2, Устройство по п. 1, отличающееся тем, что в него введены третий датчик угловой скорости и третий интегратор, блок сравнения выполнен из первого, второго и третьего элементов сравнения, первые входы первого и второго из которых являются соответственно первым и вторым входами блока сравнения, выходы первого и второго элементов
сравнения соединены с входами третьего элемента сравнения, выход которого является выходом блока сравнения, третий датчик угловой скорости установлен на входном валу электромагнитной муфты, а его выход через третий интегратор соединен с вторыми входами первого и второго элементов сравнения блока сравнения.
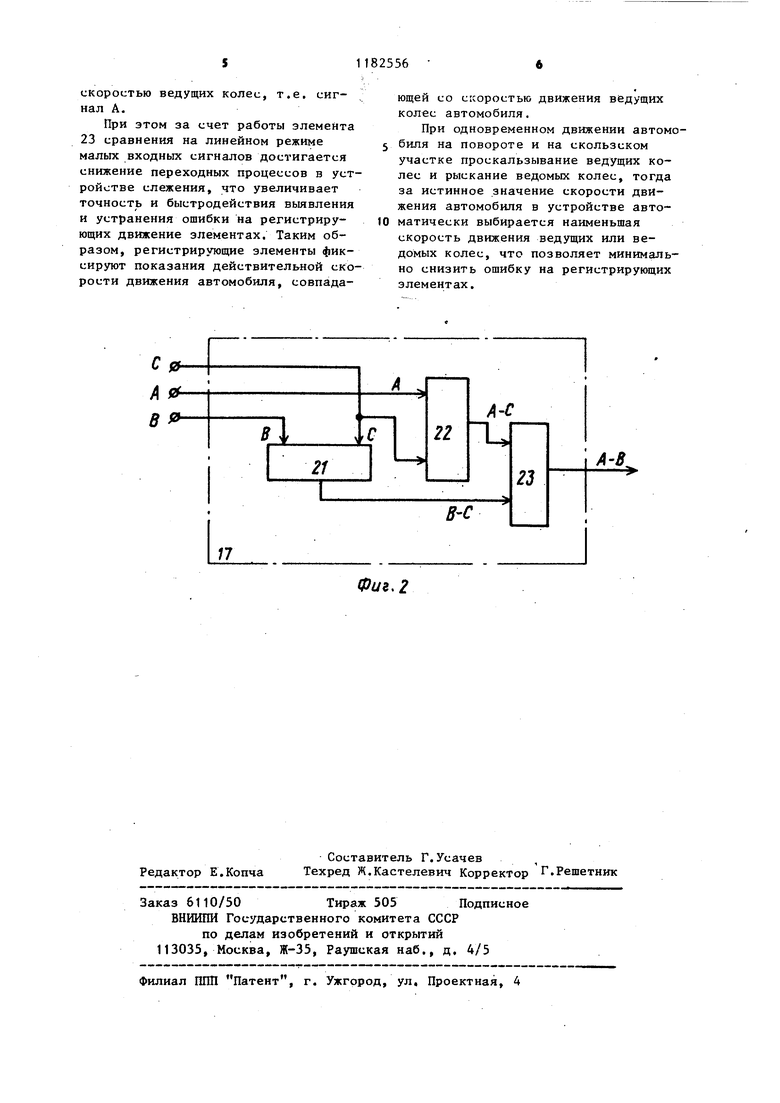
1. УСТРОПСТВО ДЛЯ КОНТРОЛЯ ПРОЙДЕННОГО ПУТИ ТРАНСПОРТНОГО СРЕДСТВА, содержащее датчик вращения, кинематически связанный с ведущими колесами транспортного средства, кинематический распределитель, первый выход которого соединен с входом спидометра, самописец и усилитель, отличающееся тем, что, с целью повышения точности -устройства, в него введены датчики угловой скорости, интеграторы, блок сравнения и электромагнитная муфта, на выходном валу которой установлен первьй датчик угловой скорости, выход которого через первый интегратор подключен к первому входу блока сравнения, выход которого через усилитель соединен с управляющим входом электромагнитной муфты, выходной вал которой соединен с входом кинематического распределителя, второй выход которого связан с входом самописца; второй датчик угловой скорости установлен на ведомых колесах трансш портного средства, а его выход через со второй интегратор соединен с вторым входом блока сравнении, выход датчика вращения соединен с входным валом электромагнитной муфты. 00 К9 СП СП Од
1
Изобретение относится к автоматик а именно к устройствам для контроля и регистрации движения транспортного средства.
Цель изобретения - повышение точности устройства и устранение ручной коррекции ошибок при пробуксовках и рыскании колес транспортного средства.
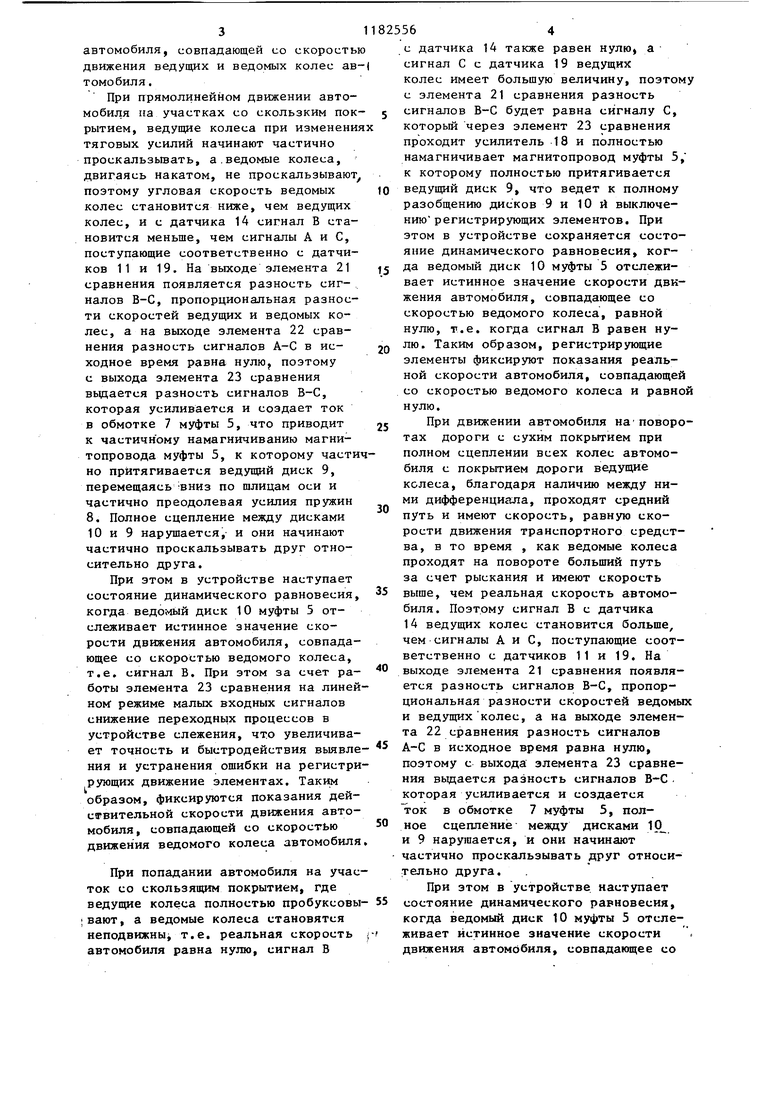
На фиг. 1 изображена блок-схема устройства; на фиг. 2 - функциональная схема блока сравнения.
Устройство состоит из спидометра 1 и самоспица 2, которые подключены тросовыми приводами к кинематическому распределителю 3 и снабжены встроенными редукторами. Между распределителем 3 и датчиком 4 вращения которым служит, например, тросовый привод от вторичного вала коробки передач автомобиля, установлена электромагнитная муфта 5. Иуфта 5 состоит из нижнего ведущего диска 6 с постоянными магнитами, связанного с датчиокм 4 вращания, электрической обмотки 7 на магнитопроводе плоских пружин 8, и верхнего ведущего диска 9, который установлен на шлицевой оси с диском и в исходном положении прижат к ведомому .диску 10 усилием пружины 8. Диск 10 снабжен постоянными магнитами и установлен на валу распределителя 3 Напротив магнитов ведомого диска 10 установлена обмотка первого датчика 11 угловой скорости. Иа ступице 12 ведомого, например, переднего колеса установлены постоянные магниты 13, напротив которых расположена обмотка второго датчика 14 угловой скорости. Датчик 14 подключен к второму интегратору 15, а датчик Г1 подключен к первому интегратору 16. Выходы интеграторов 15 и 16 подключены к блоку 17 сравнения, выход которого через усилитель 18 подключен к обмотке 7 электромагнитной муфты 5. В зоне движения диска 6 установлен третий датчик 19 угловой
0 скорости и третий интегратор 20.
Блок 17 сравнения состоит из элементов сравнения первого, второго и третьего элементов 21-23 сравнения. Выходы элементов 21 и 22
5 сравнения подключены к входу элемента 23 сравнения, выход которого через усилитель 18 подсоединен к обмотке 7 муфты 5.
Устройство работает следующим
0 образом.
При прямолинейном движении авто.мобиля и при полном контакте ведущих .и ведомых колес с поверхностью дороги, угловые скорости всех колес одинаковые, поэтому сигналы А, В, С, формируемые интеграторами 16,15 и 20, также одинаковые, что приводит к их полной компенсации в блоке 17 сравнения, на выходе которого будет нуQ левой уровень.
Поэтому на выходе усилителя 18 сигнал отсутствует, и обмотка 7 муфты 5 обесточена, что сохраняет исходное состояние муфты, когда ведущий диск 9 и ведомый диск 10 находятся в состоянии полного фрикционного сцепления за счет действия пружин 8. Таким образом, спидометр и самописец 2 фиксируют показания действительной скорости движения автомобиля, совпадающей со скорость движения ведущих и ведомых колес ав томобиля. При прямолинейном движении автомобиля па участках со скользким пок рытием, ведущие колеса при изменени тяговых усилий начинают частично проскальзьшать, а.ведомые колеса, двигаясь накатом, не проскальзывают поэтому угловая скорость ведомых колес становится ниже, чем ведущих колес, и с датчика 14 сигнал В становится меньше, чем сигналы А и С, поступающие соответственно с датчиков 11 и 19. На выходе элемента 21 сравнения появляется разность сигналов В-С, пропорциональная разности скоростей ведущих и ведомых колес, а на выходе элемента 22 сравнения разность сигналов А-С в исходное время равна нулю, поэтому с выхода элемента 23 сравнения вьщается разность сигналов В-С, которая усиливается и создает ток в обмотке 7 муфты 5, что приводит к частичному намагничиванию магнитопровода муфты 5, к которому части но притягивается ведущий диск 9, перемещаясь Вниз по шлицам оси и частично преодолевая усилия пружин 8. Полное сцепление между дисками 10 и 9 нарушается, и они начинают частично проскальзывать друг относительно друга. При этом в устройстве наступает состояние динамического равновесия когда ведо; 1ый диск 10 муфты 5 отслеживает истинное значение скорости движения автомобиля, совпада ющее со скоростью ведомого колеса, т.е. сигнал В. При этом за счет работы элемента 23 сравнения на линей ном режиме малых входных сигналов снижение переходных процессов в устройстве слежения, что увеличивает точность и быстродействия выявл кия и устранения ошибки на регистри рующих движение элементах. Таким образом, фиксируются показания действительной скорости движения автомобиля, совпадающей со скоростью движения ведомого колеса автомобил При попадании автомобиля на учас ток со скользящим покрытием, где ведущие колеса полностью пробуксовы вают, а ведомые колеса становятся неподвижны т.е. реальная скорость автомобиля равна нулю, сигнал В с датчика 14 также равен нулю а сигнал С с датчика 19 ведущих колес имеет большую величину, поэтому с элемента 21 сравнения разность сигналов В-С будет равна сигналу С, который через элемент 23 сравнения проходит усилитель 18 и полностью намагничивает магнитопровод муфты 5, к которому полностью притягивается ведущий диск 9, что ведет к полному разобщению дисков 9 и 10 и выключению регистрирующих элементов. При этом в устройстве сохраняется состояние динамического равновесия, когда ведомый диск 10 муфты 5 отслеживает истинное значение скорости движения автомобиля, совпадающее со скоростью ведомого колеса, равной нулю, т.е. когда сигнал В равен нулю. Таким образом, регистрирующие элементы фиксируют показания реальной скорости автомобиля, совпадающей со скоростью ведомого колеса и равной нулю. При движении автомобиля наповоротах дороги с сухим покрытием при полном сцеплении всех колес автомобиля с покрытием дороги ведущие колеса, благодаря наличию между ними дифференциала, проходят средний путь и имеют скорость, равную скорости движения транспортного средства, в то время , как ведомые колеса проходят на повороте больший путь за счет рыскания и имеют скорость выше, чем реальная скорость автомобиля. Поэтому сигнал В с датчика 14 ведущих колес становится больше, чем сигналы А и С, поступающие соответственно с датчиков 11 и 19. На выходе элемента 21 сравнения появляется разность сигналов В-С, пропорциональная разности скоростей ведомых и ведущихколес, а на выходе элемента 22 сравнения разность сигналов А-С в исходное время равна нулю, поэтому с выхода элемента 23 сравнения выдается разность сигналов В-С . которая усиливается и создается ток в обмотке 7 муфты 5, полное сцепление мезеду дисками 10 и 9 нарушается, и они начинают частично проскальзывать друг относительно друга. При этом в устройстве наступает состояние динамического равновесия, когда ведомый диск 10 муфты 5 отслеживает истинное значение скорости движения автомобиля, совпадающее со
скоростью ведущих колес, т.е. сигнал А.
При этом за счет работы элемента 23 сравнения на линейном режиме малых входных сигналов достигается снижение переходных процессов в устройстве слежения, что увеличивает точность и быстродействия выявления и устранения ошибки на регистрирующих движение элементах. Таким обраэом, регистрирующие элементы фиксируют показания действительной скорости движения автомобиля, совпадающей со с1соростью движения ведущих колес автомобиля.
При одновременном движении автомобиля на повороте и на скользском участке проскальзывание ведущих колес и рыскание ведомых колес, тогда за истинное значение скорости движения автомобиля в устройстве автоматически выбирается наименьшая скорость движения ведущих или ведомых колес, что позволяет минимально снизить ошибку на регистрирующих элементах.
А-С
IJ
А-В
23
Фиг. 2
| 1971 |
|
SU412474A1 | |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Устройство для регистрации траектории движения транспортного средства | 1981 |
|
SU960876A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
