1
Изобретение относится к измерительной технике контроля процесса плавки в черной металлургии и может быть использовано в системах контроля и управления положением кислородной фурмы.
Цель изоб1)етения - повышение точности контроля и положения кислородной фурмы путем повьшения точности ввода коррекции и считывания информации ЭВМ.
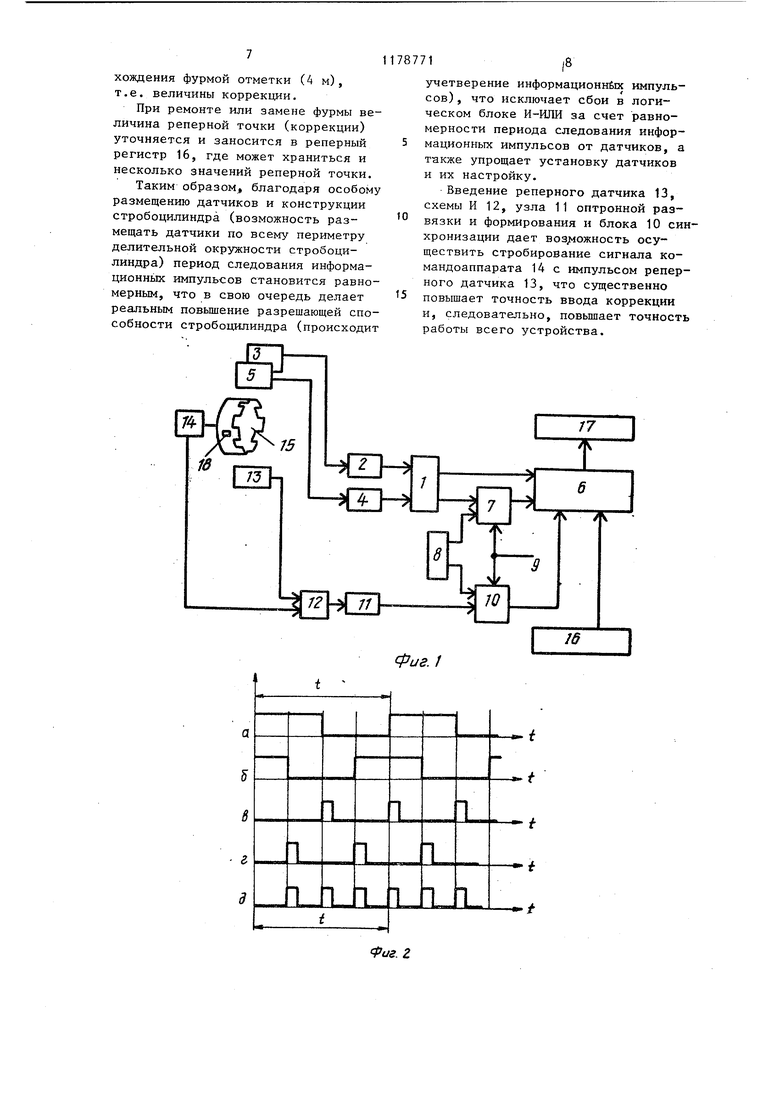
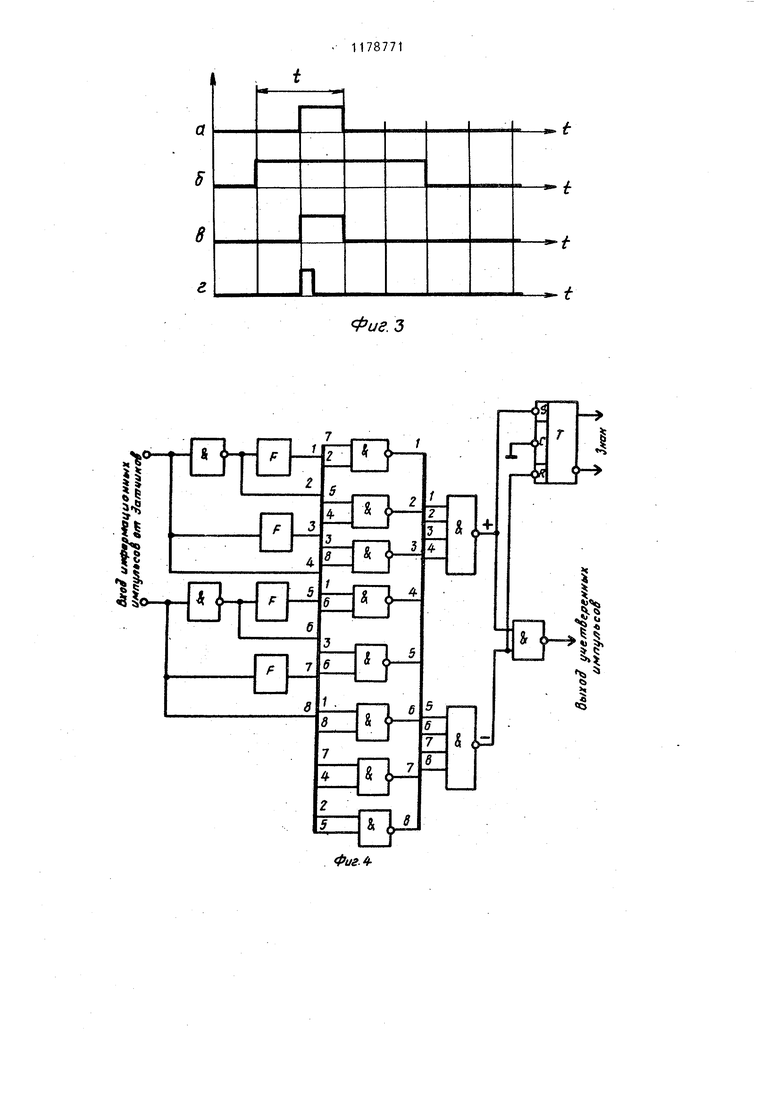
В устройстве осуществляется раздельная синхронизация информационных импульсов счета от датчиков угловых перемещений фурмы и импульсов реперного датчика, исключающая этим самым совпадения моментор в счетчике при одновременном вводе коррекции и подсчете информационных импульсов, а также запоминание в блоках синхронизации информации от датчиков и запрет ее на прохождение к счетчику в теченце времени прихода импульса Опрос от локальной системы или от ЭВМ, что исключает считывание искаженной информации с выхода счетчика, вызванной переходными процессами в нем. Стробирование сигнала с выхода реперного датчика (импульс меньшей длительности) с . сигналом (импульс большей длительности) командоаппарата повьшает точность ввода коррекции, причем командоаппарат размещен в одном корпусе с датчиками и механически связан с осью стробоцилиндра, а прямозубное колесо выполнено в виде стробоцилиндра, что исключает влияние люфтов и биений оси стробоцилиндра на длительность и период с следования импульсов от датчиков. На фиг. 1 представлена функхщональная схема устройства; на фиг. 2 и 3 - временные диаграммы, иллюстрирующие работу устройства; на фиг. 4 - схема логического блока И-ИЛИ; на фиг. 5 - схема блоков i синхронизации.
Устройство цифрового контроля положения кислородной фурмы содержит логический блок И-ИЛИ 1, первый вход которого соединен с выходом первого узла 2 оптррнной развязки и формирования сигнала, вход которого соединен с выходом первого датчика 3 углового перемещения, второй вход логического блока И-ИЛИ 1 сое712
динен с выходом второго узла 4 оптронной развязки и формирования сигнала, вход которого соединен с выходом второго датчика 5 углового перемещения, а-реверсньм выход логического блока И-ИЛИ 1 соединен с входом Реверс счетчика 6, а счётный выход логического блока И-ИЛИ 1 соединен с первым входом
первого блока 7 синхронизации, выход которого соединен со счетным входом счетчика 6, второй вход первого блока синхронизации соединен с первым выходом генератора 8 тактовьк импульсов, третий вход первого блока 7 синхронизации соединен общей точкой с входной шиной Опрос 9 и первьм входом второго блока 10 синхронизации, второй
вход которого соединен с вторым выходом генератора 8 тактовых импульсов, третий вход второго блока 10 синхронизации соединен с выходом третьего узла 11 оптронной развязки и формирования сигнала,
вход которого соединен с выходом схемы И 12, первый вход которой соединен с выходом реперного датчика 13, второй вход схемы И 12 соединен с выходом командоаппарата 14, вход которого механически связан с осью стробоцилиндра 15, а выход второго блока 10 синхронизации соединен с входом Запись числа счетчика 6, вход Ввод числа которого соединен с выходом реперного регистра 16, а выход счетчика 4 соединен с входом блока 17 связи с ЭВМ.
Прямозубное колесо выполнено в в виде стробоцилиндра 15, на котором прорезаны прямоугольные щели и счетные зубья. Это позволяет получить (сформировать) импульсы с
равномерным периодом следования, за счет чего упрощается установка датчиков и их настройка, что нельзя получить, используя в прототипе зубчатое колесо, особенно при малом
диаметре; вьшолняя зубья прямоугольными, щели получаются трапецеидальной формы, что снижает надежность и точность работы устройства, усложняет установку и откладку датчиков в производственных условиях.
Для реперного датчика 13 на стробрцилиндре 15 прорезана одна щель 18 таким образом, чтобы при одном
обороте стробоцилиндра 15 реперный датчик 13 выдавал один информационный импульс. С другой стороны замена зубчатого колеса стробоцилиндром позволяет размещать датчики углового перемещения и реперный датчик по всему периметру делительной окружности стробоцилиндра. Зубья и щели на стробоцилиндре равны между собой, что делает шаг зубьев t const, и размещение датчиков угловых перемещений может быть любым при выполнении условия. Nt-b;, где N - количество шагов между датчиками угловых перемещений, которое представляет собой целое положительное число, а в частном случае .может быть равно нулю.
Величина -|- соответствует тому значению при котором увеличивается размещающая способность стробоцилиндра в 4 раза и которое дает равномерный период следования рабочих импульсов и существленно упрощает установку датчиков и настройку устройства, а также повьшает точность работы логического блока И-ИЛ 1 (при учетверении входного сигнала) .
Третий датчик 13 реперной точки может устанавливаться (от датчиков угловых перемещений) по всему периметру делительной окружности стробоцилиндра на угловом расстоянии Nt + г + К, где величина К 4
выбирается в пределах а
t
Q - граница, определяемая минимально допустимым временем разделения реперного импульса (репернрг датчика) и информационных импульсов счета (датчиков угловых перемещений) .
Устройство работает следующим образом.
Каждый датчик 3, 5 и 13 представляет собой пару, состоящую из светодиода инфракрасного излучения и кремниевого фотодиода, между которыми находятся щели стробоцилиндра 15. При вращении стробоцилиндра 15 происходит модуляция инфракрасного излучения. Модулированный поток засвечивает кремниевые фотодиоды. Сигналы с выходов датчиков 3 и 5 поступают на входы узлов 2 и 4 оптронной развязки и формирования, где происходит гальваническая развязка и формирование прямоугольных импульсов с помощью тригге ров Шмитта (см. фиг. 2 а,б). На каждом фронте прямоугольных импульсов (фиг. 2 а,б) формируются рабочие информационные) импульсы счета положения кислородной фурмы (фиг. 2 в, г), которые поступают на
входы логического блока И-ИЛИ 1, где учетверяются (о.бъединяются) (см. фиг.4) и на его выходе образуются четыре рабочих импульса (фиг. 2д) при перемещении стробоцилиндра 15 на один шаг t.
Следовательно, с импульсного выхода логического блока И-ИЛИ 1 при единичном перемещении стробоцилиндра 15 снимается четыре рабочих импульса, которые, пройдя блок 7 синхронизации,где они синхроршзируются с импульсами генератора 8 тактовой частоты,поступают на счетный вход счетчика 6.
В логическом блоке И-ИЛИ 1 также определяется знак (направление) вращения стробоцилиндра 15. Знаковый сигнал с реверсивного выхода логического блока И-ИЛИ 1 поступает
на вход Реверс. счетчика 6.
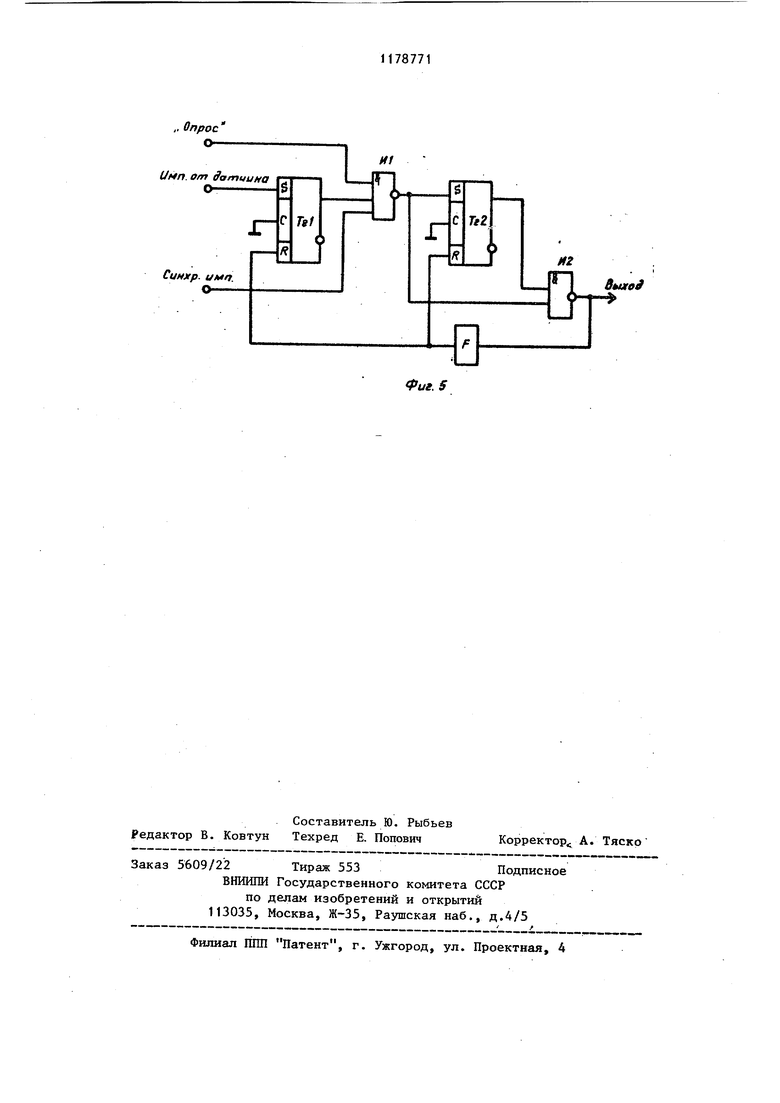
Блоки 7 и 10 синхронизации (см. фиг. 5) предназначены для разделения во времени импульсов счета, идущих с импульсного выхода логического блока ИНШИ 1, и реперных импульсов ввода коррекции, образованных на выходе третьего узла 11 оптронной развязки и формирования сигнала, которые подводятся к счетчику 6. Такое разделение происходит благодаря синхронизации импульсов счета и реперныхимпульсов в блоках 7 и 10 синхронизации с импульсами генератора тактовой частоты, смещенных друг относительно друга во времени.
Блок (7, 10) синхронизации работает следующим образом (см.фиг.5). Информационный импульс о положении
фурмы устанавливает первый триггер (Тг1) в единичное состояние, . единичный выход которого через первую схему (и 1) пропускает синхроимпульс от генератора тактовых импульсов 8, который переводит второй триггер (Тг2) также в единичное состояние, единичный выход которого через вторую схему (И 2)
пропускает следующий импульс синхронизации на выход блока синхронизации, который через задержку F устанавливает в нулевое (исходное) состояние первый и второй триггеры. Далее цикл повторяется.
При считывании информации локальной системой или ЭВМ на первую схему И блока синхронизации (см.фиг,5) поступает сигнал Опрос, который зпрещает дальнейшее прохождение синхроимпульсов от генератора 8 тактовых импульсов через первую схему И, при единичном состоянии первого триггера, который запоминает информационный импульс о положении фурмы,, исключая тем самым потерю информации при считывании. После окончания сигнала Опрос открывается первая схема И и синхроj импульс от генератора тактовых импульсов проходит далее аналогично вышесказанному.
Счетчик 6 подсчитывает информационные импульсы в виде параллельного двоично-десятичного кода, который по сигналу от входной шины Опрос 9 считывается-ЭВМ.
Командоаппарат 14 в устройстве размещен в герметичном корпусе датчиков, выполнен с большой степенью точности и малогабаритен. Размеры корпуса датчика 180X180X120 мм. Конструктивно Командоаппарат 14 состоит из двух шестерен; роль малой шестерни играет ось стробоцилиндра, на конце которой нарезаны зубья. Большая шестерня входит в зацепление с малой шестерней. Передаточное число (i 10) выбрано таким образом, ЧТО один оборот стробоцилиндра соответствует перемещению фурмы на 2 м, а большая шестерня делает один оборот при перемещении фурмы на 20 м. На шестерни большого диаметра закреплен ролик, который последовательно нажимая на один или несколько микропереключагелей их коммутирует (количество микропереключателей зависит от количества выбранных реперных точек) .
Микропереключатели могут перемещаться по окружности относительно оси шестерни большего диаметра. Это необходимо для выбора значений рёперньк точек, т.е. выбора момента занесения репера (момент
коммутации роликом микропереключателя) при достижении определенной высоты фурмы над металлом, например 2 м, 4 м при двух реперных точках. 5 Такое выполнение командоаппарата 14 значительно повьтает точность коррекции, исключает дополнительные затраты на проложение кабеля к: промышленному командоаппарату, повьшает точность и надежность устройства, удобство его обслуживания.
Установка командоаппарата 14 в корпусе датчиков 3, 5 и 13 позволяет оперативно (при работающем электроприводе) и предварительно (до установки датчиков) выставлять любое значение реперных точек.
Коррекция положения фурмы (запись величины коррекции репера
0/
в счетчик Ь) осуществляется следующим образом. При подъеме или опускании фурма проходит реперную точку, например 4 м, где должна произойти коррекция, командоаппарат 14 выдает сигнал большей длительности путем замыкания микровыключателя .
Этот сигнал с выхода командоаппарата 14 поступает на второй
вход схемы И 12, на первый вход которой поступает импульс (см. фиг. За) от реперного датчика 13. В схеме И 12 происходит стробирование сигнала большей длительности от командоаппарата 14 импульсом от реперного датчика 13, момент появления которого всегда однозначен.
Импульс с выхода схемы И 12 поступает на вход третьего узла 11 оптронной развязки и формирования сигнала, где происходит гальваническая развязка и формирование импульса коррекции (см. фиг. Зг).
Импульс коррекции (фиг. Зг), пройдя второй блок 10 синхронизации, переписывает значение реперной точки (4 м), хранимое в реперном регистре 16, в счетчик 6.
Сигнал от командоаппарата 15 выдается один раз при перемещении фурмы по всей высоте (18 м) при одной реперной точке, а импульс
5 от реперного датчика 13 поступает
один раз при каждом обороте стробоцилиндра 15 (2 м), но их стробирование происходит только в момент прохождения фурмой отметки (4 м), т.е. величины коррекции.
При ремонте или замене фурмы величина реперной точки (коррекции) уточняется и заносится в реперный регистр 16, где может храниться и несколько значений реперной точки.
Таким o6pa3OMj, благодаря особому размещению датчиков и конструкции стробоцилиндра (возможность размещать датчики по всему периметру делительной окружности стробоцилиндра) период следования информационньк импульсов становится равномерным, что в свою очередь делает реальным повьшение разрешающей способности стробоцилиндра (происходит
-МП
12
учетверение информационнбпс импульсов) , что исключает сбои в логическом блоке И-ИЛИ за счет равномерности периода следования информационных импульсов от датчиков, а также упрощает установку датчиков и их настройку.
Введение реперного датчика 13, схемы И 12, узла 11 оптронной развязки и формирования и блока 10 синхронизации дает воз южность осуществить стробирование сигнала командоаппарата 14 с импульсом реперного датчика 13, что существенно повышает точность ввода коррекции и, следовательно, повьшгает точность работы всего устройства.
риг. /
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля кислородно-конвертерного процесса | 1985 |
|
SU1364640A1 |
| Устройство для контроля процесса шлакообразования в конвертере | 1990 |
|
SU1710580A1 |
| Устройство для контроля процесса шлакообразования в конверторе | 1988 |
|
SU1581749A1 |
| Устройство управления механизмом укладки провода в намоточных станках | 1983 |
|
SU1134516A1 |
| Устройство контроля уровня ванны в конвертере во время продувки | 1981 |
|
SU973625A1 |
| Устройство для сбора,кодирования,передачи и приема информации с исправлением ошибок | 1980 |
|
SU960898A1 |
| Устройство для определения высоты фурмы в конвертере | 1985 |
|
SU1245598A1 |
| Устройство для управления автоматическими линиями обработки деталей | 1983 |
|
SU1135820A1 |
| Устройство для автоматической фокусировки излучения на носителе в системе записи-воспроизведения информации | 1989 |
|
SU1705861A1 |
| Передающее устройство телеуправления | 1990 |
|
SU1795498A1 |
УСТРОЙСТВО ЦИФРОВОГО КОНТРОЛЯ ПОЛОЖЕНИЯ КИСЛОРОДНОЙ ФУРМЫ, содержащее два датчика углового перемещения, счетчик, выход которого соединен с входом блока связи с ЭВМ, командоаппарат, блок коррекции, блок учетверения сигналов и блок определения направления, отличающееся тем, что, с целью повышения точности контроля положения кислородной фурмы, в устройство введены стробоцштиндр, три узла оптронной развязки и формирования сигнала, генератор тактовых импульсов, реперный регистр, реперный датчик, два блока синхронизации, схема И и логический блок И-ИЛИ, причем первый вход логического блока И-ИЖ соединен с выходом первого узла оптронной развязки и формирования сигнала, вход которого соединен с выходом первого датчика углового перемещения, второй вход логического блока И-ИЛИ соединен с выходом второго узла оптронной развязки и формирования сигнала, вход которого соединен с выходом второго датчика углового перемещения, реверсивный выход логического блока И-ИЛИ соединен с входом Реверс счетчика, а счетный выход логического блока И-ИЛИ соединен с первым входом первого блока синхронизации, выход которого соединен со счетным входом счетчика, BTopoii вход первого блока синхронизации соединен с первым выходом генератора тактовых импульсов, третий вход первого блока синхронизации соединен общей точкой с .входной шиной Опрос и первым входом второго блока синхронизации, второй вход котороI го соединен с вторым выходом генератора тактовых импульсов, третий (Л вход второТо блока синхронизации соединен с выходом третьего узла оптронной развязки и формирования сигнала, вход которого соединен с выходом схемы И, первый вход которой соединен с выходом реперного датчика, второй вход схемы И динен с выходом Командоаппарата, 00 вход которого механически связан с -ч осью стробоцилиндра, а выход второ 5 го блока синхронизации соединен с входом Запись числа счетчика, вход Ввод числа которого соединен с выходом реперного регистра, командоаппарат размещен в одном корпусе с датчиками, стробоцштиндр выполнен с реперной щелью, угловое расстояние между датчиками углового перемещения равно Ht-t- где N - количество, шагов i метэду зубьями стробоцилиндра, а угловое расстояние реперного датчика равно-Ы. первого или второго датчиЗса углового перемещения, где-i- -|
f i:
t i t
3|
1l
Фиг. 3
2 -
45
ibll
1
I
,. Опрос О-
Unn. от датчина
Пг/
CuH)tp. имп О-
Тег
Г
иг
Bwtcf
ir
Фиг. S
| Устройство управления положением фурмы конвертера | 1980 |
|
SU899658A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Устройство для контроля положения кислородной фурмы | 1978 |
|
SU789587A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
