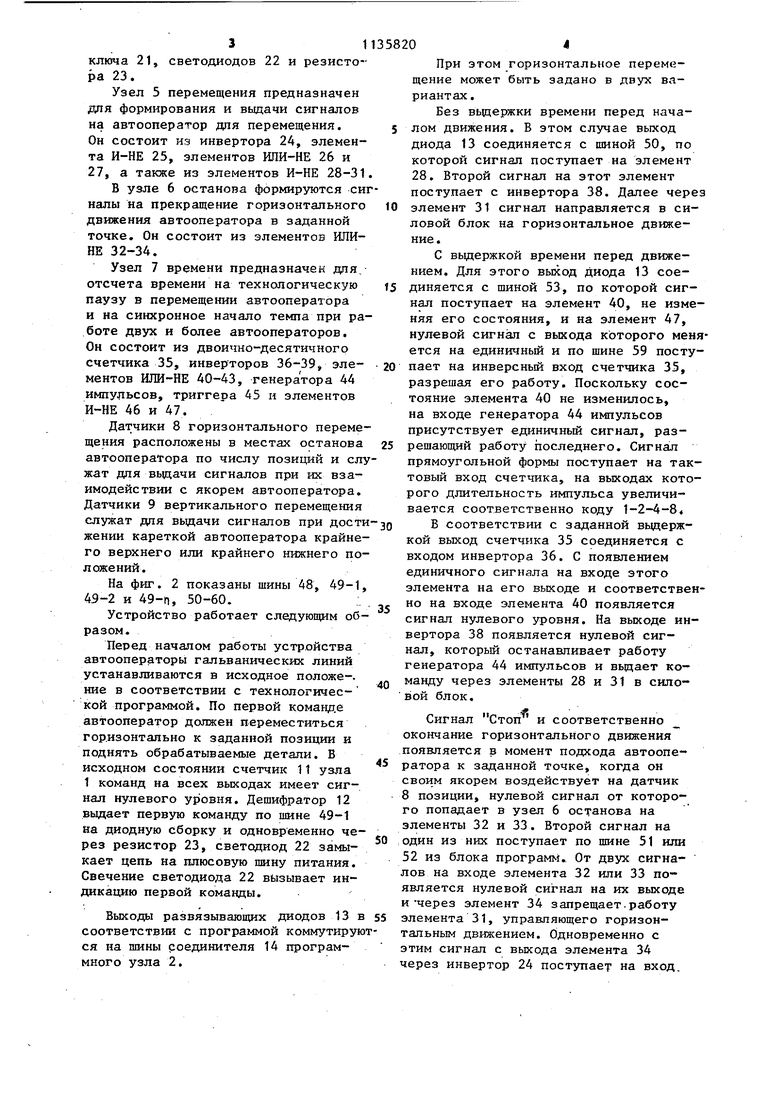
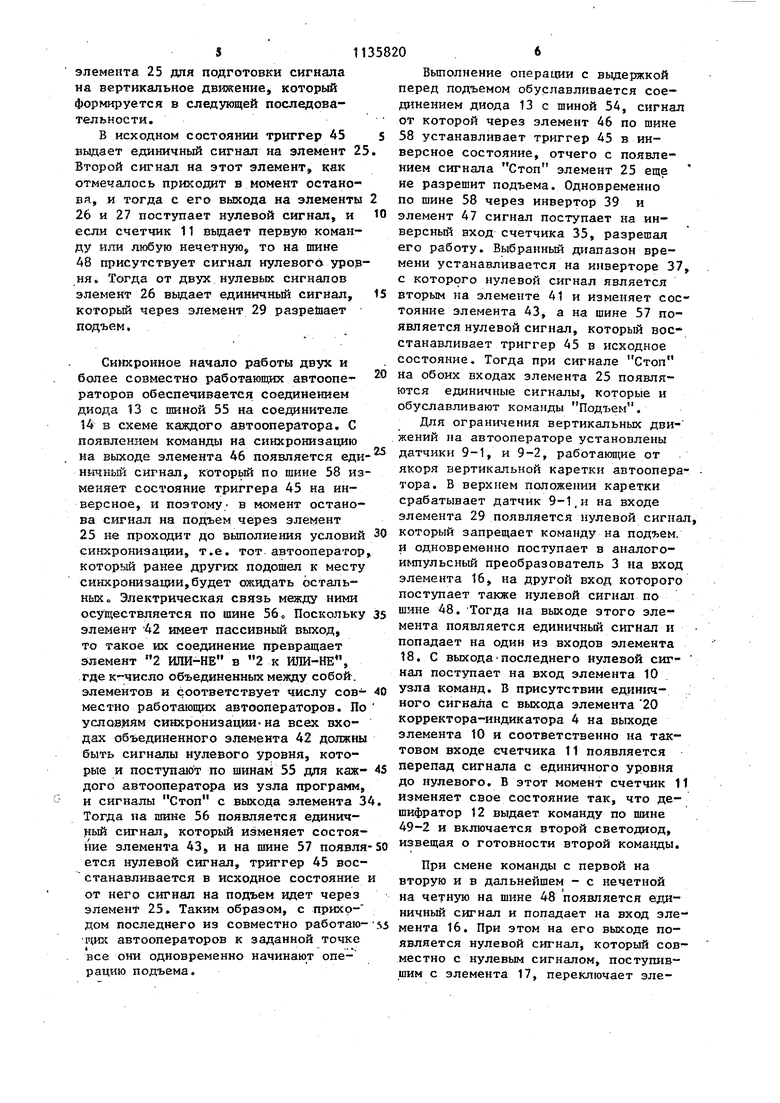
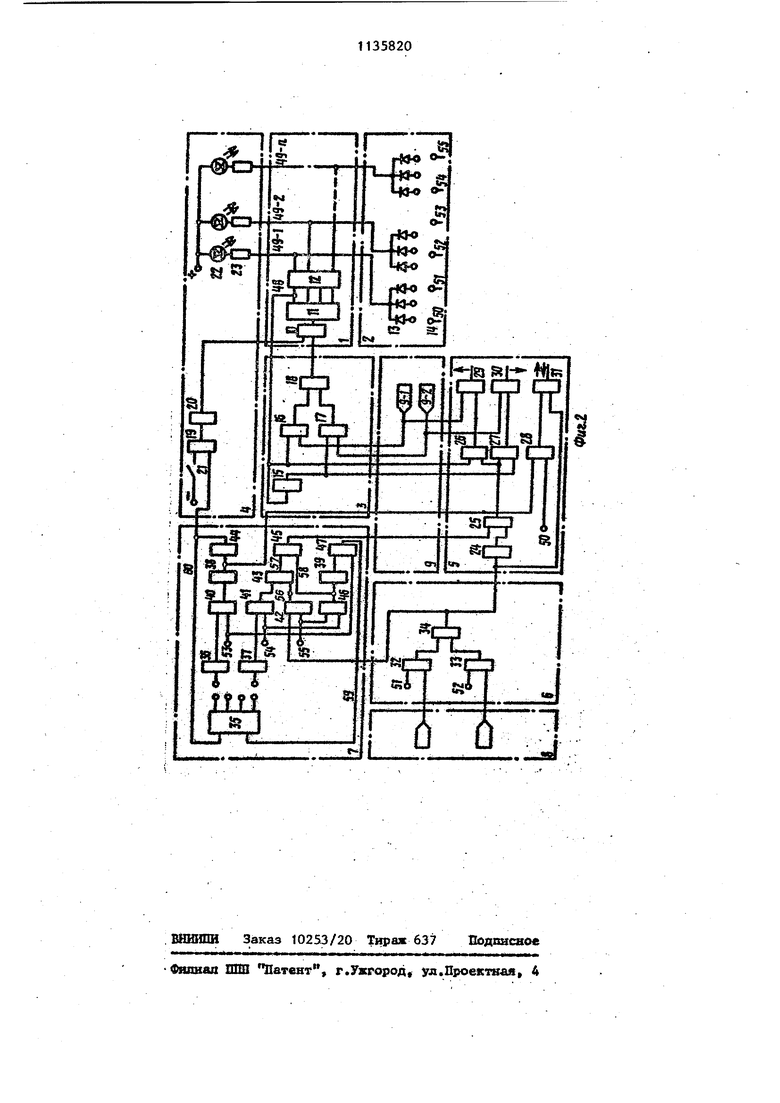
1113 Изобретение относится, к автоматике и может быть использовано, в част ности, для управления транспортными механизмами гальваноавтоматов. Известно устройство дпя управления автоматическими линиями гальванопокрытий, которое содержит блок датчиков перемещения, блок переработки информации, программный блок, блок реверсивного счета позиций, блок счета времени, регистр команд, регистр заданий позиций, регистр счета позиций, блок совпадений, блок управления авто оператором и исполнительный механизм ОЗ Однако данное устройство ненадежно в работе, так как отдельные элементы блок-схемы, например блок переработки информации и реверсивный счетчик, могут вьдавать ложную инфор-2о аци1о. Кроме того, в самой блок-схем наличествуют элементымеханики, что усложняет изготовление и снижает эксплуатационные характеристики устройства. Наиболее близким к изобретению п технической сущности и достигаемому результату является устройство для управления автоматическими линиями обработки деталей, включающее узел команд, узел програ(«, узел перемещения транспортного механизма, уз времени и узел останова. Каждый бло представляет собой определенную совокупность магнитньк логических элементов, соединенных таким образом, что обеспечивается выдача одной определенной команды для выполнения операции в соответствии с заданной программой fz Однако известное устройство также недостаточно надежно в работе.Эт вызвано слтакностью его блок-схемы. Цель изобретения - повышение надежности устройства путем упрощения блок-схемы командоаппарата. Поставленная цель достигается те что устройство дпя управления автоматическими линиями обработки детал включающее узел команд, узел программ, узел перемещения транспортного механизма, узел останова и узе времени снабжено аналого-импульсным преобразователем и корректороминдикатором, а узел времени выполне в виде генератора импульсов, счетчи ка логических элементов и триггера при этом узел команд своим выходом связан с узлом программ и через негоЧ с узлом перемещения, узлом останова и узлом времени, а входом через корректор-индикатор также с узлом времени, вход аналого-импульсного преобразователя соединен с узлом перемещения и обратной связью с узлом команд, причем вход узла перемещения связан с узлом времени. На фиг. 1 представлена блок-схема командоаппарата$ на фиг. 2 - принципиальная схема работы устройства. Устройство содержит узел 1 команд, узел 2 программ, аналого-импульсньй преобразователь 3, корректор-индикатор 4 команд, узел 5 перемещения, узел 6 останова, узел 7 времени, датчики 8 горизонтального перемещения, датчики 9-1 и 9-2 вертикального перемещения. Кажды узел представляет собой определенную совокупность интегральных логических элементов на микросхемах, соединенных таким образом, что обеспечивается последовательная вьздача определенных команд для выполнения операций в соответствии с заданной программой. Узел t команд служит для формирования команд и состоит из элементов И to, двоично-десятичного счетчика , 11 и дешифратора 12. Узел 2 nporpaNJM служит дпя ввода в схему устройства команд на выг полнение операций подъемно-транспортнын механизмом (автооператором), на технологическую задержку перед их выполнением и на синхронную работу в случае совместной работы двух и более автооператоров. Он состоит из диодов 13 развязки 13 и соединителя 14. Аиалого-импульсный преобразователь 3 предназначен для преобразования постоянного сигнала, поступающего от датчиков 9 вертикального перемещения, в импульс для смены команд в счетчике 11 и состоит из инвертора 15, элементов ИЛИ-НЕ 16-18. Корректор-индикатор 4 применяется для ручного управления узлом 1 команд при случайных сбоях в работе автоматической линии, дпя индикации номера команды в автоматическом и наладочном режимах и, кроме того, позволяет при необходимости установить нужную команду после устранения причин случайного сбоя. Он состоит из элемента ИЛИ-НЕ 19, инвертора 20, ключа 21, светодиодов 22 и резистора 23. Узел 5 перемещения предназначен для формирования и выдачи сигналов на автооператор для перемещения. Он состоит из инвертора 24, элемента И-НЕ 25, элементов ИПИ-НЕ 26 и 27, а также из элементов И-НЕ 28-31 В узле 6 останова формируются си налы на прекращение горизонтального движения автооператора в заданной точке. Он состоит из элементов ИЛИНЕ 32-34. Узел 7 времени предназначен для, отсчета времени на технологическую паузу в перемещении автооператора и на синхронное начало темпа при ра боте двух и более автооператоров. Он состоит из двоично-десятичного счетчика 35, инверторов 36-39, элементов ИЛИ-НЕ 40-43, генератора 44 импульсов, триггера 45 и элементов И-НЕ 46 и 47. Датчики 8 горизонтального переме щения расположены в местах останова автооператора по числу позиций и сл жат для вьщачи сигналов при их взаимодействии с якорем автооператора. Датчики 9 вертикального перемещения служат для вьщачи сигналов при дост жении кареткой автооператора крайне го верхнего или крайнего нижнего по ложений. На фиг. 2 показаны шины 48, 49-1 45-2 и 49-п, 50-60. Устройство работает следующим об разом. Перед началом работы устройства автооператоры гальванических линий устанавливаются в исходное положе-. ние в соответствии с технологической программой. По первой команде автооператор должен переместиться горизонтально к заданной позиции и поднять обрабатываемые детали. В исходном состоянии счетчик 11 узла 1 команд на всех выходах имеет сигнал нулевого уровня. Дешифратор 12 выдает первую команду по шине 49-1 На диодную сборку и одновременно че рез резистор 23, светодиод 22 замыкает цепь на плюсовую пшну питания. Свечение светодиода 22 вызывает индикацию первой команды. Выходы развязывающих диодов 13 соответствии с программой коммутиру ся на шины соединителя 14 программного узла 2. При этом горизонтальное перемещение может быть задано в двух вариантах. Без вьдержки времени перед началом движения. В этом случае выход диода 13 соединяется с аиной 50, по которой сигнал поступает на элемент 28. Второй сигнал на этот элемент поступает с инвертора 38. Далее через элемент 31 сигнал направляется в силовой блок на горизонтальное движение. С вьщержкой времени перед движением. Для этого выход диода 13 соединяется с шиной 53, по которой сигнал поступает на элемент 40, не изменяя его состояния, и на элемент 47, нулевой сигнал с выхода которого меняется на единичный и по шине 59 поступает на инверсный вход счетчика 35, разрешая его работу. Поскольку состояние элемента 40 не изменилось, на входе генератора 44 импульсов присутствует единичный сигнал, разрешающий работу последнего. Сигнал прямоугольной формы nocTjrnaeT на тактовый вход счетчика, на выходах которого длительность импульса увеличивается соответственно коду 1-2-4-8« В соответствии с заданной выдержкой выход счетчика 35 соединяется с входом инвертора 36. С появлением единичного сигнала на входе этого элемента на его выходе и соответственно на входе элемента 40 появляется сигнал нулевого уровня. На выходе инвертора 38 появляется нулевой сигнал, которьй останавливает работу генератора 44 импульсов и вьщает команду через элементы 28 и 31 в силовой блок. Сигнал Стоп и соответственно окончание горизонтального движения появляется в момент подхода автооператора к заданной точке, когда он своим якорем воздействует на датчик 8 позиции, нулевой сигнал от которого попадает в узел 6 останова на элементы 32 и 33. Второй сигнал на один из них поступает по шине 51 или 52 из блока програм 1. От двух сигнаов на входе элемента 32 или 33 появляется нулевой сигнал на их выходе и-через элемент 34 запрещает.работу элемента 31, управляющего горизонтальным движением. Одновременно с этим сигнал с выхода элемента 34 ерез инвертор 24 поступает на вход.
элемента 25 для подготовки сигнала на вертикальное движение, который формируется в следующей последовательности.
В исходном состоянии триггер 45 выдает единичный сигнал на элемент 25 Второй сигнал на этот элемент, как отмечалось приходит в момент останова, и тогда с его выхода на элементы 26 и 27 поступает нулевой сигнал, и если счетчик 11 зъщ&ет первую команду или любую нечетную, то на шине 48 присутствует сигнал нулевого урорня. Тогда от двух нулевых сигналов элемент 26 вьщает единичный сигнал, который через элемент 29 разрешает подъем.
Синхронное начало работы двух и более совместно работающих автооператоров обеспечивается соединением диода 13 с шиной 55 на соединителе 14 в схеме каждого автооператора. С появлением команды на синхронизацию на выходе элемента 46 появляется един кный сигнал, которьй по шине 58 изменяет состояние триггера 45 на инверсное, и поэтому/ в момент останова сигнал на подъем через элемент 25 не проходит до выполнения условий синхронизации, т.е. тот автооператор который ранее других подошел к месту синхронизации,будет ожидать остальных Электрическая связь между ними осуществляется по шине 56 о Поскольку элемент 42 имеет пассивный выход, то такое их соединение превращает элемент 2 ИЛИ-НЕ в 2 к ЩШ-НЕ, где к-число объединенных между собой, элементов и соответствует числу совместно работающих автооператоров. По уелов.иям синхронизации-на всех входах объединенного элемента 42 должны быть сигналы нулевого уровня, которые и поступают по шинам 55 для каждого автооператора из узла программ, и сигналы Стоп с выхода элемента 3 Тогда на шике 56 появляется единичный сигнал, который изменяет состояние элемента 43, и на шине 57 появля ется нулевой сигнал, триггер 45 восстанавливается в исходное состояние от него сигнал на подъем идет через элемент 25. Таким образом, с приходом последнего из совместно работаюр;их автооператоров к заданной точке все они одновременно начинают операцию подъема.
Выполнение операции с вьодержкой перед подъемом обуславливается соединением диода 13 с шиной 54, сигнал от которой через элемент 46 по шине 58 устанавливает триггер 45 в инверсное состояние, отчего с появлением сигнала Стоп элемент 25 еще не разрешит подъема. Одновременно по шине 58 через инвертор 39 и элемент 47 сигнал поступает на инверсный вход счетчика 35, разрешая его работу. Выбранный диапазон времени устанавливается на инверторе 37 с которого нулевой сигнал является вторым на элементе 41 и изменяет состояние элемента 43, а на шине 57 появляется нулевой сигнал, который восстанавливает триггер 45 в исходное состояние. Тогда при сигнале Стоп на обоих входах элемента 25 появляются единичные сигналы, которые и обуславливают команды Подъем.
Для ограничения вертикальных движений па автооператоре установлены датчики 9-1, и 9-2, работаняцие от якоря вертикальной каретки автооператора. В верхнем положении каретки срабатывает датчик 9-1,и на входе элемента 29 появляется нулевой сигна который запрещает команду на подъем, и одновременно поступает в аналогои myльcный преобразователь 3 на вход элемента 16, на другой вход которого поступает также нулевой сигнал по шине 48. Тогда на выходе этого элемента появляется единичный сигнал и попадает на один из входов элемента 18. С выходапоследнего нулевой сиг нал поступает на вход элемента 10 узла команд. В присутствии единичного сигнала с выхода элемента 20 корректора-индикатора 4 на выходе элемента 10 и соответственно на тактовом входе счетчика 11 появляется перепад сигнала с единичного уровня до нулевого. В этот момент счетчик 1 изменяет свое состояние так, что дешифратор 12 выдает команду по шине 49-2 и включается второй светодяод, извещая о готовности второй команды.
При смене команды с первой на вторую и в дальнейшем - с нечетной на четную на шине 48 появляется единичный сигнал и попадает на вход элемента 16. При этом на его выходе появляется нулевой сигнал, который совместно с нулевым сигналом, поступившим с элемента 17, переключает злеЦент 18. Далее, с выхода элемента . 18 через элемент 10 единичный сигнал поступает на тактовый вход счетчика 11, В то же время единичный сигнал по шине 48 поступает на вход инверт ра 15, с которого нулевой сигнал по ступает на вход элемента 17 для смены команды совместно с сигналом от нижнего датчика, а также и на вход элемента 27 для по;5готовки сигнала на опускание. Вторая команда, как и каждаячетная, поступает с выходов диодов 13 на шину 50 для выполнения горизонтального движения н на шину 51 или 52 для выбора позиции останова, подобно нечетной команде. Других соединений по четным командам не выполняется. Поэтому сигнал Стоп через инвертор 24 и элемент 25 йо ступает на входы элементов 26 и 27, Теперь, когда на обоих входах элемента 27 присутствуют нулевые сигналы, команда на опускание через элементы 27 и 30 поступает в силовой блок. Якорь вертикальной каретки воз действует на нижний .датчик 9-2 и на входе элемента 30 появляется сигнал, запрещающий команду на опускание. В то же время на обоих входах элемен та 17 появляются нулевые сигналы, ко торые через элементы 18 и 10 подают сигнал на тактовый вход счетчика 11 для переключения его на третьюкоманду. Переключение команд от 21 корректора-индикатора 4 в целях нроэерки работы узла команд либо для ус тановки нужной команды в пределах те нологического цикла осуществляется следующим образом. Поскольку генератор 44 импульсов постоянно вьщает сигналы, то ключом 21 нулевой сигнал, поданный на вход элемента 19, позволяет этим импульсам пройти по цепи элементов 19, 20 и 10 на тактовьй вход счетчика 11 и тем самым проследить за правильностью чередования команд или при необходимости восстановить любую из них. В этом случае комавды чередуются с частотой импульсных сигналов до от пускания ключа. Таким образом, повышение надежности достигается за счет упрощения блоксхемы командоаппарата путем сокращения числа элементов, входящих в блоки, и их рациональной взаимосвязи. Такая взаимосвязь позволяет применить элементы, обладающие более широкими функциональными возможностями и, как следствие, сократить их число в сравнении с известным. Например, введение в блок-схему такого узла времени, который наряду со своим основным назначением - отсчет времени на технологические операции - дает возможность использовать один из своих каналов для выполнения функции синхронизации работы практически любого числа автооператоров в любой - точке циклограммь. Вместе с тем прин1ШП его построения (генератор импульсов - логические элементы - выходной триггер) не дает основания относить его к разряду сложных. Другим фактором построения рациональной связи элементов введение в устройство аналого-импульсного преобразователя, выполняющего функцию вторичного опроса в момент переключения счетчика команд. Его функциональные возможности позволяют исключить необходниость программировать вертшсальные перемещения грузозахвата кроме единичных случаев, связанных с технологической вьдержкой перед подъемом . Введенный в устройство корректорндикатор также- служит поставленой ели, так как в любой момент времени озволяет установить нужную команду о циклу, что очень важно в случаях епредвиденных остановок в работе авоматической линии.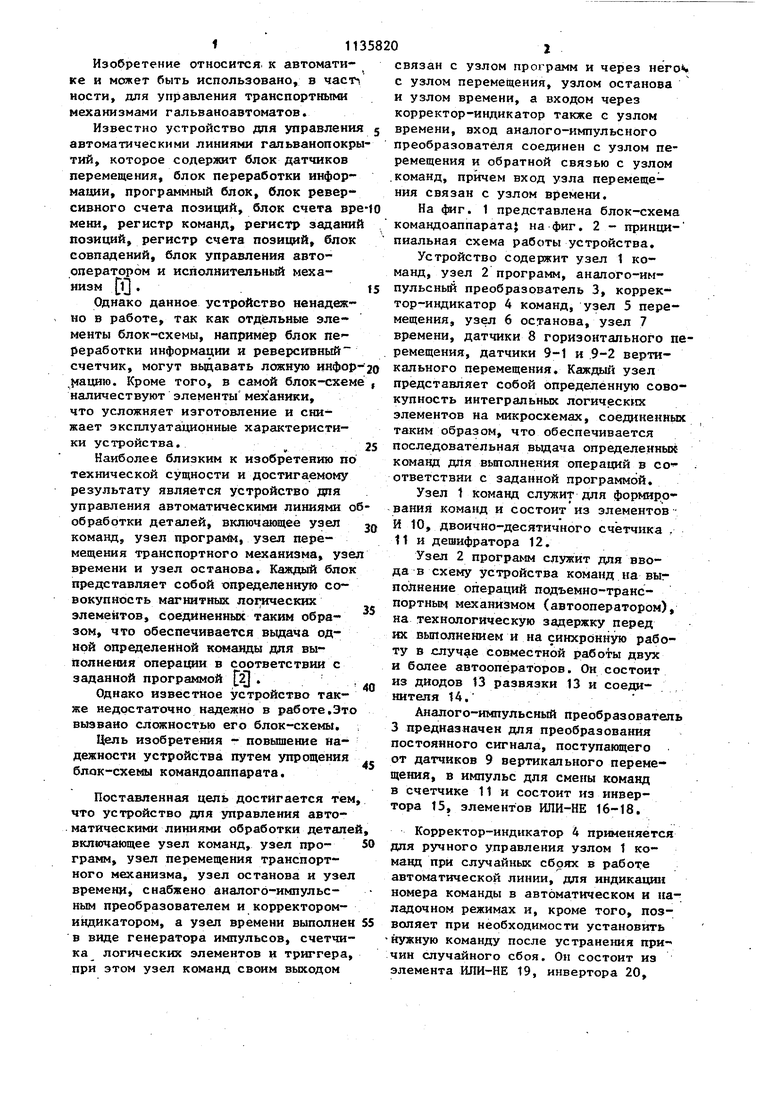
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления автоматическими линиями обработки деталей | 1988 |
|
SU1521792A1 |
| Устройство для управления автоматическими линиями гальванопокрытий | 1983 |
|
SU1095136A1 |
| Устройство для сигнализации состояния исполнительного механизма | 1986 |
|
SU1341667A2 |
| Устройство управления паровоздушным молотом | 1983 |
|
SU1131584A1 |
| Устройство для управления автоматическими линиями | 1990 |
|
SU1805448A1 |
| Устройство для управления автооператором полуавтоматической линии гальванопокрытий | 1984 |
|
SU1236015A1 |
| Устройство для программного управления | 1982 |
|
SU1057925A1 |
| Устройство для программного управления | 1982 |
|
SU1067470A1 |
| Устройство для управления автоматическими линиями | 1983 |
|
SU1149223A1 |
| Многоканальное устройство для программного управления автоматической линией изготовления многослойных керамических конденсаторов | 1985 |
|
SU1297013A1 |
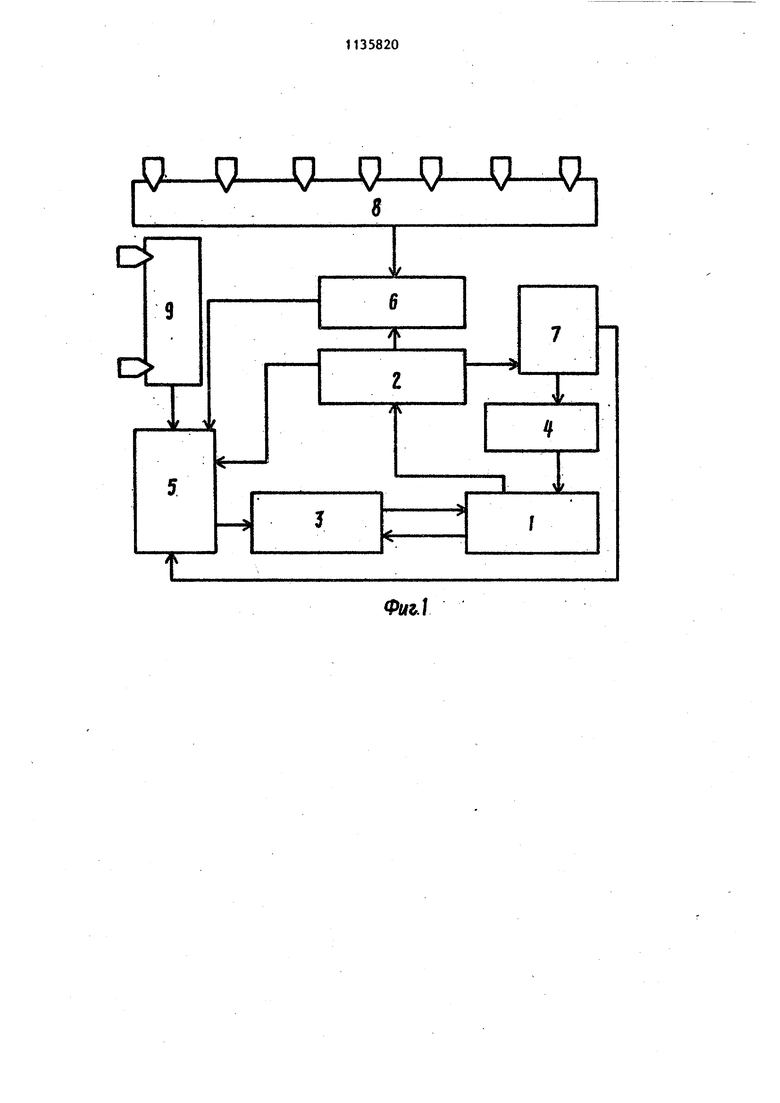
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АВТОМАТИЧЕСКИМИ ЛИНИЯМИ ОБРАВОТКИ ДЕТАЛЕЙ, вкшочакицее узел команд, узел программ узел перемещения транспортного механизма, узел времени и узел останова, отличающее- с я тем, что, с целью повышения надежности путем упрощения блок-схемы командоаппарата, оно снабжено аналого-импульсным преобразователем и корректором-индикатором, а узел времени выполнен в виде генератора импульсов, счетчика логических элементов и триггера, при зтомузел команд своим выходом связан с узлом программ и через него - с узлом перемещения, узлом останова и узлом времени, а входом через корректор-индикатор также с узлом времени, вход аналогоймпульсного преобразователя соединён с узлом перемещения и обратной связью с узлом команд, причем вход узла перемещения связан с узлом времени.
Фиъ.1
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АВТОМАТИЧЕСКИМИ ЛИНИЯМИ ОБРАБОТКИ ДЕТАЛЕЙ | 1965 |
|
SU224888A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
