Изобретение относится к автоматике и может найти применение в промышленных роботах и манипуляторах для направленного сброса деталей.
Целью изобретения является расширение функциональных возможностей за счет обеспечения ориентации деталей при освобождении.
На чертеже представлена электрическая схема схвата.
Схват содержит электромагниты 1, подключенные к выходам коммутатора 2 для поочередного включения электромагнитов, к входу которого через блок 3 контактов подключен источник 4 питания.
Коммутатор 2 выполнен на электромагнитных реле 5-7, количество которых соответствует количеству электромагнитов схвата. Реле 5 и 6 содержат соответственно пару нормально разомкнутых контактов 8 и 9, 10 и 11. Контакты 8 и 10 включены в цепь питания соответствующего электромагнита схвата, а контакты 9 и 11 - соответственно в цепь питания электромагнитов реле 6 и 7, обеспечиваюш.их отключение следующих по очереди электромагнитов схвата. Реле 7 служит для отключения последнего электромагнита схвата и содержит нормально разомкнутый контакт 12, включенный в цепь питания последнего электромагнита схвата.
Электромагнит реле 5 подключен к источ нику питания через блок контактов. Для укладки деталей 13 на транспортер 14 служат направляющие 15.
Схват работает следующим образом. В исходном положении контакт блока 3 замкнут и через соответствующие контакты реле 5-7 на электромагниты 1 подано питание. Заготовка притянута к схвату.
После перенесения деталей 13 в зону сброса контакт блока 3 размыкается. При этом в коммутаторе 2 прерывается питание электромагнита реле 5. Контакты 8 размы- каются и первый электромагнит 1 обесточивается. После размыкания контактов 9 обесточивается реле 6. При необходимости, т.е. при быстром отпускании реле 6, оно может быть выполнено с задержкой отпускания.
0
Q
0
5
После размыкания контактов 10 обесточивается второй электромагнит 1, затем аналогично обесточивается третий электромагнит 1. Такое поочередное обесточива- ние электромагнитов схвата обеспечивает направленное падение под действием силы тяжести деталей 13, которая соответственно укладывается по направляющей 15 в транспортер 14, который перемещает ее к месту последующей обработки.
При изменении очередности отключения электромагнитов 1, например, через контакт блока 3 деталь падает другим торцом вперед (показано пунктиром).
При различном расположении электромагнитов 1 (в углах прямоугольника по окружности и т.д.) использование коммутатора для поочередного включения электромагнитов по заданной программе позволяет ре- щать задачи ориентирования при захвате и сбросе без сложных электромеханических устройств. В зависимости от сложности реща- емой задачи коммутатор может быть выполнен на кольцевом регистре сдвига или шаговом искателе.
При этом перепрограммирование сброса может осуществляться соответствующей перекоммутацией электромагнитов через усилитель к разрядам регистра или к контактным группам шагового искателя.
Аналогичным образом возможно поочередное включение электромагнитов при захвате детали, например, при отделении ее от стопы.
Формула изобретения
Электромагнитный схват, содержащий электромагниты, имеющие обмотки и с ердеч- ники, причем сердечники установлены на основании, а обмотки связаны через блок контактов с источником питания, отличающийся тем, что, с целью расщирения функциональных возможностей путем обспече- ния ориентации детали при ее освобождении, он снабжен коммутатором для поочередного включения-отключения электромагнитов, причем вход коммутатора соединен с блоком контактов, а выход - с обмотками электромагнитов.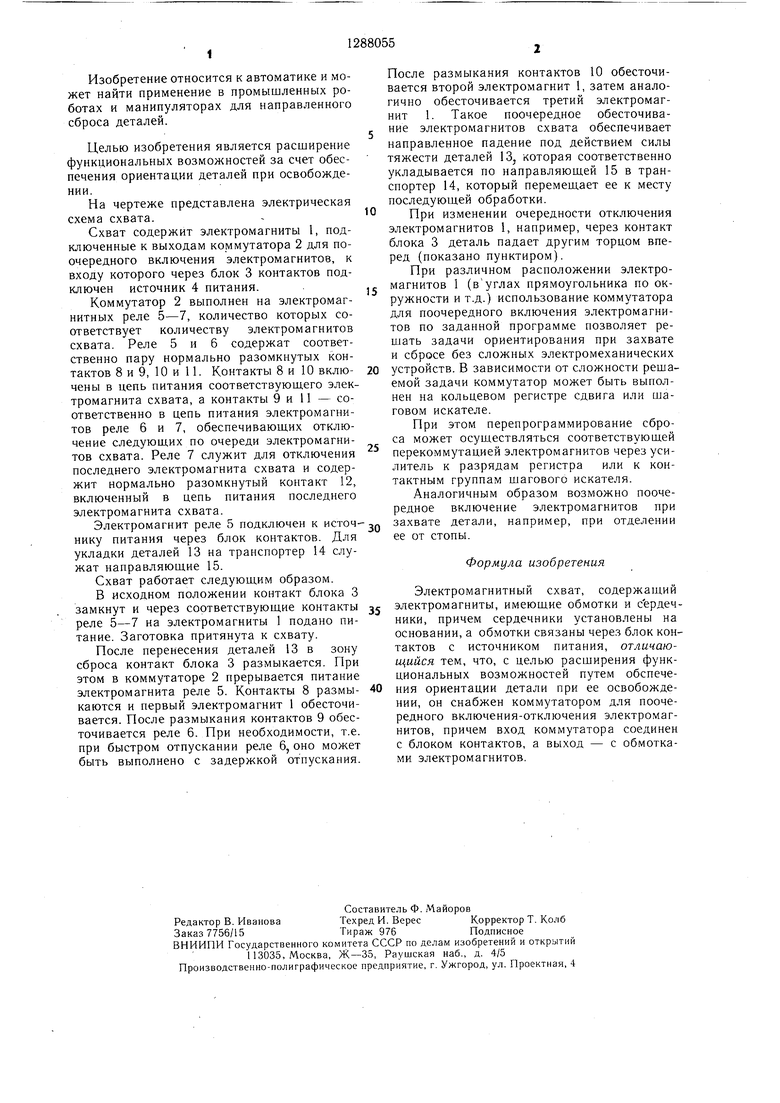
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват | 1986 |
|
SU1313700A1 |
| УСТРОЙСТВО для ПРОГРАММНОГО УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ КРАСИЛЬНОГО | 1967 |
|
SU190460A1 |
| Электромагнитный схват | 1983 |
|
SU1168402A1 |
| Захват | 1984 |
|
SU1178586A2 |
| Захватное устройство для промышленного робота-манипулятора | 1983 |
|
SU1126432A1 |
| Автоматическое устройство для установки вала в отверстие | 1983 |
|
SU1090521A2 |
| Схват манипулятора | 1980 |
|
SU965765A1 |
| Электромагнитный захват | 1979 |
|
SU918090A1 |
| Устройство для контроля параметров электро- и радиотехнических деталей | 1960 |
|
SU133521A1 |
| Промышленный робот | 1977 |
|
SU738864A1 |
Изобретение относится к автоматике и может найти применение в промышленных роботах и манипуляторах для направленного сброса деталей. Целью изобретения является расширение функциональных возможностей за счет обеспечения ориентации деталей при освобождении. В исходном положении контакт блока 3 замкнут и через контакты 8, 10, 12 коммутатора 2 на электромагниты 1 подводится напряжение, что приводит к захвату детали 13. После переноса детали 13 в зону сброса контакт блока 3 размыкается, что приводит к последовательному отключению электромагнитов 1, обеспечиваюшему требуемую ориентацию детали 13 .при ее отрыве. 1 ил. $ сл N5 00 00 о сд сд -I1 Ыгй -Ф
| Манипулятор для захватывания ферромагнитных деталей | 1981 |
|
SU975393A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
