Изобретение относится к машиностроению и может найти применение в промышленных роботах и манипуляторах для надежного и быстрого закрепления деталей заготовок и определения их размера в процессе обработки в системах гибкой автома- изации.
Цель изобретения - расширение функциональных возмшцн99 й путем определения размеров 5 11ЬУтываёмых объектов.
На чертел .ив.обрчжеяы. схват (обш,ий вид) и Схема его упр авле ния.
Схва т соде ржит рычаги 1, воздействую- ш,ие на детал.ь 2-через губки 3. На внутренней стороне рычагов 1 расположены на одном рычаге обмотка с катушкой 4 электромагнита, а на противоположном рычаге - якорь 5 электромагнита с возможностью перемепдения в полости катушки 4. Выводы обмотки катушки 4 электромагнита через контакть 6 и 7 и контакты 8 и 9 (например, нормально замкнутые) реле 10 подключены через датчик 11 тока к источнику 12 переменного напряжения. Нормально разомкнутые контакты 13 и 14 реле 10 подключены к источнику 15 постоянного тока, датчик 11 тока подключен к входу схемы 16 сравнения, два из трех выхода которой подключены через схему ИЛИ 17, и контакты 18 и 19 (нормально разомкнутые) второго реле 20 с задержкой времени срабатывания подключены к обмотке реле 10, третья пара контактов 21 и 22 реле 10 подключена между об.моткой реле 10 и шиной 23 управляющего сигнала, подключенной к выходу блока 24 управления, входу управления привода 25 и через вторую пару контактов 26 и 27 (нормально разомкнутых) - к синхронизирующему входу блока 24.
Устройство работает следующим образом.
В исходном положении перед захватом детали 2 при помощи рычагов 1 губки 3 разведены. Обмотка катушки 4 электромагнита подключена через контакты 7, 9 и 6, 8 к датчику 11 тока и источнику 12 переменного тока.
Через шину 23 с блока 24 подается сигнал на привод 25. Последний воздействует на рычаги, и губки 3 сжимают деталь 2 до упора. При этом находящийся в начале полости катушки 4 якорь 5 перемещается на соответствующее расстояние к середине катушки 4, изменяя ее сопротивление переменному току. Установившееся значение тока при упоре губок 3 в деталь 2 измеряемое датчиком 11, определяется размером детали 2. Через определенное время, достаточное для захвата детали 2, сраСоставитель Ф. Майоров
Редактор С. ЛисинаТехред И. ВересКорректор М. Пожо
Заказ 2169/17Тираж 954Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
П3035, Москва, Ж-35. Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
батывает реле 20, выполненное с задержкой времени на срабатывание, и через его замкнувшиеся контакты 18, 19 реле 10 подключается к схеме 16 сравнения через схему
ИЛИ 17.
При соответствии детали эталонному значению или при меньшем заданного значения с второго или первого выходов схемы 16 соответственно через схему ИЛИ 17 сиг„ нал подается на обмотку реле 10. При помощи контактов 21, 22 реле 10 самоблокируется, а контакты 6 и 7 замыкаются соответственно с контактами 14 и 13 и в обмотку катушки 4 электромагнита подается постоянный ток от источника 15. При этом
5 усилие якоря 5, втягивающегося в катушку 4, суммируется с усилием привода 25, воздействующего на рычаги 1, и деталь 2 зажимается дополнительным усилием.
В соответствии с сигналом с первого или второго выходов схемы 16 сравнения
0
по синхронизирующему сигналу контактов
26 и 27 реле 20 включается соответствую- П1ая программа в блоке 24, согласно которой схват с деталью перемещается к кассете с браком (если деталь меньше задан5 ного значения), или к кассете с годными деталя.ми (при равенстве ее размеров эталонному значению).
При наличии сигнала на третьем выходе схемы 16, соответствующего размерам детали, больщим эталонного значения, сигнал на
0 шине 23 прерывается и устройство приходит в исходное состояние, т. е. деталь не захватывается, а включается программа для ее повторной обработки. Для отпускания детали т. е. для приведения устройства в исходное состояние, сигнал с шины 23 снимается,
5 реле 20 и 10 обесточиваются.
Формула изобретения
Схват, содержаил.ий связанные посредством рычагов губки, электромагнит и электромагнитное реле, одна пара контактов которого подключена к источнику постоянного тока, отличающийся тем, что, с целью расширения функциональных возможностей за счет определения размеров захватываемых
объектов, он снабжен источником переменного тока, датчиком тока, включенным последовательно с источником переменного напряжения, а электромагнит выполнен в виде соленоида с якорем, при этом источник переменного напряжения и датчик тока подключены к обмотке электромагнита через вторую пару контактов электромагнитного реле, а электромагнит и его якорь расположены на противоположных рычагах губок.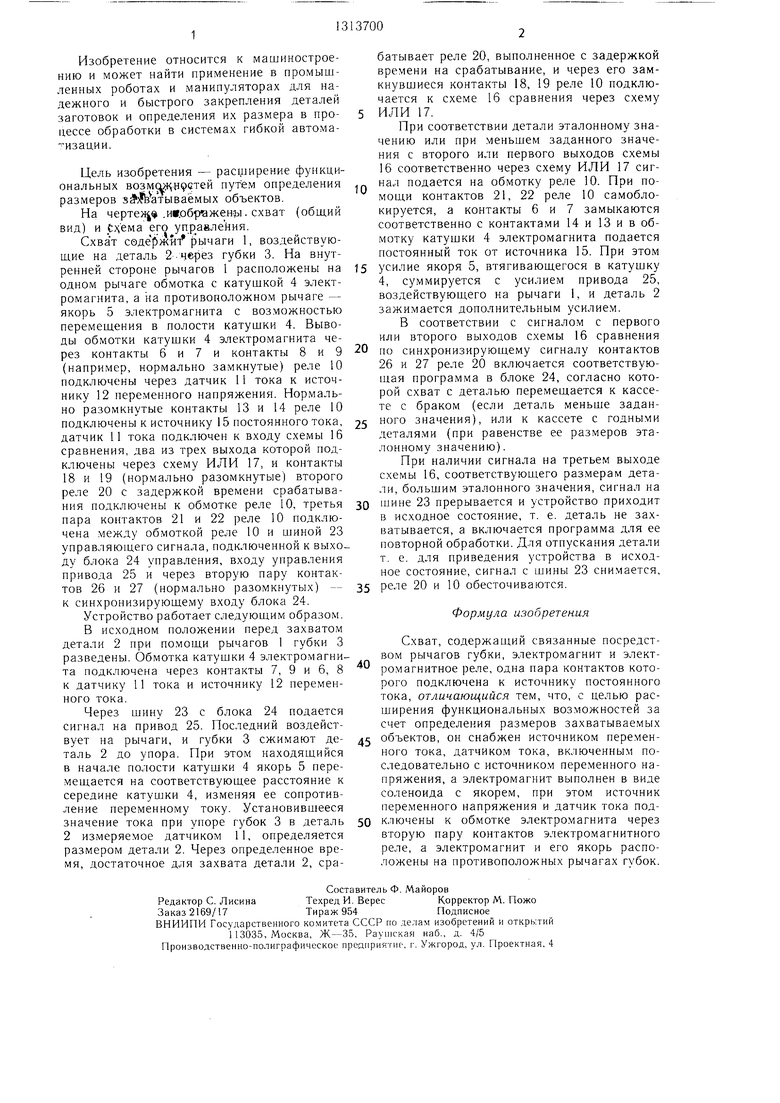
| название | год | авторы | номер документа |
|---|---|---|---|
| Электромагнитный схват | 1984 |
|
SU1288055A1 |
| Захват | 1984 |
|
SU1178586A2 |
| Схват промышленного робота | 1986 |
|
SU1433792A1 |
| Схват промышленного робота | 1984 |
|
SU1248796A2 |
| Самоцентрирующий люнет | 1979 |
|
SU856738A1 |
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2378102C2 |
| Схват промышленного робота | 1983 |
|
SU1140945A1 |
| Электромагнитный схват | 1984 |
|
SU1172699A1 |
| Схват манипулятора | 1984 |
|
SU1192970A1 |
| Электромагнитный схват | 1990 |
|
SU1798187A1 |
Изобретение относится к машинострое нию и может найти применение в промышленных роботах и манипуляторах для надежного и быстрого закрепления деталей заготовок и определения их размера в процессе обработки в системах гибкой автоматизации. Целью изобретения является расширение функциональных возможностей за счет определения размеров захватываемых объектов. При сведении губок 3 и захвате детали 2 якорь 5 электромагнита перемешается в его катуп ке 4, изменяя ее сопротивление переменному току, величина которого измеряется датчиком 11 тока, включенным последовательно с источником 12 переменного напряжения. По величине тока определяют положение губок 3 и, следовательно, размер захваченной детали. Затем, если размер детали соответствует заданному, обмотка катушки 4 подключается к источнику 15 постоянного тока и электро- .магнит создает втягивающее якорь 5 усилие, которое способствует удержанию захваченной детали. 1 ил. сл оо оо о о
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
