(54) СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
СКОЛБЖЕНИЯ ВЕДУЩИХ КОЛЕС ТРАНСПОРТНОГО
СРЕДСТВА В ТЯГОВОМ РЕЖИМЕ
1
Изобретение относится к транспортной технике, а более конкретно к системам, регулирующим скольжение ведущих колес транспортного средства, например автомобиля в тяговом режиме.
Наиболее близкой к предлагаемой по технической сущности является система регулирования скольжения ведущих колес транспортного средства в тяговом режиме, со- держащая каналы измерен 1я угловой скорости ведомого и ведущего колес, каждый из которых содержит последовательно соединенные частотный индукционный датчик, вход которого кинематически связан с колесом, формирователь импульсов сигналов частотного индукционного датчика по амплитуде и форме и интегратор для выдачи электрического аналогового сигнала, пропорционального измеряемой угловой скорости, блок сравнения, каждый вход которого соединен с выходом соответствующего интегратора, коммутатор запрета работы блока сравнения при малых значениях скорости движения транспортного средства, вход которого связан с выходом формирователя импульсов сигналов датчика по амплитуде и форме канала измерения угловой
скорости ведомого колеса, а выход - с выходом интегратора канала изменения угловой скорости ведущего колеса, и исполнительный орган для изменения крутящего момента на коленчатом валу двигателя, вход которого через усилитель мощности связан с выходом блока сравнения 1.
Недостатком известной системы является то, что величина относительного скольжения ведущего колеса, при которой произ р РОДИТСЯ смена сигналов исполнительному органу на уменьщение и увеличение крутящего момента на коленчатом валу двигателя, соответствующем уменьщению и увеличению тягового момента на ведущем колесе в следующих друг за другом циклах
15 регулирования при изменении скорости автомобиля, не сохраняется постоянной, что не обеспечивает постоянство расположения диапазона регулирования SH - SB относительного скольжения ведущего колеса на
2Q оси S и, в конечном итоге, максимально возможных интенсивности разгона и прохоДИМОСТР транспортного средства.
Цель изобретения - повыщение эффективности системы путем осуществления регулирования относительного скольжения ведущих колес транспортного средства.
Указанная цель достигается тем, что система регулирования скольжения ведущи х колес транспортного средства в тяговом режиме снабжена двумя формирователями импульсов сигналов датчиков по длительности, каждый из который установлен в соответствующем канале, измерения угловой скорости колеса, а выход и вход каждого из них связаны соответственно с выходом формиррва-: теля импульсов сигналов частотного индукционного датчика по амплитуде и форме и входом соответствующего интегратора, сигнала на выходе формирователя импульсов сигналов по длительности, а блок сравнения выполнен в виде нуль-органа.
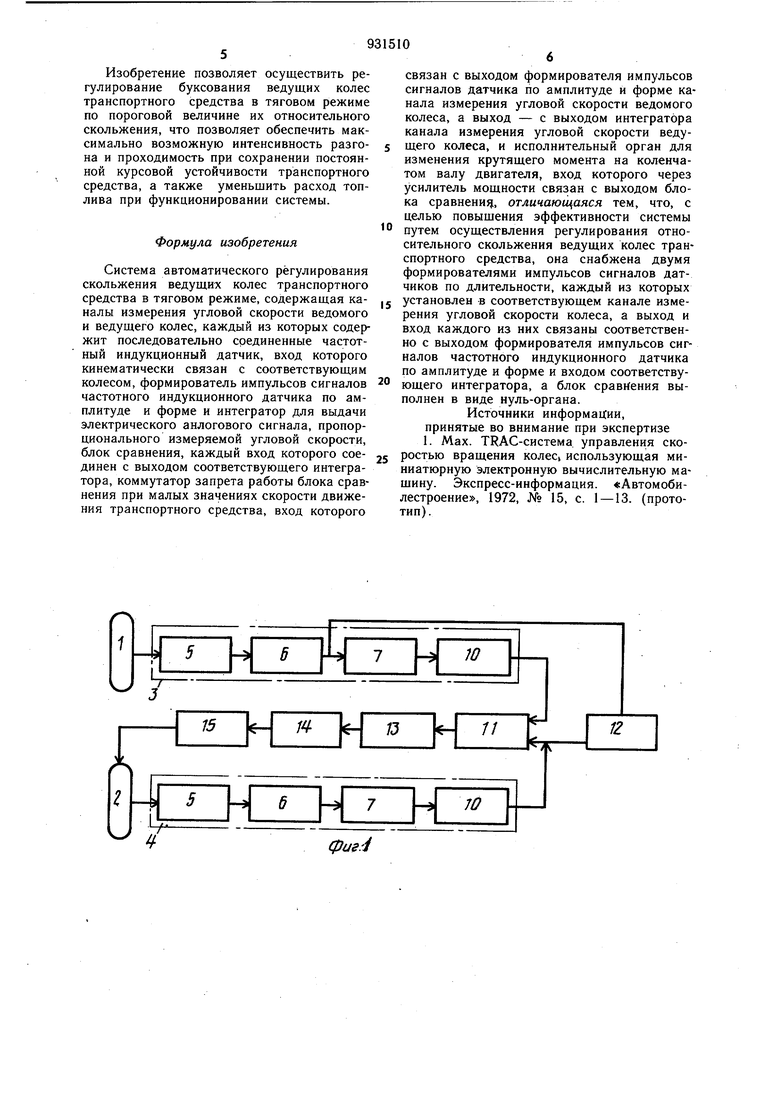
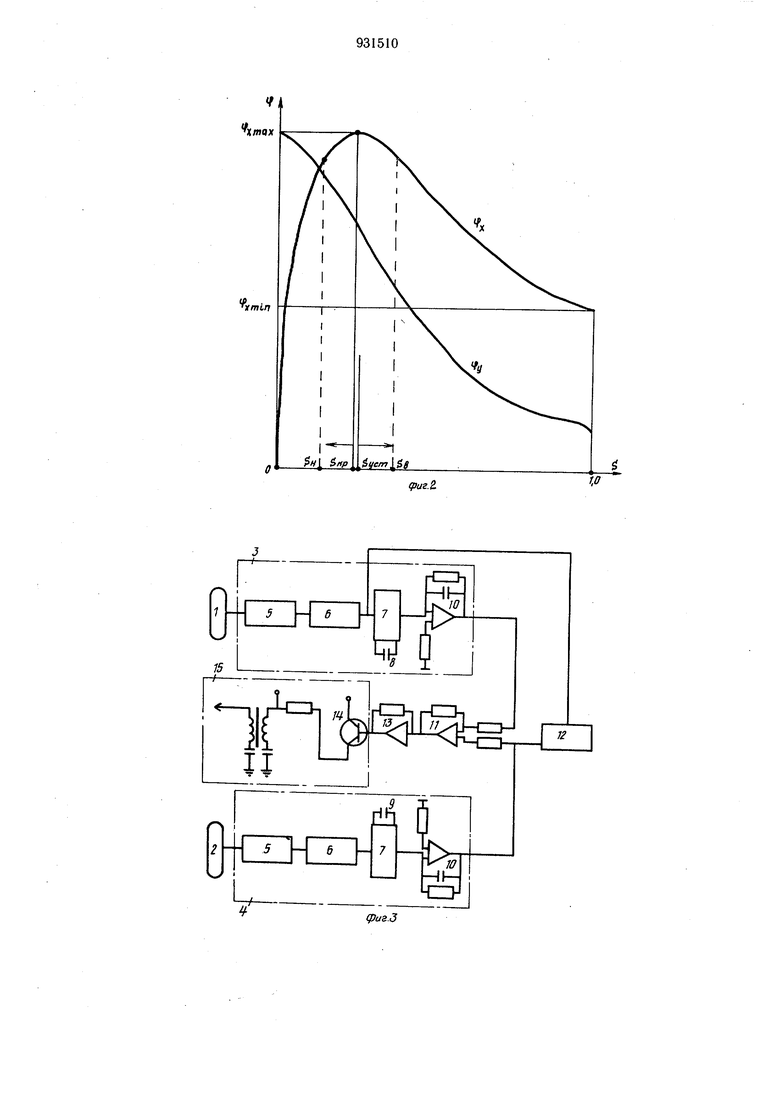
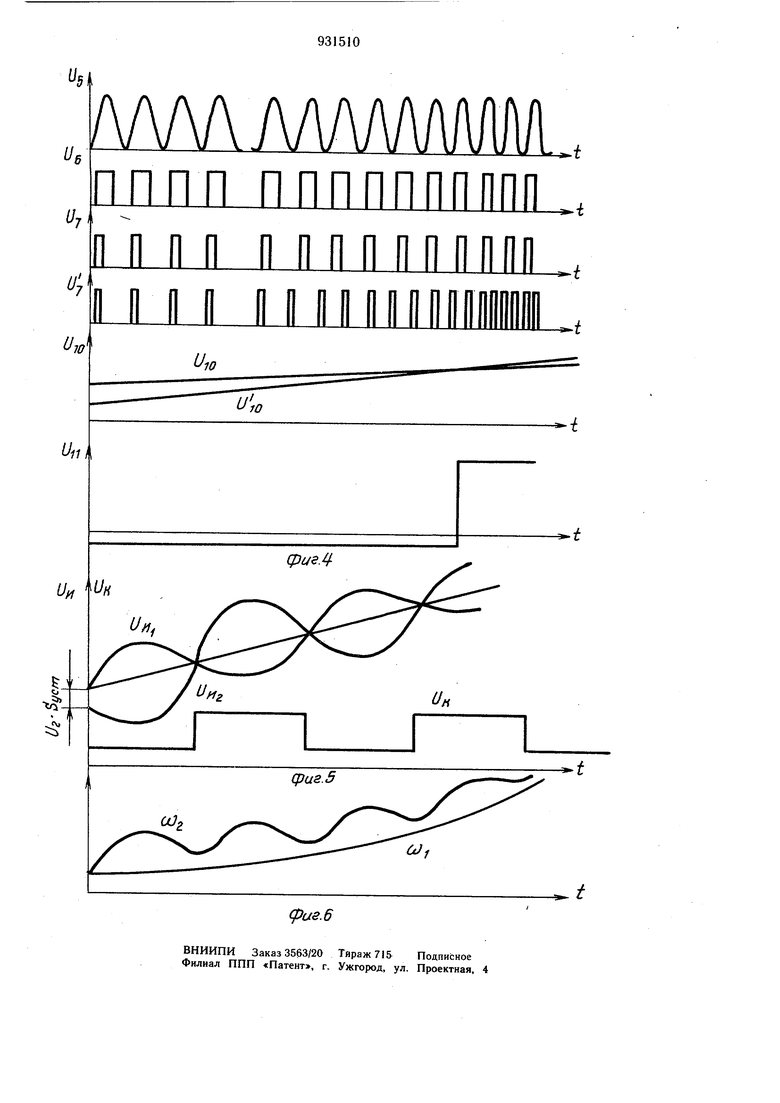
На фиг. 1 показана функциональная схема системы регулирования буК ования колес; на фиг. 2 - график зависимостей коэффициентов сцепления колеса с дорогой в продольном «pв и поперечном «ри направлениях от величины его относительного скольжения S; на фиг. 3 - временная диаграмма работы электронных блоков системы; на фиг. 4- изменение угловых скоростей колес при работе системы; на фиг. 5-6 - графики из.менеиия напряжения на интеграторах и нуль-органе при работе системы.
На фиг. 1 показаны индексами 1 и 2 соответственно ведомое и ведущее колеса транспортного средства.
Предлагаемая система содержит каналы 3 и 4 измерения угловой скорости ведо,мого и ведущего колес, .каждый из которых содержит частотный индукционный датчик 5, формирователь 6 импульсов сигналов датчика по амплитуде и форме, формирователь 7 импульсов сигналов датчика по длительности с конденсаторами 8 и 9 во времязадающих цепях и интегратор 10. Выходы обоих каналов 3 и 4 измерения угловых скоростей колес подключены к блоку 11 сравнения, выполненному по схеме нуль-органа, к нему также подключен электронный коммутатор 12, вход которого подсоединен к выходу формирователя 6 импульсов сигналов датчика по амплитуде и форме канала 3 измерения угловой скорости ведомого колеса. Выход блока 11 сравнения через усилитель 13 мощности соединен с исполнительным органом 14 для изменения крутящего момента на коленчатом валу двигателя 15, функции которого выполняет мощный транзистор, включенный в первичную цепь системы зажигания.
Предлагаемая система работает следующим образом.
При вращении колес 1 и 2 автомобиля в частотных индукционных датчиках 5, магнитно связанных с тормозными барабанами, имеющими фрезерованные зубья по торцовой поверхности, наводится переменная ЭДС - Us f(t) на фиг. 3. Для уменьщения погрещности сравнения и соответственно выдачи команд на регулирование измерительные характеристики Ujo f(t) и ию f(t) интеграторов 10 обоих каналов 3 и 4 измерения должны быть строго идентичны. Для выполнения этого условия сигналы в измерительных каналах 3 и 4 нормализуются по амплитуде и форме Ue f(t) в формирователях 6 и по щирине Uy f{t) и 1-4 f(t) в формирователях 7 длительности.
Количество приносимого заряда на интегратор в каждом импульсе зависит от вольт-секундной площади последнего, которая определяется емкостью конденсаторов 8 и 9 времязадающих цепей формирователей 7 длительности. Таким образом, уменьщив величину емкости конденсатора 9 времязадающей цепи формирователя 7 канала 4 изменения угловой скорости ведущего колеса на величину, пропорциональную пороговому значению его относительно скольжения, получим измерительную характеристику ию f(t) интегратора, лежащую ниже измерительной характеристики Uio f(t) интегратора канала 3 измерение угловой скорости ведомого колеса во всем диапазоне измеряемых частот. Но поскольку угловая скорость ведущего колеса в каждом цикле регулирования растет быстрее, чем угловая скорость ведомого колеса, а блок 11 сравнения выдает сигналы исполнительному органу системы при равенстве напряжений интеграторов 10 (ti), то это соответствует выдаче сигналов по заданному пороговому значению относительного скольжения ведущего колеса (сигнал исполнительному органу 14 в каждом цикле регулирования выдается тогда, когда Ul о U)o, см Ui2 f(t)Ha фиг. 4 и Un f(t), UK f(t) на фиг. 5).
Электронный коммутатор 12 осуществляет блокирование блока 11 сравнения при малых скоростях движения автомобиля.
При достижении и дальнейшем превыщении величиной относительного скольжения ведущего колеса порогового значения (значения уставки) с блока 11 сравнения выдается сигнал, который усиливается в усилителе 13 и подается на вход.исполнительного органа 14, последний уменьщает крутящий момент на коленчатом валу двигателя и соответственно относительное скольжение ведущего колеса.
В момент времени, когда величина относительного скольжения ведущего колеса становится меньще пороговой величины (величины уставки), блок 11 сравнения снимает сигнал с исполнительного органа 14. Крутящий момент на коленчатом валу двигателя 15 увеличивается и увеличивается относительное скольжение ведущего колеса.
В дальнейщем цикл работы системы повторяется.
Изобретение позволяет осуществить регулирование буксования ведущих колес транспортного средства в тяговом режиме по пороговой величине их относительного скольжения, что позволяет обеспечить максимально возможную интенсивность разгона и проходимость при сохранении постоянной курсовой устойчивости транспортного средства, а также уменьшить расход топлива при функционировании системы.
Формула изобретения
Система автоматического регулирования скольжения ведущих колес транспортного средства в тяговом режиме, содержащая каналы измерения угловой скорости ведомого и ведущего колес, каждый из которых содержит последовательно соединенные частотный индукционный датчик, вход которого кинематически связан с соответствующим колесом, формирователь импульсов сигналов частотного индукционного датчика по амплитуде и форме и интегратор для выдачи электрического анлогового сигнала, пропорционального измеряемой угловой скорости, блок сравнения, каждый вход которого соединен с выходом соответствующего интегратора, коммутатор запрета работы блока сравнения при малых значениях скорости движения транспортного средства, вход которого
связан с выходом формирователя импульсов сигналов датчика по амплитуде и форме канала измерения угловой скорости ведомого колеса, а выход - с выходом интегратора канала измерения угловой скорости ведущего колеса, и исполнительный орган для изменения крутящего момента на коленчатом валу двигателя, вход которого через усилитель мощности связан с выходом блока сравнение, отличающаяся тем, что, с целью повышения эффективности системы
° путем осуществления регулирования относительного скольжения ведущих колес транспортного средства, она снабжена двумя формирователями импульсов сигналов датчиков по длительности, каждый из которых
5 установлен в соответствующем канале измерения угловой скорости колеса, а выход и вход каждого из них связаны соответственно с выходом формирователя импульсов сигналов частотного индукционного датчика по амплитуде и форме и входом соответствующего интегратора, а блок сравнения выполнен в виде нуль-органа.
Источники информации, принятые во внимание при экспертизе 1. Мах. TRAC-система управления скоростью вращения колес, использующая миниатюрную электронную вычислительную мащину. Экспресс-информация. «Автомобилестроение, 1972, № 15, с. 1 -13. (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического регулирования скольжения ведущих колес одной оси автомобиля в тяговом режиме | 1983 |
|
SU1232514A1 |
| Система автоматического регулирования скольжения ведущих колес машины в тяговом режиме | 1985 |
|
SU1593995A1 |
| Устройство автоматического регулирования скольжения колес автомобиля в тяговом режиме | 1985 |
|
SU1588579A1 |
| Устройство для автоматического регулирования скольжения ведущих колес транспортного средства | 1985 |
|
SU1586925A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ИЗНОСА ФРИКЦИОНОВ ГИДРОМЕХАНИЧЕСКИХ ПЕРЕДАЧ ТРАНСПОРТНЫХ СРЕДСТВ | 2003 |
|
RU2234071C1 |
| Автомобиль | 1983 |
|
SU1232531A1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ АВТОМОБИЛЯ С ПРЕПЯТСТВИЯМИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2335805C1 |
| Система автоматического регулирования скольжения колес транспортного средства в тормозном режиме | 1982 |
|
SU1239001A1 |
| СИСТЕМА БЕЗУДАРНОГО ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ | 2004 |
|
RU2269709C1 |
| Локомотивная система определения скорости движения и пройденного пути | 2023 |
|
RU2808856C1 |
ЛЛЛЛ ЛАЛАААЛ/1М
1ППП ПППППППППП
П П П П П ППП ononfin
