Изобретение относится к роботехнике, может быть использовано в промышленных роботах и манипуляторах для надежного и быстрого закрепления деталей (заготовок), и является усовершенствованием известного захвата, описанного в авт. св. № 727425.
Цель изобретения - экономия электроэнергии за счет автоматического отключения питания электромагнитов в нерабочем состоянии.
На чертеже схематически изображен захват, обш,ий вид.
Захват содержит связанные с приводом (не показан) губки 1, взаимодействуюш,ие с деталью 2. На рабочей стороне губок 1 закреплены электромагниты 3 и 4. В качестве сердечников электромагнитов 3 и 4 используют либо твердый ферромагнетик или постоянный магнит (например, для листовых заготовок), либо тонкостенный эластичный баллон, заполненный мелкодисперсным веш,еством с добавлением ферромагнитного порошка (например, для объемных заготовок). Выводы обмотки электромагнита 3 подключены непосредственно к источнику 5 постоянного тока, а выводы обмотки электромагнита 4 - через электромагнитное реле 6, связываюш,ее одновременно оба вывода электромагнита 4 с каждым в отдельности полюсом источника 5 питания парами своих контактов 7,8 и 9,10, причем один из контактов 8 и 10 пары замкнутый, а другой 7 и 9 разомкнутый. Один полюс, например
положительный, источника 5 подключен через контакты 11 к обмоткам электромагнита 4. Датчик положения губок содержит геркон 12, расположенный на одной губке,
и постоянный магнит 13, расположенный на другой губке.
Захват работает следуюшим образом. В исходном состоянии перед захватом деталей 2 губки 1 разведены до упора. Геркон 12 расположен вне зоны действия магнита 13, контакты 11 разомкнуты, а питание в цепь электромагнита 4 не подают. С началом сближения губок 1 магнит 13 воздействует на геркон 12, контакты 11 замыкаются, кроме того размыкаются контакты 8 и 10 реле 6, а контакты 7 и 9 того же реле замыкаются. В результате обмотка электромагнита 4 подключается к источнику 5 питания таким образом, что электромагниты 3 и 4 взаимно притягиваются. Происходит захват детали 2, усилие которого
0 представляет собой сумму усилий привода и взаимодействия электромагнитных полей. Для того, чтобы захват опустил деталь 2, контакты 7 и 9 реле размыкаются, а контакты 8 и 10 того же реле 6 замыкаются, в результате чего меняется полярность
обмотки электромагнита 4, и электромагниты 3 и 4 взаимно отталкиваются. Губки 1 расходятся, и с приближением к упору питание электромагнитов разрывается контактами 11 геркона 12. Усилие разжима представляет собой сумму усилий привода и взаимодействия электромагнитных полей.
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват | 1986 |
|
SU1313700A1 |
| Схват манипулятора | 1984 |
|
SU1192970A1 |
| Синхронизированное герконовое реле | 1989 |
|
SU1665423A1 |
| Захватное устройство для промышленного робота-манипулятора | 1983 |
|
SU1126432A1 |
| Стенд для исследования нагруженности деталей ударно-вращательного механизма | 1984 |
|
SU1165558A1 |
| Схват манипулятора | 1984 |
|
SU1206081A1 |
| Электромагнитный схват | 1984 |
|
SU1288055A1 |
| Электромагнитное реле | 1982 |
|
SU999123A1 |
| Учебное пособие "маятник | 1980 |
|
SU896670A1 |
| Оросительная система | 1987 |
|
SU1554826A1 |
ЗАХВАТ по авт. св. № 727425, отличающийся тем, что, с целью экономии электроэнергии, он снабжен магнитоуправляемым датчиком положения губок, контакт которого включен в цепь источника питания. (Л 00 ел сх О5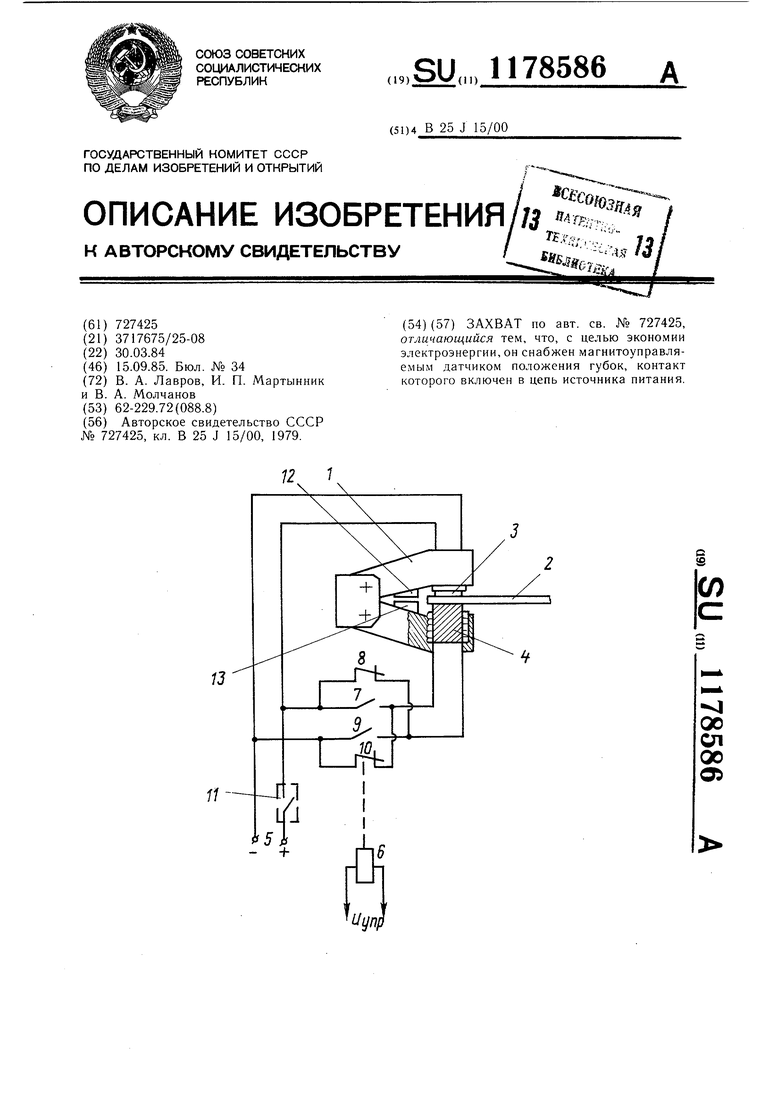
| Захват | 1978 |
|
SU727425A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
