Изобретение относится к машиностроению и может быть использовано в схватах промьпиленных роботов и манипуляторов.
Цель изобретения - расширение функциональных возможностей схвата за счет обеспечения возможности определения усилия захвата и расширения ассортимента захватываемых объектов путем вьтолнения на губках схвата двух дополнительных полостей.
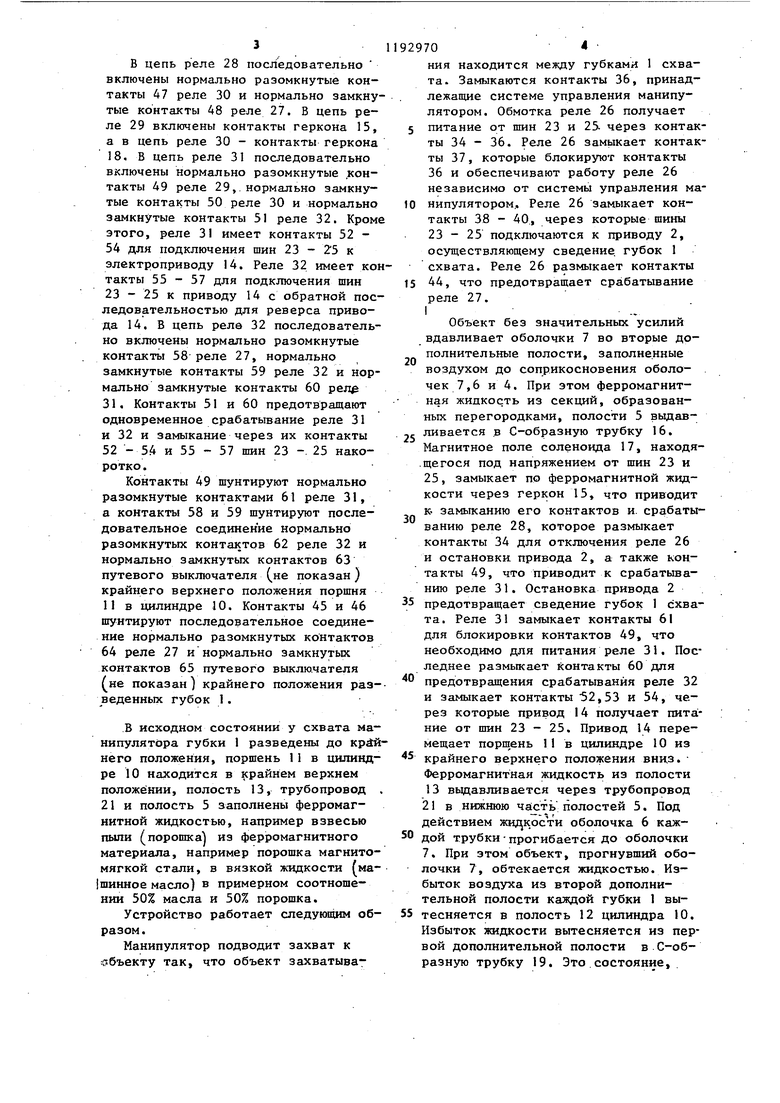
На фиг.1 изображен предлагаемый рхват, общий вид; на фиг.2 - разрез А-А на фиг,1; на фиг.3 - схема управления схватом.
Схват содержит губки 1 с приводом 2 их перемещения, каждая из которых состоит из корпуса 3 .и оболочки 4 из эластичного материала, образующих полость 5, и дополнительных оболочек 6 и 7 из эластичного материала, расположенных последовательно над оболочкой 4 и связанных с корпусом 3, с образованием двух дополнительных полостей, первой - между оболочкой 4 и дополнительной оболочкой 6, и второй -между дополнительными оболочками 6 и 7, при этом полость 5 каждой губки .разделена перегородками 8 на секции, сообщающиеся между собой, а на корпусе 3 каждой губки 1 установлена электромагнитная обмотка 9.
Кроме того, схват содержит цилиндр 10 с поршнем 11, делящим его на две полости 12 и 13 и связанным с приводом 14 его перемещения, два датчика уровня ферромагнитной жидкости, заполняющей полости 5 губок 1 и полость 13 цилиндра. .
Первый датчик уровня ферромагнит-ной жидкости выполнен в виде геркона 15, С-образной трубки 16, обхватывающей геркон и связывающей сообщающиеся между собой полости 5 с полостью 12 цилиндра 10 и солено1еда 17, установленного на средней части трубки 16
Второй датчик выполнен в виде геркона 18, С-образной трубки 19, обхватывающей геркон и связывающей одну из первых дополнительных полостей губок 1 с полостью 12 цилиндра 10, и соленоида 20, установленного на средней части .трубки 19.
Первые дополнительные полости губок 1 С помощью трубопровода 21 сообщаются с полостью 13 цилиндра 10, а вторые дополнительные полости гу- ; бок 1 с помощью трубопровода 22 сооб,
щаются между собой и с полостью 12 цилиндра 10.
CxiSMa управления схватом получает питание от трех шин 23 - 25 трехфазной сети. При этом от разности потенциалов между шинами 23 и 25 получают питание обмотки реле пускателя 26 включения привода 2 губок 1, реле пускателя 27 включения реверса привода 2 при разведении губок 1 для отпускания объекта, реле 28 для включения электромагнитных обмоток 9, реле 29, включе 1ного через контакт геркона 15 датчика уровня, реле 30, включенного через контакт геркона 18, второго датчика уровня, соленоида 17 первого датчика уровня И соленоида 20 второго датчика уровня, электромагнитного пускателя реле 31 привода 14 поршня 11, пускателя- реле 32 реверса привода 14. От шин 23 --25 получают питание электромагнитные обмотки 9 через нормально разомкнутые контакты 33, принадлежащие реле 28.
В цепь реле 26 последовательно включены нop aльнo замкнутые контак- ты 34 реле 29 и контакты 35 реле 27, а также нормально разомкнутые контакты 36. для включения реле 26. Контакты 36 шунтированы нормально разомкнутыми контактами 37 реле 26 (команда схвата. Кроме этого, реле 26 имеет нормально разомкнутые контакты 38,39 и 40 для подключения шин 23,24 и 25 соответственно к электроприводу 2. В свою очередь, реле 27 имеет нормально разомкнутые контакты 41. - 43 для подключения шин 23 25 в обратной последовательности к электроприводу 2 для его реверса. В цепь реле 27 последовательно включены нормально замкнутые контакты 44 реле 26 и нормально замкнутые контакты 45 реле 27, а также нормально .разомкнутые контакты 46 для включения реле 27 у команд а освобождения . Контакт 37 обеспечивает работу реле 26 на протяжении всего времени циклов работы захвата при фиксировании объекта, независимо от времени поступления управляющих сигналов на контакт 36. Контакты 35 и 44 предотвращают одновременное срабатывание реле 26 и 27, что предотвращает короткое замыкание шин 23 - 25 через контакты 38 - 40 i, и 41 - 43.
3.
в цепь реле 28 последовательно включены нормально разомкнутые контакты 47 реле 30 и нормально замкнутые контакты 48 реле 27. В цепь реле 29 включены контакты геркона 15, а в цепь реле 30 - контакты геркона 18. В цепь реле 31 последовательно включены нормально разомкнутые контакты 49 реле 29,.нормально замкнутые контакты 50 реле 30 и нормально замкнутые контакты 51 реле 32. Кром этого, реле 31 имеет контакты 52 54 для подключения шин 23 - 25 к электроприводу 14. Реле 32 имеет котакты 55 - 57 для подключения шин 23 - 25 к приводу 14 с обратной последовательностью для реверса привода 14. В цепь реле 32 последовательно включены нормально разомкнутые контакты 58 реле 27, нормально замкнутые контакты 59 реле 32 и нормально замкнутые контакты 60 релэ 31. Контакты 51 и 60 предотвращают одновременное срабатывание реле 31 к 32 и замыкание через их контакты 52 - 54 и 55 - 57 шин 23 -. 25 накоротко.
Контакты 49 шунтируют нормально разомкнутые контактами 61 реле 31, а контакты 58 и 59 шунтируют последовательное соединение нормально разомкнутых контактов 62 реле 32 и нормально замкнутых контактов 63 путевого выключателя (не показан) крайнего верхнего положения поршня 11 в цилиндре 10. Контакты 45 и 46 шунтируют последовательное соединение нормально разомкнутых контактов 64 реле 27 и нормально замкнутых контактов 65 путевого выключателя (не показан) крайнего положения разведенных губок I.
.В исходном состоянии у схвата манипулятора губки 1 разведены до крайнего положения, поршень 11 в цилиндре 10 находится в крайнем верхнем положении, полость 13, трубопровод 21 и полость 5 заполнены ферромагнитной жидкостью, например взвесью пыли (порошка из ферромагнитного материала, например порошка магнитомягкой стали, в вязкой жидкости (ма шинное масло) в примерном соотношении 50% масла и 50% порошка.
Устройство работает следующим образом.
Манипулятор подводит захват к объекту так, что объект захватыва92970
ния находится между губками 1 схвата. Замыкаются контакты 36, принадлежащие системе управления манипулятором. Обмотка реле 26 получает 5 питание от шин 23 и 25- через контакты 34 - 36. Реле 26 замыкает контакты 37, которые блокируют контакты 36 и обеспечивают работу реле 26 независимо от системы управления манипулятором,. Реле 26 замыкает контакты 38 - 40., через которые шины 23 - 25 подключаются к приводу 2, осуществляющему сведение, губок 1 схвата. Реле 26 размыкает контакты 15 44, что предотвращает срабатывание реле 27.
IОбъект без значительных усилий
вдавливает оболочки 7 во вторые дополнительные полости, заполненные
20 воздухом до соприкосновения оболочек 7,6 и 4. При этом ферромагнитная жидкость из секций, образованных перегородками, полости 5 выдавливается в С-образную трубку 16,
25 Магнитное поле соленоида 17, находя.щегося под напряжением от шин 23 и 25, замыкает по ферромагнитной жидкости через геркон 15, что приводит к замыканию его контактов и. срабаты30ванию реле 28, которое размыкает контакты 34 для отключения реле 26 и остановки привода 2, а также контакты 49, что приводит к срабатыванию реле 31. Остановка привода 2
35 предотвращает сведение губок 1 схвата. Реле 31 замыкает контакты 61 для блокировки контактов 49, что необходимо для питания реле 31, Последнее размыкает Контакты 60 для
предотвращения срабатывания реле 32 и замыкает контакты 52,53 и 54, через которые привод 14 получает питание от шин 23 - 25. Привод 14 перемещает порш,ень 11 в цилиндре 10 из
крайнего верхнего положения вниз. Ферромагнитная жидкость из полости 13 выдавливается через трубопровод 21 в нижнюю полостей 5. Под действием .ости оболочка 6 каж50 дои трубки - прогибается до оболочки 7. При этом объект, прогнувший оболочки 7, обтекается жидкостью. Избыток воздуха из второй дополнительной полости каждой губки 1 вытесняется в полость 12 цилиндра 10. Избыток жидкости вытесняется из первой дополнительной полости в С-образную трубку 19. Это состояние. 1 при котором первые дополнительные полости обеих губок заполнены полостью. Ферромагнитная жидкость в колене, трубки 19 замыкает магнитный поток соленоида 20 через геркон 18, укоторьш включает реле 30. Последнее размыкает контакт 50 и отключает ре ле 3 1 , которое размыкает контакты 52-54 и останавливает привод J4. Заполнение губок захвата жидкостью прекращается. Реле 30 замы1сает контакты 47 дпя- включения реле 28. Непосредственно реле 28 замыкает контакты 33 и подключает электромагнитные обмотки 9 к шинам 23.- 25. Обмотки 9 .в губках 1 схвата создают магнитное поле, что вызывает твердение ферромагнитной жидкости в полостях губок 1. При этом форма затвердевшей ЖИДКО.СТИ повторяет форму объекта, занявшего свое место в полостях губок, что обеспечивает относительно большую поверхность соприкосновения -затвердевших губок 1 и объекта. Это приводит к относительно малому удельному давлению объекта на поверхности губок 1. После завершения операции транспортировки объекта манипулятором на установочное место замыкается контакт 46 системы управления манипулятором и срабатывает реле 27, которое размыкает контакты 35 для предотвращения случайного срабатывания реле 26, размыкает контакты 45 для отключения от системы управления манипулятором, а именно от контактов 46, замыкает контакты 47 для обеспечения работы реле 27 на протяжении вса ГО данного цикла работы манипулятора 06 размыкает к.онтакты 48 для отключения обмоток 9 и для разжижения жидкости в губках 1 через реле 28 с контактами 33, а также замыкания контактов 41 - 43 для реверса привода 2 и разведения губок 1 схвата. Кроме этого, реле 27 замыкает контакты 58 для включения реле 32, которое, в свою очередь, размыкает контакты 59 для отключения от контактов 58, замыкает контакты 62 для обеспечения работы реле 32 на протяжении всего данного цикла работы размыкает контакты 51 для предотвращения случайного включения реле 31 и замыкает контакты 55 - 57 для реверса привода 14 и возврата жидкости из полостей 5 через трубопровод 21 в полость 13 цилиндра 10 под действием поршня 11 с приводом 14. Воздух из полости 12 цилиндра 10 возвращается во вторые дополнительные полости губок 1 через трубопровод 22. Таким образом, объект полностью освобожден от взаимодействия со схватом. Губки 1 раздвигаются приводом 2 до крайнего положения, где срабатытвает путевой выключатель с контактами 48, размыкающими цепь питания реле 27, которое размыкает контакты 41 - 43 для остановки привода 2, Поршень 11 под воздействием привода 14 доходит до крайнего верхнего положения, где срабатывает путевой выключатель с контактами 63, которые размыкают цепь питания реле 32 для отключения привода 14 при размыкании контактов 55 - 57 реле 32. Таким образом, схват манипулятора приходит в исходное состояние.
Г1
Ч11т

| название | год | авторы | номер документа |
|---|---|---|---|
| Схват | 1986 |
|
SU1313700A1 |
| Центрирующий схват | 1985 |
|
SU1283093A1 |
| Захват | 1984 |
|
SU1178586A2 |
| Схват очувствленного робота | 1984 |
|
SU1227464A1 |
| Захват манипулятора | 1990 |
|
SU1779582A1 |
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2022 |
|
RU2794243C1 |
| Устройство управления схватом манипулятора | 1987 |
|
SU1442395A2 |
| Схват манипулятора | 1984 |
|
SU1206081A1 |
| Устройство управления схватом манипулятора | 1985 |
|
SU1337250A1 |
| ЭЛЕКТРОМАГНИТНОЕ РЕЛЕ | 1972 |
|
SU331438A1 |

1. ОХВАТ МАНИПУЛЯТОРА, содержащий две губки с приводом их перемещения, каждая нз которых состоит из корпуса и оболочки из эластичного материала, образующих полость с ферромагнитным .наполнителем, и из установленной на корпусе электромагнитной обмотки, отличающийс я тем, что, с целью расширения функциональных возможностей за счет обеспечения возможности определения усилия захвата и расширения ассортимента захватываемых объектов, он снабжен цилиндром с поршнем, одна из полостей которого заполнена ферромагнитным наполнителем, приводом перемещения поршня, двумя датчиками уровня ферромагнитного наполнителя, при этом каждая губка снабжена двумя дополнительными эластичными оболочками, расположенными последовательно над основной оболочкой и связанными по краям с корпусом с образованием двух дополнительных полостей, первой, образованной между основной и дополнительной оболочками, и второй, образованной меящу этими дополнительными оболочками, а в качестве наполнителя использована ферромагнитная жидкость, при этом пслость цилиндра, заполненная ферро о магнитной жидкостью, сообщается с (О первой дополнительной полостью каждой губки, а одна из них через датчик уровня - с другой полостью цилиндра , которая также сообщается с второй дополнительной полостью каждой губки, основные полости губок сообщаются между собой, а через второй датчик уровня - с полостью цилиндра , не имеющей наполнителя. 2. Схват поп.1,отличающ и и с я тем, что основная полость каждой губки разделена на секции, сообщаквдиеся между собой.
23
38
| Захват | 1977 |
|
SU629058A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
