизма загрузки в исходную позицию. БЛОК 3 (фиг. 2) управления приводами механизма загрузки и шагающих бапок имеет восемь входов, на которые соот ветственно подается информация о ширине загружаемого спяба, о требуемой величине интерваоа между загружаемым и предыдущим слябом, о появлении перед него торца выгружаемого спяба на позиции выгрузки, о величине перемещения механизма загрузки, о величине перемещения балок печи, о величине свободного пространства на загрузочной йтороне печ о ширине выгружаемого сляба и величине ,сляба и величине интервала между выгружаемым и следующим за ним слябами, о величине требуемого шага балок. На выходе блока формируются сигналы управ ления приводами механизма загрузки и шагающих балок. Блок 3 имеет сложную структуру, ббеспечивакяцую выпопнение следующих функций: расчёт задания на вепичиSy требуемого хода механизма загрузки в печь по сигналам и ширине загружаемого сляба, о требуемом интервале межд загружаемым и предыдущим слябами и величине освободившегося пространства ва стороне загрузки печи:формирование команды на отрабоЛсу требуемого хода механизма загрузки в печь по сигнапам о наличии свободного пространства jig загрузочной стороне печи для загрузки очередного сляба заданной ширии и об окончании выпопнйемого шага 6anoKj кон троль за отработкой перемещения механи ма загрузки в печь и фс мирование кома цы на возврат механизма загрузки в исходное положение и контроль за отработкой этого перемещения с помсяцью сигнала датчика перемещения механизма загру ки; формирование команды на ход балок по перемещению выгружаемой заготовки на позицию выгрузки П( сигналом о тре- б уемой величине хода. 6anok ( выходному сигналу блока 10) и о расчетной величине требуемого шага балок (по вых ходному сигналу блока ll)f контроль аа перемещением блока с расчетным шагом и формирование команды на возрат бапок исходное положение после выполнения шага и контроль за этим перемещением с помощью сигналов датчика перемещения балок и датчика наличия заготовки в зоне выгрузки. Реализация структуры блока 3 может быть различной в зависимости от используемой для построения элементной базы: устройств аналоговой или дискретной .техники, бесконтактной или релейной логики. Предлагаемое решение содержит блок определения свободного пространства на загрузочном конце печи, задатчик длины шага балок и ряд узлов, позволяющих автоматизировать процесс загрузки печи (так как заявляется не способ загрузки с переменным шагом балок, а конкретное устройство управления загрузкой), что по сравнераю с базовым объектом позволяет укладыва ть и транспортировать спя- &I в печи с заданными минимальными технологическими зазорами, не делая при этом полного шага балок. Имеющий ся в составе устройство блок передачи информации о ширине слябов и интервале между слябами синхронно с продвижением сляба в печи позволяет автоматизрровать процесс загрузки-выгрузки печи. Ожидаемый эффект в результате испо льзования изобретения по сравнению с базовым объектом определяется: уменьшением зазоров между слябами i что приводит при той же производительности печи к уменьшению расхода топлива (газа) либо 1ФВ том же расходе т-оплива - увеличению. производительности печи{ уменьшением количества включений механизма шагания балок, за счёт чего умегалиается расход электроэнергии и время цикла при перемещении очередно1 о сляба на позицию вьггрузки.
фуг.
S ffjcJ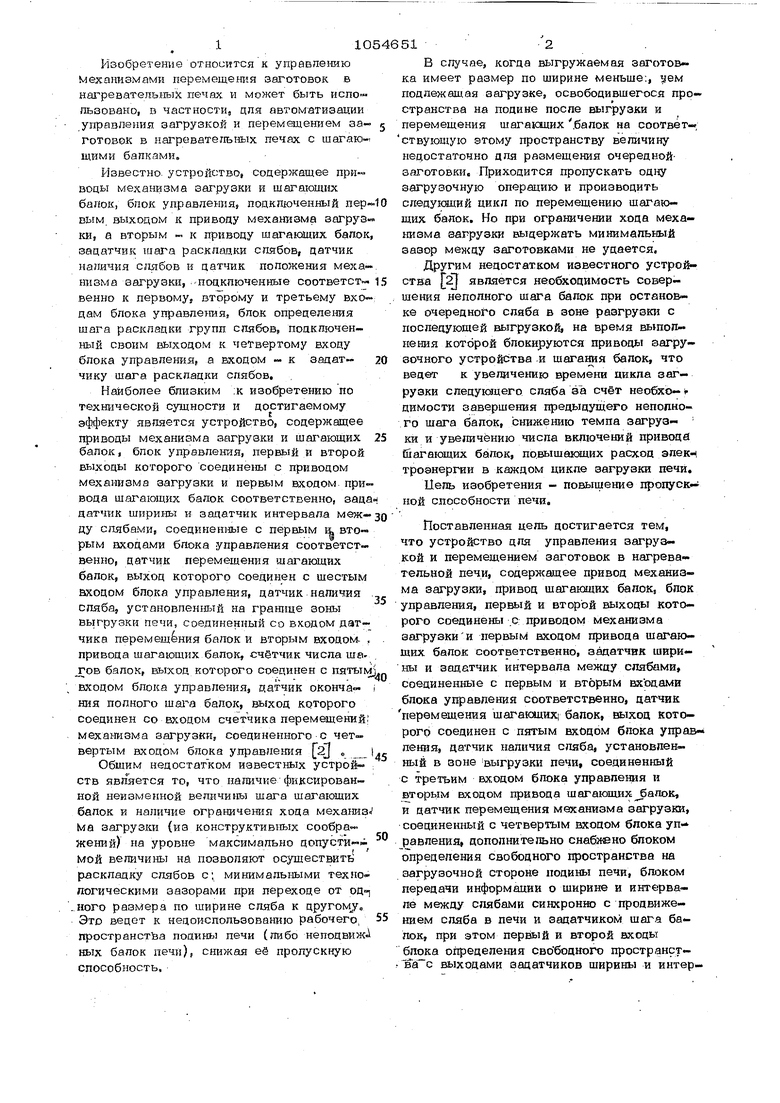

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления загрузкой печи для нагрева заготовок | 1981 |
|
SU1015219A1 |
| Устройство управления загрузкой-разгрузкой и перемещением заготовок в нагревательной печи | 1984 |
|
SU1177631A1 |
| Устройство управления загрузкой печидля НАгРЕВА зАгОТОВОК | 1979 |
|
SU836476A1 |
| Устройство для управления загрузкой печи для нагрева заготовок | 1979 |
|
SU872925A1 |
| Устройство управления загрузкой печи для нагрева заготовок | 1982 |
|
SU1062487A1 |
| Устройство управления загрузкой печи для нагрева заготовок | 1981 |
|
SU1019201A1 |
| Способ управления загрузкой,выгрузкой и перемещением заготовок в печи | 1985 |
|
SU1320631A1 |
| Устройство для управления загрузкой,выгрузкой и перемещением заготовок в нагревательной печи | 1985 |
|
SU1307196A1 |
| Способ управления горизонтальным перемещением шагающих балок в нагревательной печи | 1987 |
|
SU1532788A2 |
| Устройство управления загрузкой печи для нагрева заготовок | 1977 |
|
SU731244A1 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕ НИЯ ЗАГРУЗКОЙ-И ПЕРЕМЕЩЕНИЕМ ЗАГОТОВОК В НАГРЕВАТЕЛЬНОЙ ПЕЧИ, содержэщее привод механизма загрузки, дрввод шагакших башж, блок управления, первый и второй выходы которого соединены с приводом механизма загрузки и первым входом привода шагающих бапок соответственно, зааатчнк ширины и задат- «шк ийтервала между слябами, соединенные с nepjsbTM и вторым входами -блока yi aeneOTfi соответственно датчик перемешениа шагающих балок, выход которого соединен с пятым входом блока управления, датчик наличия сляба, установленный в еоне выгрузки печи, соединенный с третьим входом блока управления и вторым входом привода щагакяцих балок, и датчик перемещения механизма загрузки, соединенный с четвертом .входом блока управления, отличающееся тем, что, с целью повышения пропускной способности печи, оно снабжено блоком определения свободного пространства на загрузочной стороне подины печи, блоком передачи информации о ширине и интервале между слябами синхронно Iч) с продвижением сляба в печи и задатчиком шага балок, при этом первый и второй входы блока определения свободного пространства соединенны с ш 1ходами задатчиков ширины и иетервала между слябами /соответственно, его третий и четвертый входы соединены с датчиками перемещения механизма заг(Л рузки и привода шагающих балок соответственно, а выход соединен с шестым входом блока управления и третьим входом привода шагающих балок, первый и втфой а входы блока передачи ;йн$ мации 6 шириi не сляба и интервала между слябами соединены Еа 1ходами задатчиков ширины и интервала между слябами соответственно, сл выход которого соединен с седьмым вхо4;ь цом блока управления и первым входом О5 вадатчика шага балок, второй вход котосл рого соединен с датчиком нашчия сляба, а выход - с восьмым входом блока управления.
фиг. г
