. 12
ты системы и с выходом соответст- вуняцего формирователя импульсов, дополнительный инвертор, выход которого связан с входами схем совпадения, блок формирования импульсов сброса на О, вход которого связан с выходом дешифратора счетчика импульсов датчика первичной информации об угловой скорости ведомого колеса и выходом упомянутого инвертора, одно- разрядный параллельный регистр, пер- вьй вход которого соединен с выходом дешифратора счетчика импульсов датчика первичной информации об угловой скорости ведущего колеса, BTO-I рой вход - С выходом инвертора, а выход - с входом упомянутого, усилиИзобретение относится к автомобилестроению, а именно к системам, регулирующим скольжение ведущих колес автомобиля в тяговом режиме.
Известна система автоматического регулирования скольжения ведущих колес одной оси автомобиля в тяговом режиме, содержащая датчики первичной информации об УГЛОВЫХ скоростях ве-. дущего и ведомого колес, кинемати- чески связанные соответственно с выходным валом коробки передач и левым ведомым колесом, блок управления содержащий каналы измерения угловых скоростей ведущего и ведомого колес, входы которых подключены к выходам соответствующих датчиков первичной информации об угловых скоростях колес, каждь1Й из которых, в свою очередь, содержит последовательно соединенные формирователь импульсов сигналов упомянутого датчика по амплитуде и форме и интегратор для вьщачи сигнала, пропорционального измеряемой угловой скорости, блок .сравнение, оба входа которого соединены с выходами интеграторов, преобразователь напряжение - ширина импульса, который состоит иэ интегратора и перекидного переключателя, длительность выходного импульса которого пропорциональна выходному напряжению блока сравнения или, что
14
теля, устройство для привода тормозов ведущих колес выполнено электрическим, причем источником и аккумулятором энергии в нем являются соответственно аккумуляторная батарея и генератор системы электрооборудования автомобиля, а исполнительные органы вьшолнены в виде электромагнитов, штоки которых через системы рычагов связаны с тормозными колодками, при этом один из .транзисторных ключей, установлен последовательно электрической цепи обмотки электромагнитного клапана, запорное устройство которого установлено в канале главной дозирунщей системы карбюратора.
однозначно, разности выходных напряжений интеграторов, а пороговые значения разности задаются режимами перекидного переключателя, усилитель мощности, включаемый водителем, и исполнительный орган ,- мощный транзистор, включенный в первичную цепь катушки зажигания, регулирующий крутящий момент на коленчатом валу двигателя, управляемый усиленным и преобразованным в импульсы выходным сигналом блока сравнения, наличие или отсутствие которого зависит от знака разности выходных напряжений интеграторов, а длительность импульсов пропорциональна величине разности С1.
Недостатком данной системы автоматического регулирования скольжения ведущих колес одной оси автомобиля в тяговом режиме является, то, что смена сигналов ее исполнительному органу на уменьшение и увеличение скольжения буксукяцего ведущего колеса в следующих друг за другом циклах регулирования при изменении скорости автомобиля в ней осуществляется при разных величинах его относительного скольжения, что приводит к смещению диапазонов регулирования относительного скольжения ведущих колес в сторону как меньших, так и больших его значений и, в конечном
итоге, к ухудшению интенсивности разгона и проходимости автомобиля. Кроме того, недостатком системы является то, что она содержит один канал сравнения угловых скоростей ведущего и ведомого колес, включающий канал измерения угловой скорости ведущего колеса, связанный с датчиком, установленным у выходного вала коробки передач, и канал измерения угловой скорости ведомого (левого) колеса. В результате при движении автомобиля на поворотах ввиду качения его левых и правых колес по различным радиусам по отношению к центру поворота допускается погрешность в определении порогового значения относительного скольжения буксующего ведущего колеса, что также приводит к смещению диапазона регулирования его относительного скольжения и, в конечном итоге, к ухудшению интенсивности разгона и проходимости автомобиля .
Так как система содержит один канал сравнения угловых скоростей ведущего и ведомого колес и один исполнительный орган - мощный транзистор, включенный в первичную цепь катушки зажигания и регулирующий крутящий момент на коленчатом валу двигателя, то с ее помощью невозможно осуществить индивидуальное регулирование скольжения каждого ведущего колеса одной оси автомобиля, а значит и обеспечить максимально возможную интенсивность разгона и проходимость при движении по дорогам с различными сцепными свойствами по поперечному профилю (под ведущими колесами разных бортов автомобиля).
Известна система автоматического регулирования скольжения ведущих колес одной оси автомобиля в тяговом режиме, содержащая датчики первичной информации об угловых скоростях каждого ведущего и ведомого колес, формирователи импульсов, вход каждого из которых связан с выходом датчика первичной информации об угловой ско- рости одного из ведущих и ведомых колес, блок запрета работы системы при малых значениях скорости движения автомобиля, вход которого связан с выкодом датчика первичной информации об угловой скорости одного из ведомых колес, блок управления,включающий в себя каналы сравнения угло
5
0
5
5 0
0
5
0
5
вых скоростей ведущих колес с- угловыми скоростями ведомых колес каждого борта автомобиля, входы каждого из которых подсоединены к формирователям импульсов датчиков первичной информации об угловых скоростях ведущего и ведомого колес одного Ьорта автомобиля, и злектронный логический блок, которью включает в себя элементы И и инверторы, причем каждый из входов первого из элементов И, вход каждого из инверторов и одни из входов второго и третьего элементов И через усилители подключены к выходам каналов сравнения угловых скоростей ведущего и ведомого колес соответствующего борта автомобиля, а выходы инверторов соединены с другими входами второго и третьего элементов И противоположных бортов автомобиля, устройство для привода тормозов ведущих колес, включающее в себя источник и аккумулятор энергии рабочего тела, и устройство для подключения питания к блоку управления и к трем исполнительным органам, при этом вход первого исполнительного органа связан с выходом первого элемента И через транзисторный ключ, а входы двух других исполнительных органов связаны через транзисторные ключи с выходом второго и третьего элементов И и через выключатель с источником энергии С23 .
Недостатком известной системы автоматического регулирования скольжения ведущих колес одной оси автомобиля в тяговом режиме является то, что она ввиду использования блока управления на дискретных элементах электроники имеет большие габариты, низкую надежность и недостаточно хорошие метрологические характеристики что, в конечном итоге, сказывается на ее эффективности. Кроме того, из- вестная система имеет боя1Л1ие вес и габариты ввиду использования в ней металлоемкого гидравлического привода тормозов ведущих колес с посторонним источником энергии, вклпочаю- шлм резервуар для тормозной жидкост насос высокого давления, обратный клапан, автомат разгрузки насоса, фильтр для очистки жидкости, гидро- аккумулятор, управляющий тормозной клапан, гаситель гидроудара. Таким образом, практически известную систему невозможно устанавливать на
автомобили, которые имеют обычный гидравлический привод тормозов, т.е привод, Б котором усилие для приведения в действие тормозных механиз- мов колес создается водителем через главный тормозной цилиндр.
В известной системе при воздействии исполнительного органа - мощного транзистора на систему зажигания двигателя ввиду ухудшения искрообра- зования происходит потеря части топлива за счет его неполного сгорания, что ведет к повьшению расхода топлива автомобилем.
Цель изобретения - повьшение надежности системы.
Поставленная цель достигается тем, что в системе автоматического регулирования скольжения ведущих ко- лес одной оси автомобиля в тяговом режиме, содержащей датчики первичной информации об угловых скоростях каждого ведущего и ведомого колес, формирователи импульсов, вход каждого из которых связан с выходом датчика первичной информации об угловой скорости одного из ведущих и ведомых колес, блок запрета работы системы при малых значениях скорости движения автомобиля, вход которого связан с выходом датчика первичной информации об угловой скорости одного из ведо1« 1Х колес, блок управления, включакпщй в себя каналы срав- нения угловых скоростей ведущих колес с угловыми скоростями ведомых колес каждого борта автомобиля,входы каждого из которых подсоединены к упомянутым формирователям импульсов датчиков первичной информации об угловых скоростях ведущего и ведомого колес одного борта автомобиля, и электронный логический блок, который включает в себя элементы И и инвер- торы, причем каждый из входов первого из элементов И, вход каждого из инверторов и.одни из входов второго и tpeTbero элементов И через усилители подключены к выходам каналов сравнения угловых скоростей ведущего и ведомого колес соответствующего борта автомобиля, А .выходы инверторов соединены с другими входами второго и третьего элементов И противо- положных бортов автомобиля, устройство для привода тормозов ведущих колес, включающее в себя источ
5
5
10 5
20 5 0 5 0 5
0
ник и аккумулятор энергии рабочего тела, и устройство для подключения питания к блоку управления и к трем исполнительным органам, при этом вход первого исполнительного органа связан с выходом первого элемента И через транзисторный ключ, а входы двух других исполнительных органов связаны через транзисторные ключи с выходом второго и третьего элементов И и через выключатель с источником энергии, каждый из каналов сравнения угловых скоростей ведущих колес с угловыми скоростями ведомых колес блока управления системы включает в себя счетчик импульсов, датчика первичной информации об угловой скорости ведомого колеса с дешифратором, подключенным к выхо ду упомянутого счетчика, счетчик импульсов датчика первичной информации об угловой скорости ведущего колеса с дешифратором, подключенным к выходу упомянутого счетчика, схемы совпадения, входы которых связаны между собой, с выходом блока запрета работы системы и с выходом соответствующего формирователя импульсов, дополнительный инвертор, вьпсод которого связан с входами схем совпадения, блок формирования импульсов сброса на О, вход которого связан с выходом дешифратора счетчика импульсов датчика первичной информации об угловой скорости ведомого колеса и выходом упомянутого инвертора, одноразрядный параллельный регистр, первый вход которого соединен с выходом дешифратора счет 4ика импульсов датчика первичной информации об угловой скорости ведущего колеса, второй вход - с выходом инвертора, а выход - с входом упомянутого усилителя, устройство для привода тор-, мозов ведущих колес выполнено электрическим, причем источником и аккумулятором энергии в нем являются соответственно аккумуляторная батарея и генератор системы электрооборудования автомобиля, а исполнительные органы выполнены в виде электромагнитов, штоки которых через системы рычагов связаны с тормозными колодками, при этом один из транзисторов ключей установлен последовательно электрической цепи обмотки Электромагнитного клапана, запорное
1
устройство которого установлено в канале главной дозирующей системы карбюратора.
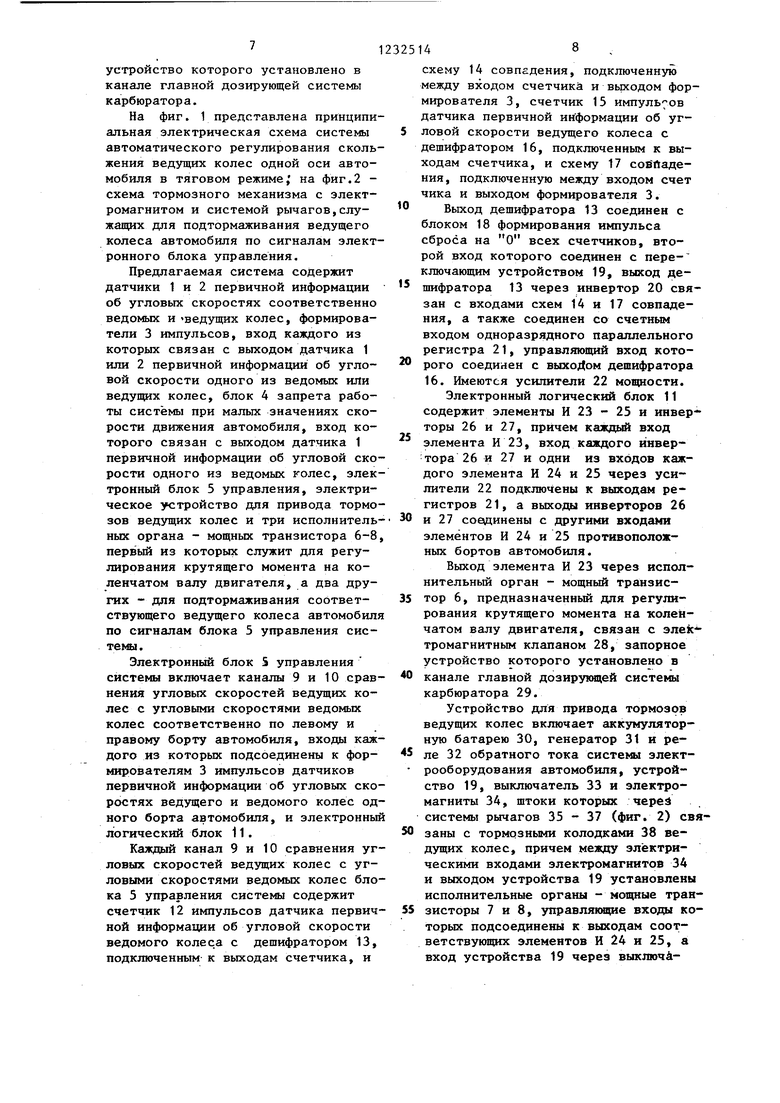
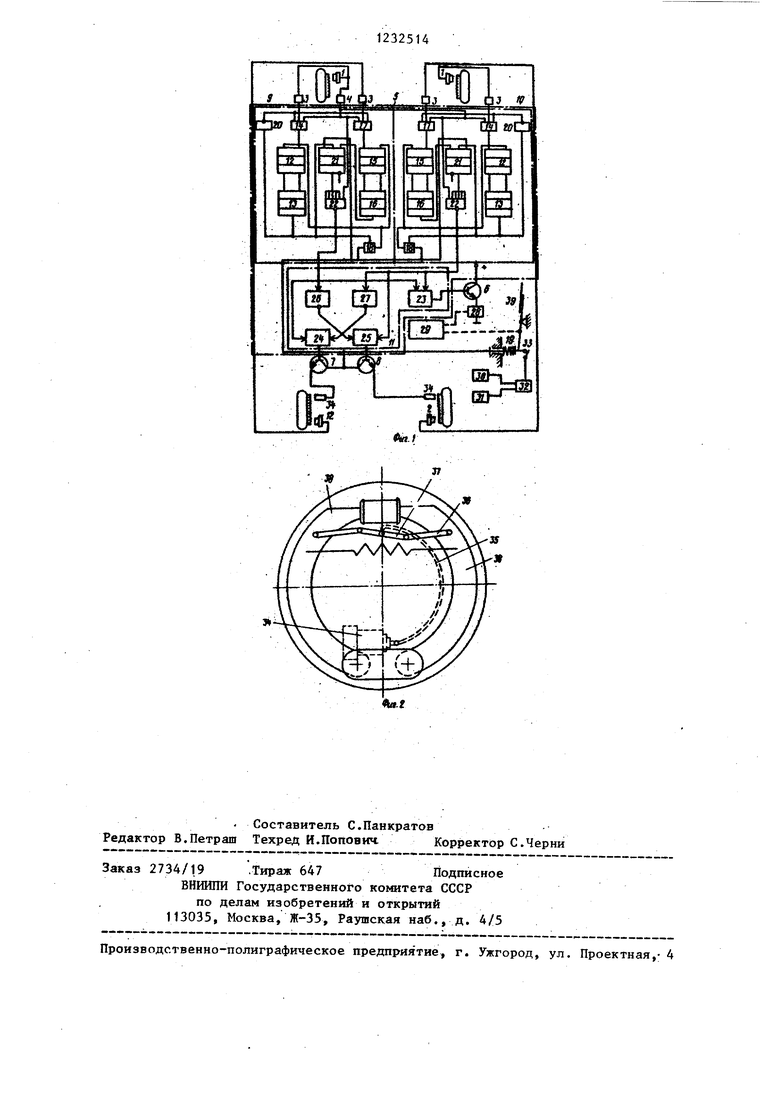
На фиг. 1 представлена принципиальная электрическая схема системы автоматического регулирования скольжения ведущих колес одной оси автомобиля в тяговом режиме; на фиг.2 - схема тормозного механизма с электромагнитом и системой рычагов,служащих для подтормаживания ведущего колеса автомобиля по сигналам электронного блока управления.
Предлагаемая система содержит датчики 1 и 2 первичной информации об угловых скоростях соответственно ведомых и Ведущих колес, формирователи 3 импульсов, вход каждого из которых связан с выходом датчика 1 или 2 первичной информации об угло- вой скорости одного из ведомых или ведущих колес, блок 4 запрета работы системы при малых значениях скорости движения автомобиля, вход которого связан с выходом датчика 1 первичной информации об угловой скорости одного из ведомых колес, электронный блок 5 управления, электрическое устройство для привода тормозов ведущих колес и три исполнительных органа - мощных транзистора 6-8, первый из которых служит для регулирования крутящего момента на коленчатом валу двигателя, а два других - для подтормаживания соответ- ствующего ведущего колеса автомобиля по сигналам блока 5 управления сис- теюй.
Электронный блок S управления системы включает каналы 9 и 10 срав- нения угловых скоростей ведущих колес с угловыми скоростями ведомых колес соответственно по левому и правому борту автомобиля, входы каждого из которых подсоединены к фор- мирователям 3 импульсов датчиков первичной информации об угловых скоростях ведущего и ведомого колес одного борта автомобиля, и электронный логический блок 11.
Каждый канал 9 и 10 сравнения угловых скоростей ведущих колес с угловыми скоростями ведомых колес блока 5 управления системы содержит счетчик 12 импульсов датчика первич- ной информации об угловой скорости ведомого колес.а с дешифратором 13, подключенным к выходам счетчика, и
8
5
5
5 0
5
схему 14 совпадения, подключенную между входом счетчика и вьрсодом формирователя 3, счетчик 15 импульсов датчика первичной информации об угловой скорости ведущего колеса с дешифратором 16, подключенным к выходам счетчика, и схему 17 сов йаде- ния, подключенную между входом счет чика и выходом формирователя 3.
Выход дешифратора 13 соединен с блоком 18 формирования импульса сброса на О всех счетчиков, второй вход которого соединен с пере- ключающим устройством 19, выход дешифратора 13 через инвертор 20 связан с входами схем 14 и 17 совпадения, а также соединен со счетным входом одноразрядного параллельного регистра 21, управляющий вход которого соединен с выходом дешифратора 16. Имеются усилители 22 мощности.
Электронный логический блок 11 содержит элементы И 23 - 25 и инверторы 26 и 27, причем каждый вход элемента И 23, вход каждого инвертора 26 и 27 и одни из входов каждого элемента И 24 и 25 через усилители 22 подключены к выходам регистров 21, а выходы инверторов 26 и 27 соединены с другими входами элементов И 24 и 25 противоположных бортов автомобиля.
Выход элемента И 23 через исполнительный орган - мощный транзистор 6, предназначенный для регулирования крутящего момента на коленчатом валу двигателя, связан с электромагнитным клапаном 28, запорное устройство которого установлено в канале главной дозирующей системы карбюратора 29.
Устройство для привода тормозов ведущих колес включает аккумуляторную батарею 30, генератор 31 и реле 32 обратного тока системы электрооборудования автомобиля, устройство 19, выключатель 33 и электромагниты 34, штоки которых через системы рычагов 35 - 37 (фиг. 2) связаны с тормозными колодками 38 ведущих колес, причем между электрическими входами электромагнитов 34 и выходом устройства 19 установлены исполнительные органы - мощные транзисторы 7 и 8, управлякнцие входы которых подсоединены к выходам соответствующих элементов И 24 и 25, а вход устройства 19 через выключи9. 1232514
33 и реле 32 обратного тока выхо по си ил
к аккумуляторной батарее 30 или генератору 31.
Переключающее устройство 19 сбло крфовано с педалью 39 управления дроссельной заслонкой карбюратора 29
Система работает след тощим образом.
При воздействии оператора (водителя) на педаль 39 управления дроссельной заслонкой карбюратора 29 при замкнутом состоянии выключателя 33 скользящим контактом устройства 19 включается питание на блок 5 управления системы (схемы) и вырабатывается импульс асинхронной установки всех его элементов с памятью (счетчиков 12 и 15 и регистров 21) в О сигналами, сформированными блоками 18 и поданными на их входы R, и, соответственно, на выходах усилителей мощности 22 устанавливаются, нулевые уровни напряжений. Сигналы с дешифраторов 13 и 16 равны О, и, соответственно, выходы инверторов 20 имеют состояния 1.
При вращении ведущих и ведомых колес в индукционных датчиках 1 и 2 с частотой, пропорциональной угловой скорости колес, наводятся электрические сигналы, которые нормализуются по форме в формирователях 3. Схемы 14 и 17 совпадения не разрешают прохождение этих сигналов на входы счетчиков 12 и 15 при отсутствии разрешающего сигнала с блока 4 запрета работы системы при малых значениях скорости движения автомобиля.
Как только угловая скорость ведомого колеса достигает определенного минимального значения, блок 4 запрета работы системы при малых скоростях вырабатьшает разрешающие сигналы схемы 14 и 17 совпадения, которые открываются, пропуская сигналы датчиков на входы соответствующих счетчиков 12 и 15. Емкости счетчиков 12 и 15 выбраны таким образом, что отношение количества импульсов полностью заполненных счетчиков численно равно (1 - ), т.е.
1 - S.
ЧеЭ
- емкость счетчика 12;
где в,
ЕМКОСТЬ счетчика 15.
10
0
5
0
5
0
$
0
5
Структура дешифраторов 13 и 15 выбрана так, что сигнал 1 на выходе дешифратора 13 формируется при полном заполнении счетчика 12, а сигнал 1 на выходе дешифратора 16 формируется при полном заполнении или переполнении счетчика 15.
Таким образом, одновременное открытие входов счетчиков 12 и 15 и одновременное их закрытие при заполнении счетчика 12, сигнал 1 на выходе дешифратора 16 может быть только тогда, когда имеет место скольжение ведущего колеса, т. е. когда величина его угловой скорости больше величины угловой скорости ведомого колеса в (1 - S ) раз, этот сигнал 1 записывается в регистр 21, так как на управляющем и счетном входах регистра имеет место 1, и этот сигнал через инвертируюш;ий усилитель 22 мощности и при наличии на его втором входе разрешающей 1 от блока 4 запрета работы системы при малых скоростях движения автомобиля поступает на один из входов электронного логического блока 11.
При появлении сигнала на выходе канала сравнения угловых скоростей ведущего и ведомого колес другого борта автомобиля, он подается на другой вход электронного логического блока 11.
В исходном состоянии при отсутствии сигналов на выходах каналов 9 и 10 сравнения угловых скоростей ведущих колес с угловыми скоростями ведомых колес обоих бортов автомоби- ля, т.е. при их нулевом уровне, на выходах элементов И 24 и 25 сигналы также имеют нулевой уровень, так как они закрыты по первому входу, а на вторых входах имеется единичный уровень сигналов, поступающих с инверторов 26 и 27 противоположных бортов. Исполнительные органы - мощные транзисторы 7 и 8 закрыты и электромагниты 34 обесточены.
Поскольку на обоих входах элемента И 23 имеются нулевые уровни сигналов с усилителей 22, исполнительный орган - мощный транзистор 6 также закрыт, а электромагнитный клапан 28 обесточен, что сопровождается нормальной работой дозирующей системы карбюратора 29.
Так как автомобиль движется по дороге с непрерывно изменяющимися
11
сцепными свойствами по продольному и поперечному профилям, то и темпы изменения величин относительных скольжений левого и правого ведущих колес изменяются также непрерывно, и, в конечном итоге, значения уставки достигает какое-то одно из ведущих колес: либо левое, либо правое.
Предположим, значения уставки достигла величина относительного скольжения ведущего колеса левого борта автомобиля и канал 9 сравнения угловых скоростей-этого борта выдал единичный уровень сигнала. Этот сигнал проходит через элемент И 24,что приводит к открыФию транзистора 7 и подаче злектрического тока в обмотку электромагнита 34, шток которого через систему рычагов 35 - 37 перемещает тормозные колодки 38. Последнее вызывает подтормаживание левого ведущего колеса. Этот же сигнал через инвертор 26 запирает элемент И 25 включения электромагнита 34 правого борта автомобиля. Воздействовать на электромагнитный клапан 28, предназначенный для закрытия канала главной дозирующей системы карбюратора 29, он не может, посколь ку элемент И 23 заперт.
При появлении сигнала с канала 10 сравнения угловых скоростей ведущего и ведомого колес правого борта автомобиля при продолжающемся действии сигнала с канала 9 сравнения угловых скоростей ведущего и ведомого колес его левого борта этот сигнал воздействовать на,электромагнит 34 правого борта не может, поскольку элемент И 25 этого борта заперт инвертором 26 левого борта автомобиля и закрывает элемент И 24 инвертором 27. Транзистор 7 закрывается, и электромагнит 34 левого борта обесточивается, что приводит к растор- маживанию левого ведущего колеса.
10
IS
20
23251412
Одновременно действующие сигнал с каналов 9 и 10 сравнения угловых скоростей ведущих колес с угловп и скоростями ведомых колес соответст- 5 венно левого и правого бортов автомобиля проходят через элемент И 23 и открывают мощный транзистор о, обеспечивая подачу электрического тока на обмотку электромагнитного клапана 28, которьй закрывает канал главной дозирующей системы карбюратора 29. Крутящий момент на коленчатом валу двигателя уменьшается и, соответственно, уменьшается относительное скольжение обоих ведущих колес.
При снятии одного из сигналов любым из каналов 9 или 10 элемент И 23 закрьшается, транзистор 6 запирается, обесточивая электромагнитный клапан 28. Главная дозирующая система карбюратора 29 восстанавливает подачу топлива в цилиндры двигателя в соответствии с положением его дроссельной заслонки. Через соответствующий инвертор 26 или 27 открывается элемент И 24 или 25 противоположного борта. Действующий иа другом входе электронного логического блока 11 сигнал проходит через элемеит И этого же борта и открывает соответствующий мощный транзистор 7 или 8, что приводит к подтормаживанию одного из ведущих колес.
Так как крутящий момент на коленчатом валу двигателя вновь возрастает, то большая его величина перераспределяется на незатормаживаемое ведущее колесо, что вновь вызьтает увеличение его относительного скольжения .
Таким образом, предлагаемая снег
25
30
35
40
тема обеспечивает индивидуальное независимое регулирование относитель- 45 ного скольжения каждого ведущего колеса автомобиля при его движении в тяговом режиме.
Фм.(
Л
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического регулирования скольжения колес автомобиля в тяговом режиме | 1985 |
|
SU1588579A1 |
| Автомобиль | 1983 |
|
SU1232531A1 |
| Система автоматического регулирования скольжения ведущих колес транспортного средства в тяговом режиме | 1980 |
|
SU931510A1 |
| Система автоматического регулирования скольжения ведущих колес машины в тяговом режиме | 1985 |
|
SU1593995A1 |
| Система автоматического регулирования скольжения колес транспортного средства в тормозном режиме | 1982 |
|
SU1239001A1 |
| Система для испытания транспортных средств на топливную экономичность | 1985 |
|
SU1587367A1 |
| Устройство для автоматического регулирования скольжения ведущих колес транспортного средства | 1985 |
|
SU1586925A1 |
| Устройство для управления положением регулируемых шипов шины транспортного средства | 1985 |
|
SU1600971A1 |
| Устройство для предотвращения опрокидывания транспортного средства | 1984 |
|
SU1232510A1 |
| Устройство для отключения двигателя транспортного средства | 1991 |
|
SU1787202A3 |
| ЭЙ Автомобилестроение, 1972, Ь, с | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР № 1029527, кл | |||
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
