2. Грузоподъемник по п. 1, отличающийся тем, что он снабжен комплектом стержней, длина и наружн.ый диаметр которых равны длине и наружному диаметру поднимаемого
груза, а минимальная суммарная длина стержйей равна длине участка трубы, расположенного между загрузочной полостью и разгрузочным окном.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАЛОЭТАЖНОЕ ИНДИВИДУАЛЬНОЕ ЖИЛОЕ ЗДАНИЕ В ФОРМЕ МНОГОГРАННИКА | 2014 |
|
RU2552251C1 |
| Шахтный подъемник | 1980 |
|
SU922019A1 |
| Контейнер | 1986 |
|
SU1395560A1 |
| Устройство экстренной эвакуации людей из высотных зданий | 2017 |
|
RU2651656C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ МНОГОСЛОЙНЫХ ПАНЕЛЕЙ, МНОГОСЛОЙНАЯ ПАНЕЛЬ, РАСКЛАДНАЯ ОПАЛУБКА ДЛЯ ИЗГОТОВЛЕНИЯ МНОГОСЛОЙНЫХ ПАНЕЛЕЙ, ТЕХНОЛОГИЧЕСКАЯ ЛИНИЯ ПО ИЗГОТОВЛЕНИЮ МНОГОСЛОЙНЫХ ПАНЕЛЕЙ, СПОСОБ ВОЗВЕДЕНИЯ МОНОЛИТНО-КАРКАСНОГО ЗДАНИЯ ИЗ МНОГОСЛОЙНЫХ ПАНЕЛЕЙ С ДЕКОРАТИВНОЙ НАРУЖНОЙ ОТДЕЛКОЙ | 2012 |
|
RU2515491C1 |
| УСТРОЙСТВО И СИСТЕМА ЭКСТРЕННОГО СПУСКА ИЗ ЗДАНИЯ | 2005 |
|
RU2274481C1 |
| Транспортное средство для перевозки сыпучего или штучного груза, загружаемое из бункера с несколькими выпускными окнами | 2021 |
|
RU2774698C1 |
| Транспортируемый жилой блок-контейнер, устройство транспортирования жилого блок-контейнера и быстровозводимое здание из этих блок-контейнеров | 2022 |
|
RU2777638C1 |
| КУПОЛЬНОЕ ЗДАНИЕ И СПОСОБ СТРОИТЕЛЬСТВА КУПОЛЬНОГО ЗДАНИЯ | 2022 |
|
RU2787490C1 |
| Устройство для подачи грузов в проемы зданий | 1986 |
|
SU1463717A1 |
1. ГРУЗОПОДЪЕМНИК, предназначенный преимущественно для подъема грузов стержневого типа в проемы здания, содержащий расположенную на основании направляющую с верхним и нижним опорными элементами, имеющую загрузочное средство и связанную с приводом перемещения грузов, включающим в себя вертикальный цепной транспортер, несущий захваты, и установленный внутри направляющей ориентирующий ролик, отличающийся тем, что, с целью улучщения эксплуатационных характеристик грузоподъемника путем обеспечения возможности подачи грузов в малогабаритные проемы здания, основание выполнено с возможностью перемещения и поворота относительно указанного нижнего опорного элемента, при этом направляющая щарнирно соединена своей верхней частью со зданием, выполнена в виде трубы с загрузочной полостью в нижней части и разгрузочным окном в верхней части и снабжена расположенной над загрузочной полостью подпружиненной защелкой, причем указанный ориентирующий ролик размещен напротив разгрузочного окна, а указанный цепной транспортер - в нижней части наi правляющей, в районе ее загрузочной по(Л лости. СХ) 4 00 to
i
Изобретение относится к подъемно-транспортному машиностроению, в частности к грузоподъемникам, предназначенным преимущественно для подъема грузов стержневого типа в проемы здания.
Цель изобретения - улучшение эксплуатационных характеристик устройства путем обеспечения возможности подачи грузов в малогабаритные проемы здания.
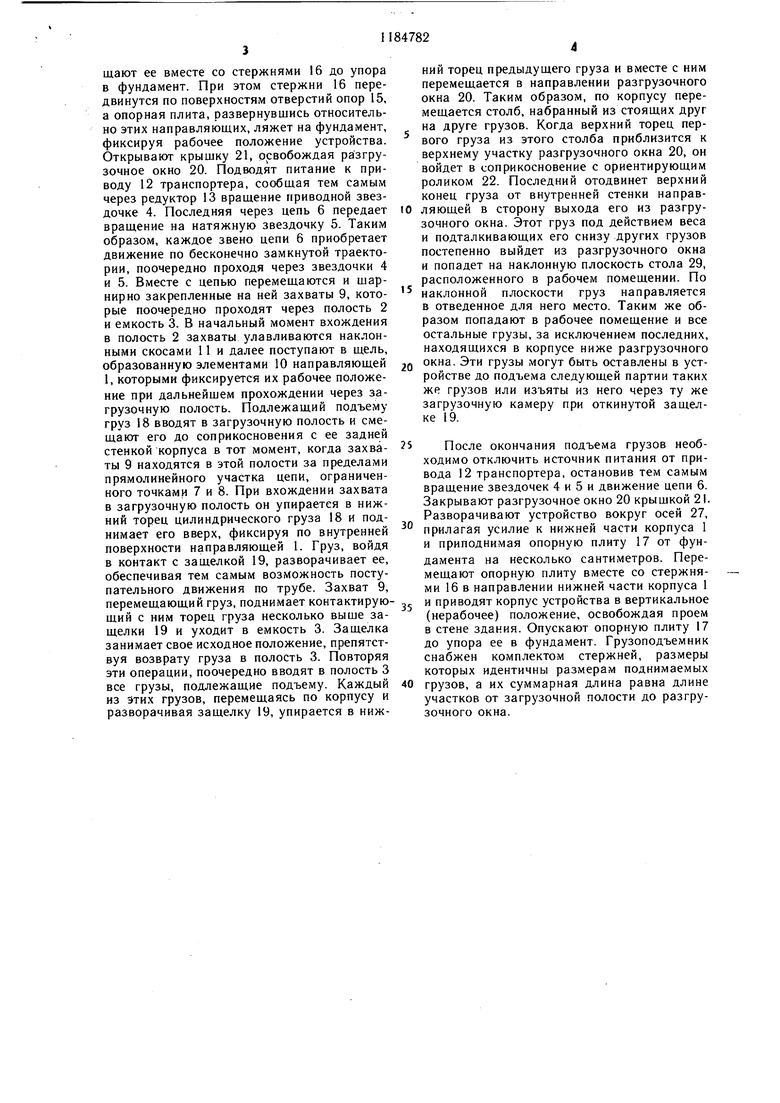
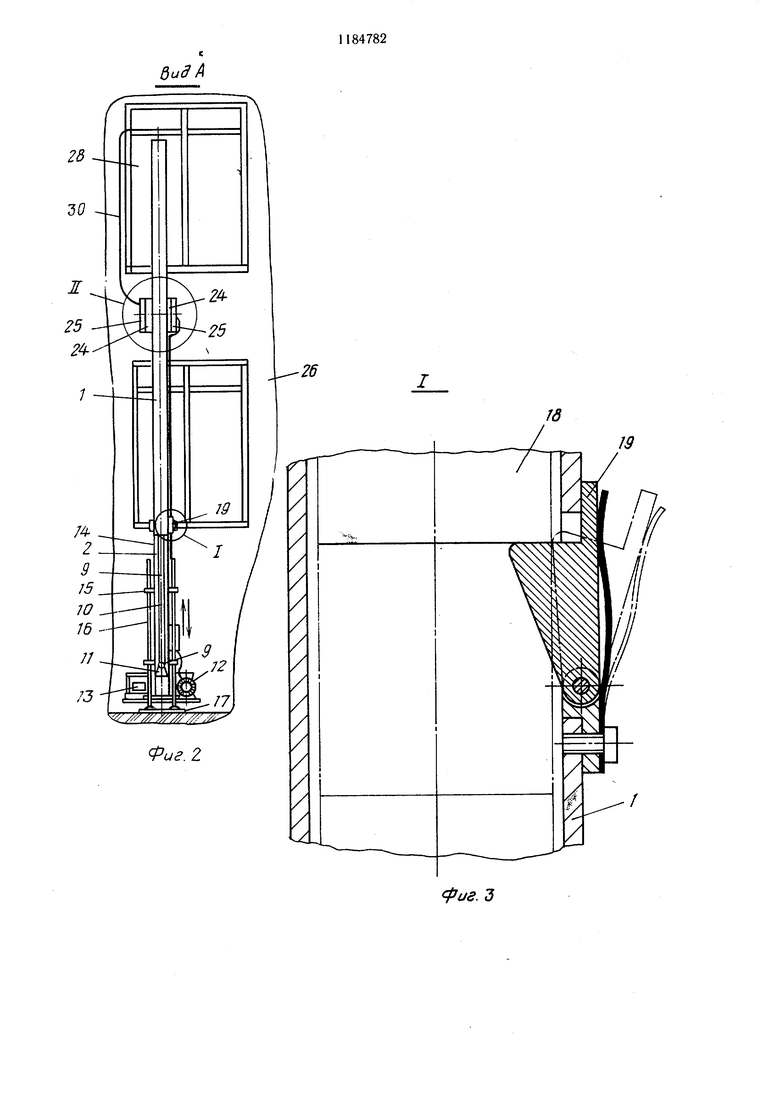
На фиг. 1 изображен грузоподъемник, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - узел I на фиг. 2; на фиг. 4 - разрез Б-Б на фиг. 1; на фиг. 5 - узел II на фиг. 2.
Грузоподъемник содержит направляющую 1 в виде трубы, в нижней части которой выполнена загрузочная полость 2 и емкость 3, в которую вмонтирован транспортер, включающий в себя приводную 4 и натяжную 5 звездочки, охваченный бесконечно замкнутой цепью 6. Прямолинейный участок цепи, расположенный между точками 7 и 8, выполнен с превышением над длиной поднимаемого груза по крайней мере в 1,1 раза. На цепи б щарнирно закреплены захваты 9, расстояние между которыми больше длины поднимаемого груза. Через щель, образованную элементами 10 направляющей 1 и соединяющую полость 2 и емкость 3, захваты 9 выведены в емкость 3. Своими боковыми поверхностями захваты 9 оперты на элементы 10 направляющей 1. В нижней части элементов 10 выполнены скосы 11. В нижней части направляющей 1 смонтированы привод 12 транспортера (электродвигатель) и редуктор 13. На боковых поверхностях 14 нижней части направляющей 1 жестко закреплены четыре опоры 15 с цилиндрическими отверстиями, продольные оси которых расположены вертикально. В отверстие опор 15 свободно введен цилиндрический направляющий стержень 16. Один из торцов каждого стержня 16 выступает за пределы направляющей 1 и шарнирно закреплен на опорной плите 17. Внутренний диаметр трубы - направляющей 1 - по меньшей мере равен ширине загрузочной полости. Внутренний диаметр трубы и ширина загрузочной полости равны 1,1 -1,6 ч. от диаметра поднимаемого груза 18. Над загрузочной полостью установлена защелка 19, щарнирно закрепленная в стенке корпуса и представляющая собой подпружиненный рычаг. В
верхней части трубы .имеется разгрузочное окно 20 с крышкой 21, шарнирно закрепленной на ее стенке. Ширина разгрузочного окна равна внутреннему диаметру трубы. На внутренней поверхности трубы, напротив верхнего участка окиа и симметрично ему, закреплен ориентирующий ролик 22. Верхний торец трубы закрыт заглушкой 23. Ниже разгрузочного окна выполнены две бобышки 24, расположенные на наружной поверхности направляющей 1 симметрично относительно ширины разгрузочного окна. В каждую из бобышек 24 через планку 25, смонтированную на стене 26 здания, установлена ось 27 с обеспечением возможности разворота корпуса вокруг этих осей. На стене здания закреплены параллельно друг другу две планки 25, а направляющая 1 с бобышками введена между ними. Расстояния между разгрузочным окном и бобышками 24, а также планками 25 и проемом 28 стене здания выбраны такими, чтобы при развороте корпуса вокруг мест его крепления обеспечивалась бы возможность вхождения в проем 28 участка трубы 1 с разгрузочны окном. Внутри здания под проемом 28 установлен стол 29 для приема грузов 18.
Поверхность стола может быть выполнена наклонной, а в проем 28 стены может быть вмонтирована упругая мембрана с прорезью под наружную поверхность участка трубы, входящего в проем. Кабель 30 для питания электродвигателя выведен из здаиия и проложен по наружной поверхности трубы.
Для того, чтобы поднять груз и подать его в помещение через проем 28 в стене 26 здания, устройство устанавливают в рабочее положение. Для этого вручную разворачивают грузоподъемник вокруг осей 27, прикладывая усилие к нижней части направляющей 1. Разворот выполняют до тех пор, пока верхний участок направляющей 1 вместе с разгрузочным окном 20 не войдет в проем 28. При наличии мембраны в проеме она войдет в соприкосновение с наружной поверхностью направляющей 1, перекрыв тем самым зазор между поверхностями проема и направляющей 1 и оставив свободным разгрузочное окно 20. После этого, прикладывая усилие к опорной плите 17, перемещают ее вместе со стержнями 16 до упора в фундамент. При этом стержни 16 передвинутся по поверхностям отверстий опор 15, а опорная плита, развернувшись относительно этих направляющих, ляжет на фундамент, фиксируя рабочее положение устройства. Открывают крышку 21, освобождая разгрузочное окно 20. Подводят питание к приводу 12 транспортера, сообщая тем самым через редуктор 13 вращение приводной звездочке 4. Последняя через цепь 6 передает вращение на натяжную звездочку 5. Таким образом, каждое звено цепи 6 приобретает движение по бесконечно замкнутой траектории, поочередно проходя через звездочки 4 и 5. Вместе с цепью перемещаются и щарнирно закрепленные на ней захваты 9, которые поочередно проходят через полость 2 и емкость 3. В начальный момент вхождения в полость 2 захваты улавливаются наклонными скосами 11 и далее поступают в щель, образованную элементами 10 направляющей 1, которыми фиксируется их рабочее положение при дальнейшем прохождении через загрузочную полость. Подлежащий подъему груз 18 вводят в загрузочную полость и смещают его до соприкосновения с ее задней стенкой корпуса в тот момент, когда захваты 9 находятся в этой полости за пределами прямолинейного участка цепи, ограниченного точками 7 и 8, При вхождении захвата в загрузочную полость он упирается в нижний торец цилиндрического груза 18 и поднимает его вверх, фиксируя по внутренней поверхности направляющей 1. Груз, войдя в контакт с защелкой 19, разворачивает ее, обеспечивая тем самым возможность поступательного движения по трубе. Захват 9, перемещающий груз, поднимает контактирующий с ним торец груза несколько выше защелки 19 и уходит в емкость 3. Защелка занимает свое исходное положение, препятствуя возврату груза в полость 3. Повторяя эти операции, поочередно вводят в полость 3 все грузы, подлежащие подъему. Каждый из 5ТИХ грузов, перемещаясь по корпусу и разворачивая защелку 19, упирается в нижНИИ торец предыдущего груза и вместе с ним перемещается в направлении разгрузочного окна 20. Таким образом, по корпусу перемещается столб, набранный из стоящих друг на друге грузов. Когда верхний торец первого груза из этого столба приблизится к верхнему участку разгрузочного окна 20, он войдет в соприкосновение с ориентирующим роликом 22. Последний отодвинет верхний конец груза от внутренней стенки направляющей в сторону выхода его из разгрузочного окна. Этот груз под действием веса и подталкивающих его снизу других грузов постепенно выйдет из разгрузочного окна и попадет на наклонную плоскость стола 29, расположенного в рабочем помещении. По
5 наклонной плоскости груз направляется в отведенное для него место. Таким же образом попадают в рабочее помещение и все остальные грузы, за исключением последних, находящихся в корпусе ниже разгрузочного
Q окна. Эти грузы могут быть оставлены в устройстве до подъема следующей партии таких же грузов или изъяты из него через ту же загрузочную камеру при откинутой защелке 19.
5 После окончания подъема грузов необходимо отключить источник питания от привода 12 транспортера, остановив тем самым вращение звездочек 4 и 5 и движение цепи 6. Закрывают разгрузочное окно 20 крышкой 21. Разворачивают устройство вокруг осей 27,
0 прилагая усилие к нижней части корпуса 1 и приподнимая опорную плиту 17 от фундамента на несколько сантиметров. Перемещают опорную плиту вместе со стержнями 16 в направлении нижней части корпуса 1
5 и приводят корпус устройства в вертикальное (нерабочее) положение, освобождая проем в стене здания. Опускают опорную плиту 17 до упора ее в фундамент. Грузоподъемник снабжен комплектом стержней, размеры которых идентичны размерам поднимаемых
грузов, а их суммарная длина равна длине участков от загрузочной полости до разгрузочного окна.
&ад А
иг. 3
| УСТРОЙСТВО для ПОДЪЕМА и ПОСАДКИ ПА ПОДВЕСНОЙ ПУТЬ ЗАКРЕПЛЕНПОГО ПА ТРОЛЛЕЯХ ГРУЗА | 0 |
|
SU173621A1 |
| кл | |||
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
