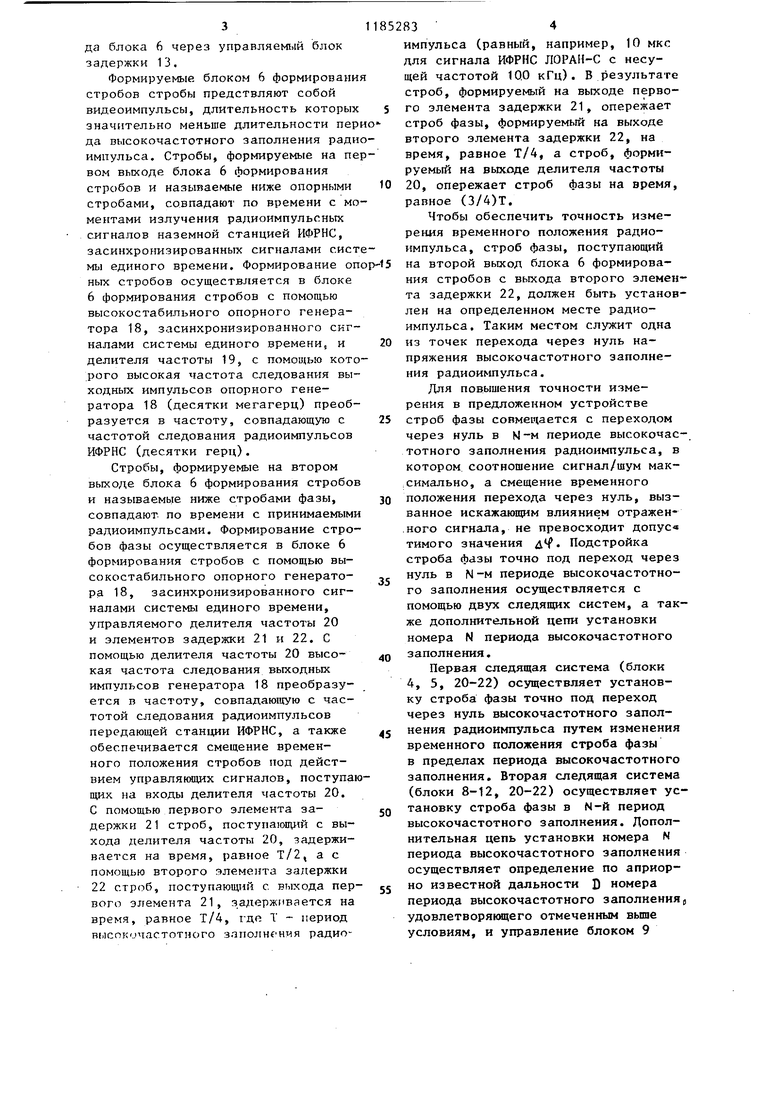
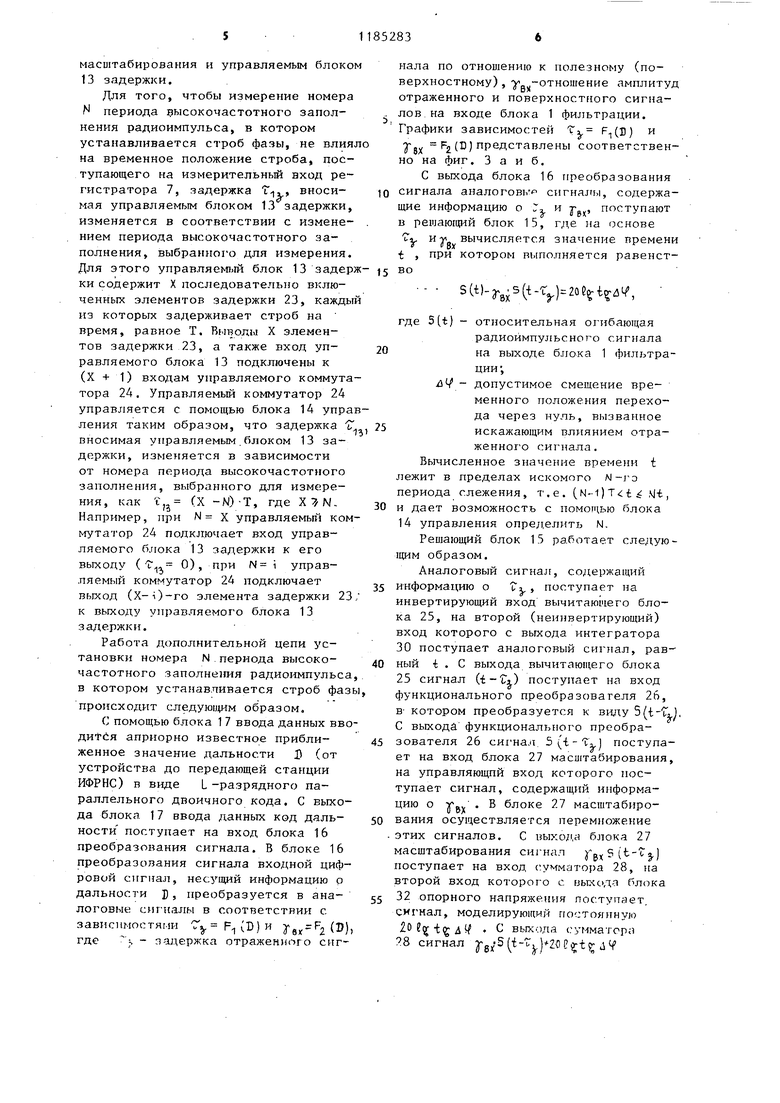
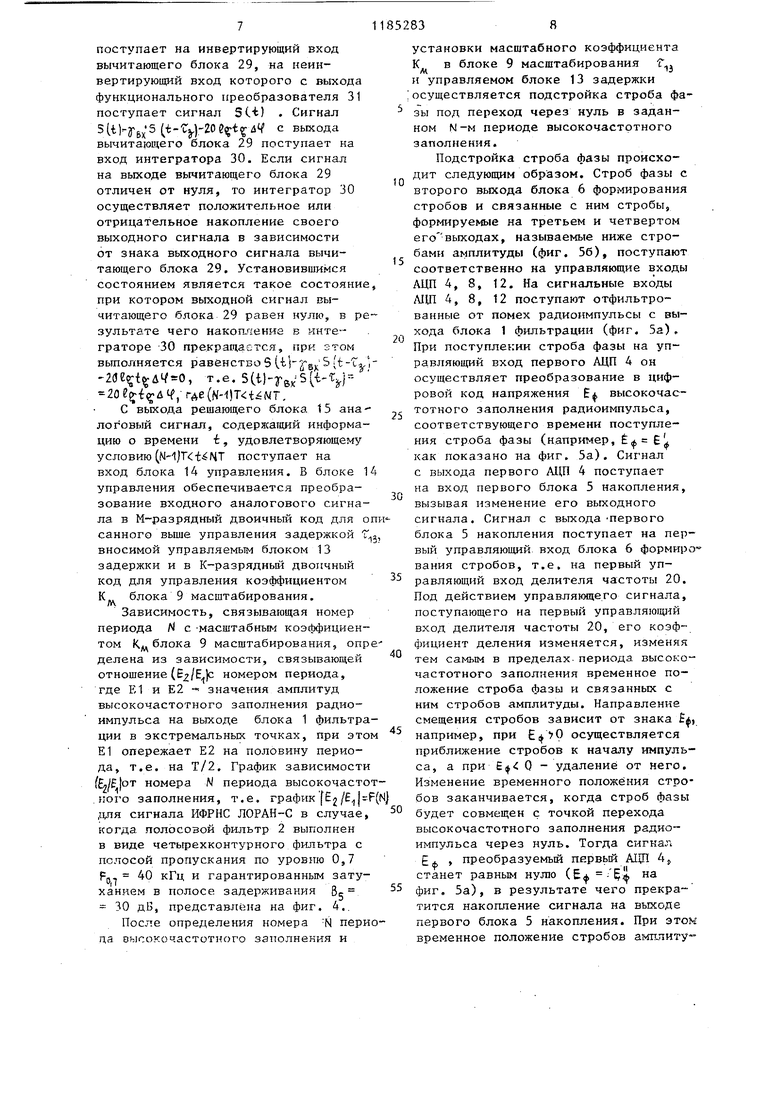
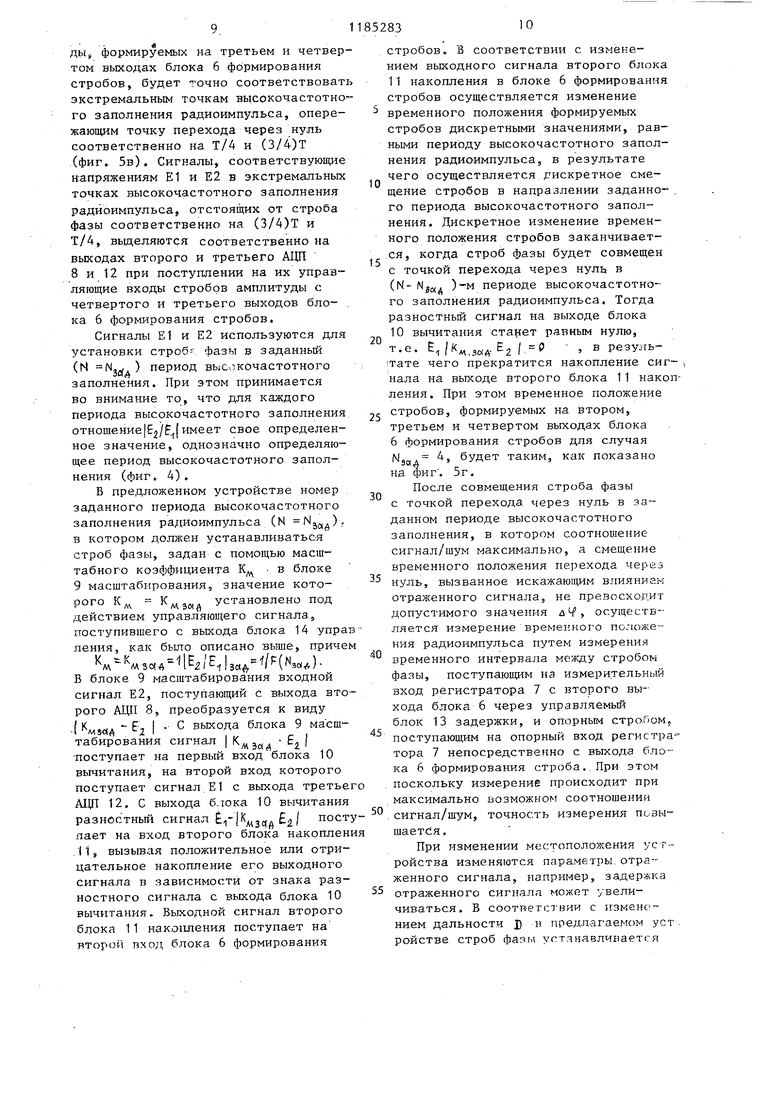
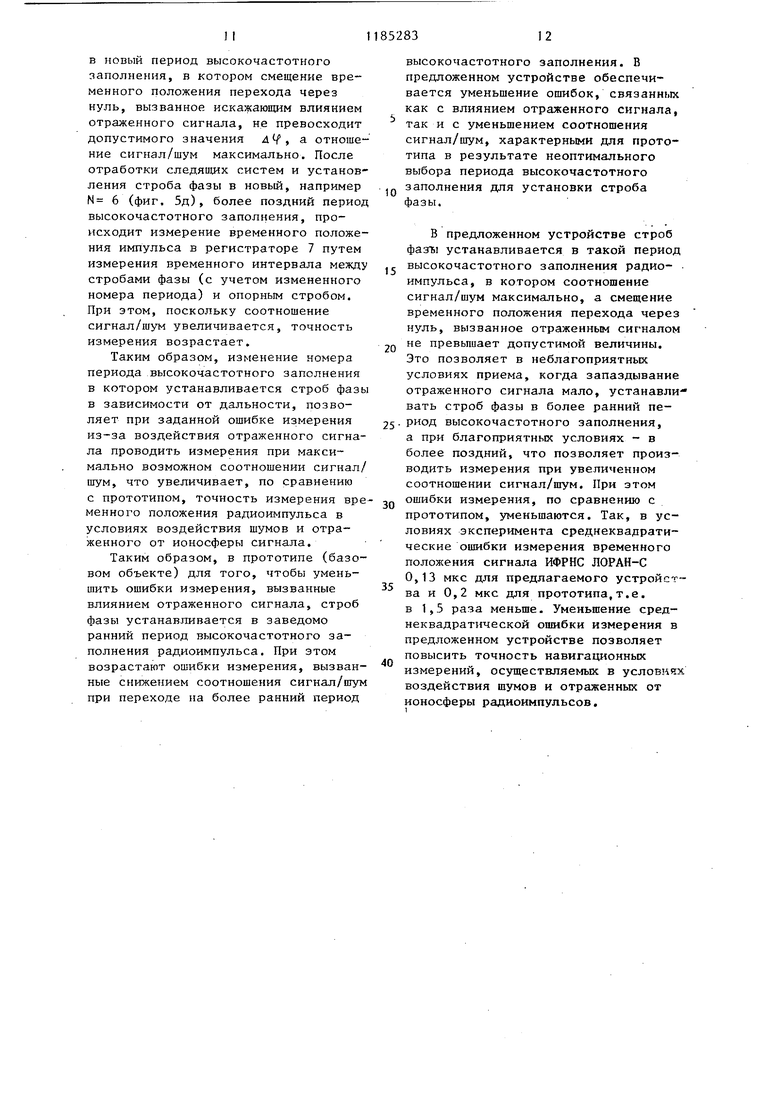
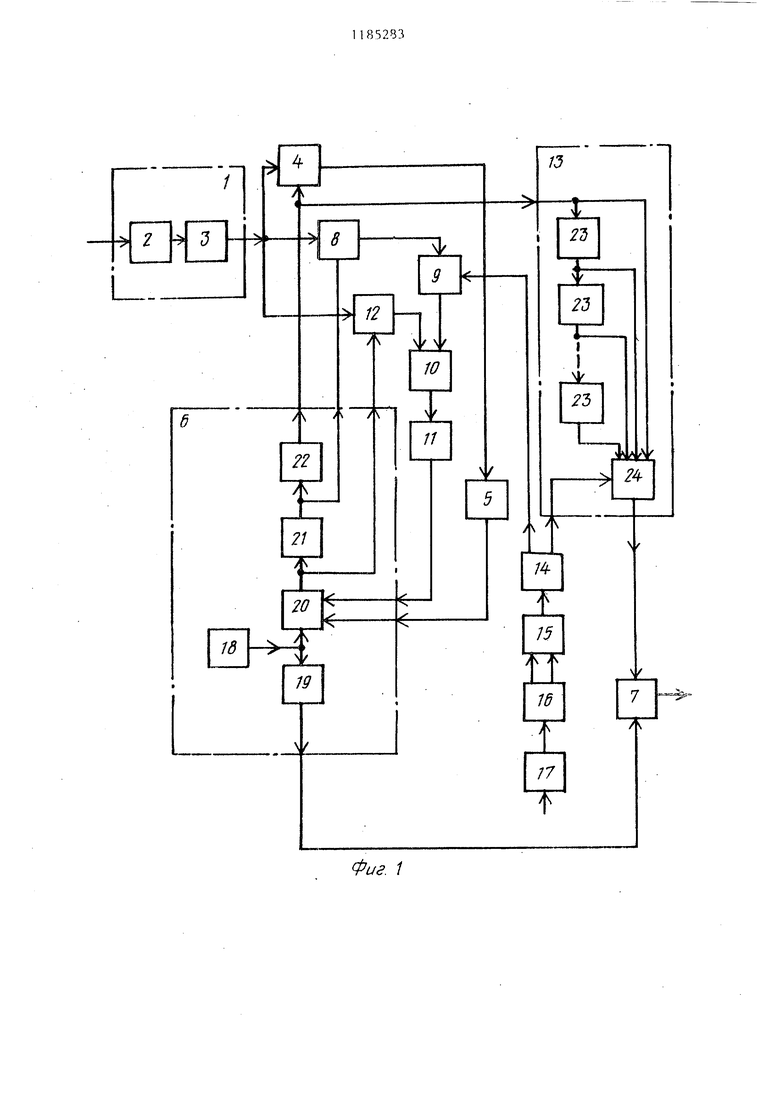
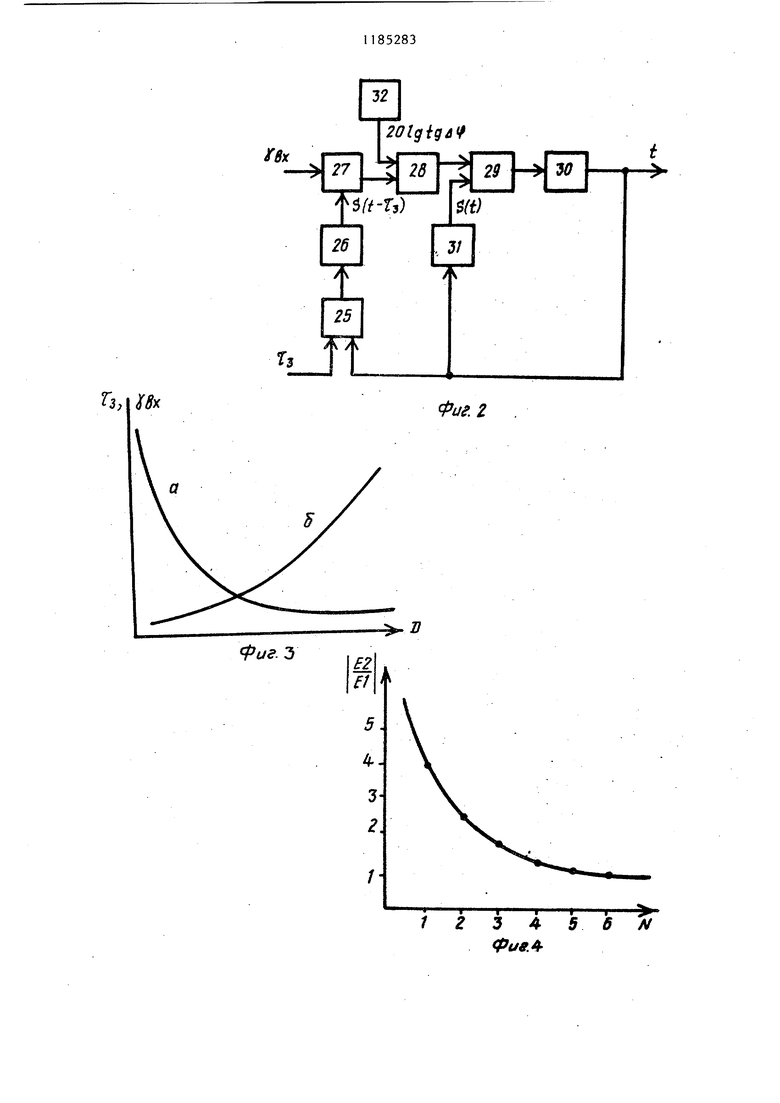
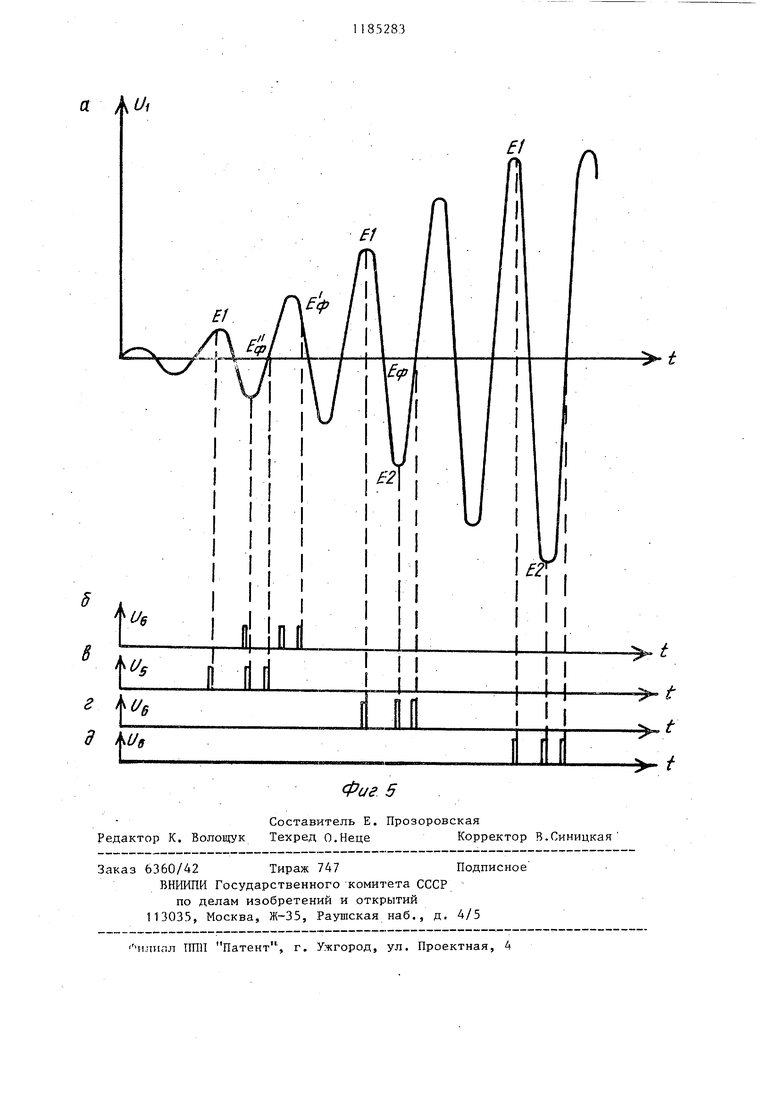
I Изобретение относится к радионавигации, а конкретнее предназначено для использования в приемоиндикаторах импульсно-фазовых радионавигационных систем (ИФРНС). Цель изобретения - повьшение точности измерения. На фиг. 1 приведена структурная электрическая схема устройства; на фиг, 2 - структурная электрическая схема решающего блока , на фиг. 3 примеры зависимостей задержки TTj(а) и отношения - амплитуд отраженного и поверхностного сигналов (б) от дальности ) J на фиг. 4 - зависи мость модуля отношения амплитуд Е2 и Е1 высокочастотного заполнения радиоимпульса в экстремальных точках от номера N периода; на фиг. 5 временные диаграммгц поясняющие положение измерительных стробов по отношению к высокочастотному заполнению радиоимпульса при работе устройства: а) высокочастотное заполнение фронта радиоимпульса на выходе блока фильтрации, б) первоначаль ное положение измерительных стробов в)промежуточное положение стробов, г)окончательное положение стробов при N 4, д) окончательное положение стробов при N 6. Устройство содержит блок фильтра ции, включающий полосовой фильтр 2 и режекторный фильтр 3, первый аналого-цифровой преобразователь (АЦП) 4, первый блок 5 накопления, блок 6 формирования стробов, регистратор 7, второй аналого-цифровой преобразователь (АЦП) 8, блок 9 масштабиро вания, блок 10 вычитания, второй блок 11 накопления, третий аналогоцифровой преобразователь (АЦП) 12, управляемый блок 13 задержки, блок 14 управления, решающий блок 15, блок 16 преобразования сигнала, блок 17 ввода данных, при этом блок 6 формирования стробов содержит опо ный генератор 18, делитель частоты 19, управляемый делитель частоты 20 и.два элемента задержки 21 и 22, а управляемый блок 13 задержки содержит X элементов задержки 23 и управляемый коммутатор 24. Решающий блок 15 содержит послед вательно соединенные вычитаюпсий бло 25,функциональньй преобразователь 26,блок 27 масштабирования, сумматор 28, второй вычитающий блок 29 3 . 2 интегратор 30, второй функциональный преобразователь 31, выход которого подключен к второму (неинвертирующему) входу вычитающего блока 29, а второй (неинвертирующий) вход вычитающего блока 25 подключен к выходу интегратора 30, являющемуся выходом блока 15. К второму входу сумматора 28 подключен блок 32 опорного напряжения. Входами решающего блока 15 являются первый (инвертирующий) вход вычитающего блока 25 и управляющий вход блока масштабирования 27. Устройство работает следующим образом. На вход устройства от антенны поступают принятые из эфира радиоимпульсные сигналы, излучаемые передатчиком наземной станции ИФРНС в строго определенные моменты времени, засинхронизированные сигналами системы единого времени. На вход устройства из эфира поступают также сигналы помех и отраженные от ионосфе ры радиоимпульсные сигналы, которые могут накладываться на полезные радиоимпульсные сигналы и искажать их. При этом время задержки f отраженного сигнала по отношению к полезному (поверхностному) зависит от дальности приема D причем, чем больше дальность, тем задержка отраженного сигнала меньше и тем большая часть полезного сигнала поражается отраженным сигналом. С входа устройства (фиг. 1) принятые сигналы поступают на вход блока 1 фильтрации. Блок 1, содержащий полосовой 2 и режекторный 3 фильтры, осуществляет фильтрацию полезного радиоимпульсного сигнала от помех. После фильтрации полезного радиоимпульсного сигнала от помех осуществляется измерение его временного положения. Измерение временного положения принятого радиоимпульса осуществляется в регистраторе 7 путем измерения временного интервала между стробами, поступающими на его опорный и измерительный входы. На опорный вход регистра 7 строб поступает непосредственно с первого выхода блока 6 формирования стробов, а на измерительный вход регистратора 7 строб поступает с;о второго выхода блока 6 через управлявший блок задержки 13. Формируемые блоком 6 формирован стробов стробы предствляют собой видеоимпульсы, длительность которы значительно меньше длительности пе да высокочастотного заполнения рад импульса. Стробы, формируемые на п вом выходе блока 6 формирования стробов и называемые ниже опорными стробами, совпадают по времени с м ментами излучения радиоимпульсных сигналов наземной станцией ИФРНС, засинхроршзированных сигналами сис мы единого времени. Формирование о ных стробов осуществляется в блоке 6 формирования стробов с помощью высокостабильного опорного генератора 18, засинхронизиропанного сиг налами системы единого времени, и делителя частоты 19 $ с помощью кот рого высокая частота следования вы ходных импульсов опорного генератора 18 (десятки мегагерц) преоб разуется в частоту, совпадающую с частотой следования радиоимпульсов ИФРНС (десятки герц). Стробы, формируемые на втором выходе блока 6 формирования стробо и называемые ниже стробами фазы, совпадают по времени с принимаемым радиоимпульсами. Формирование стро бов фазы осуществляется в блоке 6 формирования стробов с помощью высокостабильного опорного генератора 18, засинхронизированного сигналами системы единого времени, управляемого делителя частоты 20 и элементов задержки 21 и 22. С помощью делителя частоты 20 высокая частота следования выходных импульсов генератора 18 преобразуется в частоту, совпадающую с частотой следования радиоимпульсов передающей станции ИФРНС, а также обеспечивается смещение временного положения стробов под действием управляющих сигналов, поступа щих на входы делителя частоты 20. С помощью первого элемента задержки 21 строб, поступающий с выхода делителя частоты 20, задерживается на время, равное Т/2, а с помощью второго элемента задержки 22 строб, поступающий с выхода пер вого элемента 21, задерживается на время, равное Т/4, гдо Т - период высокочастотного заполнения радиоимпульса (равный, например, 10 мкс для сигнала ИФРНС ЛОРАН-С с несущей частотой 100 кГц). В результате строб, формируемый на выходе первого элемента задержки 21, опережает строб фазы, формируемый на выходе второго элемента задержки 22, на время, равное Т/4, а строб, формируемый на выходе делителя частоты 20, опережает строб фазы на время, равное (3/4)Т. Чтобы обеспечить точность измерения временного положения радиоимпульса, строб фазы, поступающий на второй выход блока 6 формирования стробов с выхода второго элемента задержки 22, должен быть установлен на определенном месте радиоимпульса. Таким местом служит одна из точек перехода через нуль напряжения высокочастотного заполнения радиоимпульса. Лля повышения точности измерения в предложенном устройстве строб фазы совмещается с переходом через нуль в N-м периоде высокочастотного заполнения радиоимпульса, в котором соотношение сигнал/шум макСимально, а смещение временного положения перехода через нуль, вызванное искажающим влиянием отраженного сигнала, не превосходит допус тимого значения f, Подстройка строба фазы точно под переход через нуль в N-м периоде высокочастотного заполнения осуществляется с помощью двух следящих систем, а также дополнительной цепи установки номера N периода высокочастотного заполнения. Первая следящая система (блоки 4, 5, 20-22) осуществляет установку строба фазы точно под переход через нуль высокочастотного заполнения радиоимпульса путем изменения временного положения строба фазы в пределах периода высокочастотного заполнения. Вторая следящая система (блоки 8-12, 20-22) осуществляет установку строба фазы в N-й период высокочастотного заполнения. Дополнительная цепь установки номера N периода высокочастотного заполнения осуществляет определение по априорно известной дальности D номера периода высокочастотного заполненияj удовлетворяющего отмеченным вьпле условиям, и управление блоком 9 маси1табирования и управляемым блоко 13 задержки. Лля того, чтобы измерение номера N периода 1зысоксчастотного заполнения радиоимпульса, в котором устанавливается строб фазы, не влия на временное положение строба, поступающего на измерительньй вход регистратора 7, задержка T-i,., вносимая управляемым блоком 13 задержки, изменяется в соответствии с изменением периода высокочастотного заполнения, выбранного для измерения. Для этого управляеШ)й блок 13 задер ки содержит X последователь}ю включенных элементов задержки 23, кажды из которых задерживает строб на время, равное Т. Выводы X злементов задержки 23, а также вход управляемого блока 13 подключены к (X +1) входам управляемого коммута тора 24, Управляемый коммутатор 24 управляется с помощью блока 14 упра ления таким образом, что задержка Г вносимая управляемым.блоком 13 задержки, изменяется в зависимости от номера периода высокочастотного заполнения, выбранного для измерения, как t,j (X -N)-T, где . Например, при N X управляемы ком мутатор 24 подключает вход управляемого блока 13 задержки к его выходу (Lii 0), при N i управляемый коммутатор 24 подключает выкод (х-О-го элемента задержки 23 к выходу управляемого блока 13 задержки. Работа дополнительной цепи установки номера N периода высокочастотного заполнения радиоимпульса в котором устанавливается строб фаз происходит следуюидим образом. С помощью блока 1 7 ввода данных вво диТйя априорно известное приближенное значение дальности II (от устройства до передающей станции ИФРНС) в виде L-разрядного параллельного двоичного кода. С выхода блока 17 ввода данных код дальности поступает на вход блока 16 преобразования сигнала. В блоке 16 преобразования сигнала входной цифровой сигнал, несущий информацию о дальности Б, преобразуется в аналоговые сигналы в соответствии с зависимостями (Б)и () где ч - задержка отраженного сигнала по отношению к полезному (поверхностному) , -у -отношение амплитуд отраженного и поверхностного сигналов на входе блока 1 фильтрации. Графики зависимостей Та, F-,(II) и Тех i() Р яставлены соответственно на фиг. 3 а и б. С выхода блока 16 преобразования сигнала аналогов / сигналы, содержащие информацию о ::, и j-, поступают в решающий блок 15, где на основе iTt, и V вычисляется значение времени при котором выполняется равенст- S(),), где 5() - относительная огибающая радиоймпульсного сигнала на выходе блока 1 фильтрации;л - допустимое смещение временного положения перехода через нуль, вызванное искажающим влиянием отраженного сигнала. Вычисленное значение времени t лежит в пределах искомого M-jo периода слежения, т.е. (N-l) Mi, и дает возможность с помогцью блока 14 управления опред,елить N. Решающий блок 15 работает следую1ЦИМ образом. Аналоговый сигнал, содержащий информацию о и J,, поступает на инвертирующий вход вычитающего блока 25, на второй (неи)шертирующий) вход которого с выхода интегратора 30 поступает аналоговый сигнал, равный i . с выхода вычитающего блока 25 сигнал (fc-Tr) поступает на вход функционального преобразователя 26, в- котором преобразуется к 5(i-rj, С выхода функционального преобразователя 26 сигнал 5(i-ii,j поступает на вход блока 27 масигтабирования, на управляющпй вход которого поступает сигнал, содержащий информацию о Т-,, . В блоке 27 масштабирования осуществляется перемножение этих сигналов. С выхода блока 27 масштабирования си)-нал Гвх ) поступает на вход сумматора 28, на второй вход которого с FJbKciAa блока 32 опорного напряжения поступает, сигнал, моделирующий постоянную . С выхода сумматора 8 сигнал () поступает на инвертирующий вход вычитающего блока 29, на неинвертирующий вход которого с выхода функционального преобразователя 31 поступает сигнал SCt) . Сигнал SUl-jgijS (i-(:j,) Л с выхода вычитающего блока 29 поступает на вход интегратора 30. Если сигнал на выходе вычитающего блока 29 отличен от нуля, то интегратор 30 осуществляет положительное или отрицательное накопление своего выходного сигнала в зависимости от знака выходного сигнала вычитающего блока 29, Установившимся состоянием является такое состояни при котором вьгходной сигнал вычитающего блока 29 равен нулю, в р зультате чего накоп.ггени8 в интеграторе 30 прекращается, при этом выполняется равенство S U -rsj;5 t-ti 2(, т.е. S(t)-ys,5(-) ,TAe(N-1)T t;eNT. С выхода решающего блока 15 ана логовый сигнал, содержащий информа цию о времени -Ь, удовлетворяющему условию (N-1) поступает на вход блока 14 управления. В блоке управления обеспечивается преобразование входного аналогового сигна ла в М-разрядный двоичный код для санного выше управления задержкой вносимой управляемым блоком 13 задержки и в К-разрядный двоичный код для управления коэффициентом К., блока 9 масштабирования. /N Зависимость, связывающая номер периода N с -масштабным коэффициен том К; блока 9 масштабирования, оп делена из зависимости, связывающей отношение (.jc номером периода, где Е1 и Е2 - значения амплитуд высокочастотного заполнения радиоимпульса на выходе блока 1 фильтр ции в экстремальных точках, при эт Е1 опережает Е2 на половину периода, т.е. на Т/2. График зависимост fb/f|oT номера N периода высокочаст , иого заполнения, т.е. график fE2/Ei| для сигнала ИФРНС ЛОРАН-С в случае когда полосовой фильтр 2 выполнен в виде четьфехконтурного фильтра с полосой пропускания по уровню 0,7 Рр- 40 кГц и гарантированным зату ханием в полосе задерживания Вд 30 дБ, представлена на фиг. 4.. После определения номера N пер да высокочастотного заполнения и установки масштабного коэффициента К в блоке 9 масштабирования Т и управляемом блоке 13 задержки осуществляется подстройка строба фазы под переход через нуль в заданном N-м периоде высокочастотного заполнения. Подстройка строба фазы происходит следующим образом. Строб фазы с второго выхода блока 6 формирования стробов и связанные с ним стробы, формируемые на третьем и четвертом его выходах, называемые ниже стробами амплитуды (фиг. 56), поступают соответственно на управляющие входы АЦП 4, 8, 12. На сигнальные входы АЦП 4, 8, 12 поступают отфильтрованные от помех радиоимпульсы с выхода блока 1 фильтрации (фиг. 5а). При поступлении строба фазы на управляющий вход первого АЦП 4 он осуществляет преобразование в цифровой код напряжения Еф высокочастотного заполнения радиоимпульса, соответствующего времени поступления строба фазы (напрг мер, E Ej. как показано на фиг. 5а). Сигнал с выхода первого АЦП 4 поступает на вход первого блока 5 накопления, вызывая изменение его выходного сигнала. Сигнал с выходапервого блока 5 накопления поступает на первый управляющий вход блока 6 формргро вания стробов, т,е, на первый управляющий вход делителя частоты 20, Под действием управляющего сигнала, поступающего на первый управляющий вход делителя частоты 20, его коэффициент деления изменяется, изменяя тем самым в пределах-периода высокочастотного заполнения временное положение строба фазы и связанных с ним стробов амплитуды. Направление смещения стробов зависит от знака ф, например, при осуществляется приближение стробов к началу импульса, а при Е| О - удаление от него. Изменение временного положения стробов заканчивается, когда строб фазы будет совмещен с точкой перехода высокочастотного заполнения радиоимпульса через нуль. Тогда сигнал Е, , преобразуемый первьй А1Щ 4 станет равным нулю (Еф на фиг, 5а), в результате чего прекратится накопление сигнала на выходе первого блока 5 накопления. При этом временное положение стробов амплитуды, формируемых на третьем и четве том выходах блока 6 формирования стробов, будет точно соответствова экстремальным точкам высокочастотн го заполнения радиоимпульса, опере жающим точку перехода через нуль соответственно на Т/4 и (3/4)Т (фиг. 5в), Сигналы, соответствующи напряжениям Е1 и Е2 в экстремальных точках высокочастотного заполнения радиоимпульса, отстоящих от строба фазы соответственно на (3/4)Т и Т/4, выделяются соответственно на выходах второго и третьего А1Щ 8и 12 при поступлении на их управляющие входы стробов амплитуды с четвертого и третьего выходов блока 6 формирования стробов. Сигналы Е1 и Е2 используются для установки строб фазы в заданный (Н N-,,. ) период выс,)кочастотного эял заполнения. При этом принимается во внимание то, что для каждого периода высокочастотного заполнения отношение|Е2/В имеет свое определенное значение, однозначно определяющее период высокочастотного заполнения (фиг. 4). В предложенном устройстве номер заданного периода высокочастотного заполнения радиоимпульса (N заАв котором должен устанавливаться строб фазы, задан с помощью масштабного коэффициента Кд . в блоке 9масштабирования, значение которого К мз«д установлено под действием управляющего сигнала, поступившего с выхода блока 14 упра ления, как было описано выше, приче (А ЯЕг|Е,(з«. Б блоке 9 масштабирования входной сигнал Е2, поступающий с выхода вто рого АЦП 8,, преобразуется к виду - ммА 1 I выхода блока 9 масштабирования сигнал I Кд j 2 f поступает на первый вход блока 10 вычитания, на второй вход которого поступает сигнал Е1 с выхода третье АЦП 12. С выхода блока 10 вычитания разностный сигнал ( 2 / пост пает на вход второго блока накоплен .11, вызывая положительное или отрицательное накопление его выходного сигнала в зависимости от знака разностного сигнала с выхода блока 10 вычитания. Выходной сигнал второго блока 11 накопления поступает на BTopoii вход блока 6 формир.ования стробов, в соответствии с изменением выходного сигнала второго блока 11 накопления в блоке 6 формирования стробов осуществляется изменение временного положения формируемых стробов дискретными значениями, равными периоду высокочастотного заполнения радиоимпульса, в результате чего осуществляется дискретное смещение стробов в направлении заданного периода высокочастотного заполнения. Дискретное изменение временного положения стробов заканчивается, когда строб фазы будет совмещен с точкой перехода через нуль в (N- Njy. )-м периоде высокочастотного заполнения радиоимпульса. Тогда разностный сигнал на выходе блока 10 вычитания станет равным нулю, т.е. EI/«м. в результате чего прекратится накопление сигнала на выходе второго блока 11 накопления. При этом временное положение стробов, формируемых на втором, третьем и четвертом выходах блока 6 формирования стробов для случая зуА будет таким, как показано на фиг . 5г. После совмещения строба фазы с точкой перехода нуль в заданном периоде высокочастотного заполнения, в котором соотношение сигнал/шум максимально, а смещение временного положения перехода через нуль, вызванное искажающим влиянием отрал енного сигнала, не превосхо.цит допустимого значения л, осуществляется измерение времезпюго положения радиоимпульса путем измерения временного интервала между стробом фазы, поступающим на измери.тельньй вход регистратора 7 с второго выхода блока 6 через управляемый блок 13 задержки, и опорным стро-бом,. поступающим на опорный вход регистратора 7 непосредственно с выхода блока 6 формирования строба..При этом поскольку измерение происходит при максимально возможном соотношении сигнал/шум, точность измерения повышается . При изменении местоположения усгройства изменяются параметры.отраженного сигнала, например, задержка отраженного сигнала может увеличиваться. В соотв-етствии с 1гзменс- нием дальности J) н предлагаемом уст ройстве строб фазы устанавлчнается
в новый период высокочастотного заполнения, в котором смещение временного положения перехода через нуль, вызванное искажающим влиянием отраженного сигнала, не превосходит допустимого значения 4V а отношение сигнал/шум максимально. После отработки следящих систем и установления строба фазы в новый, например N 6 (фиг. 5д), более поздний период высокочастотного заполнения, происходит измерение временного положения импульса в регистраторе 7 путем измерения временного интервала между стробами фазы (с учетом измененного номера периода) и опорным стробом. При этом, поскольку соотношение сигнал/шум увеличивается, точность измерения возрастает.
Таким образом, изменение номера периода высокочастотного заполнения в котором устанавливается строб фазы в зависимости от дальности, позволяет при заданной ошибке измерения из-за воздействия отраженного сигнала проводить измерения при максимально возможном соотношении сигнал/ шум, что увеличивает, по сравнению с прототипом, точность измерения временного положения радиоимпульса в условиях воздействия шумов и отраженного от ионосферы сигнала.
Таким образом, в прототипе (базовом объекте) для того, чтобы уменьшить ошибки измерения, вызванные влиянием отраженного сигнала, строб фазы устанавливается в заведомо ранний период высокочастотного заполнения радиоимпульса. При этом возрастают ошибки измерения, вызванные снижетшем соотношения сигнал/шум при переходе на более ранний период
высокочастотного заполнения. В предложенном устройстве обеспечивается уменьшение ошибок, связанных как с влиянием отраженного сигнала, так и с уменьшением соотношения сигнал/шум, характерными для прототипа в результате неоптимального выбора периода высокочастотного Q заполнения для установки строба фазы.
В предложенном устройстве строб фазы устанавливается в такой период
- высокочастотного заполнения радио- импульса, в котором соотношение сигнал/шум максимально, а смещение временного положения перехода через нуль, вызванное отраженным сигналом
Q не превьшает допустимой величины. Это позволяет в неблагоприятных условиях приема, когда запаздывание отраженного сигнала мало, устанавли вать строб фазы в более ранний пе-
5. риод высокочастотного заполнения, а при благоприятных условиях - в более поздний, что позволяет производить измерения при увеличенном соотношении сигнал/шум. При этом
„ ошибки измерения, по сравнению с прототипом, уменьшаются. Так, в условиях эксперимента среднеквадратические ошибки измерения временного положения сигнала ИФРНС ЛОРАН-С 0,13 МКС для предлагаемого устройства и 0,2 МКС для прототипа,т.е. в 1,5 раза меньше. Уменьшение среднеквадратической ошибки измерения в предложенном устройстве позволяет повысить точность навигационных измерений, осуществляемых в условиях воздействия шумов и отраженных от ионосферы радиоимпульсов.
Фиг. /
Фиг.2
иг. 3
ff
г, 1г 4 5 6 А/
ФивЛ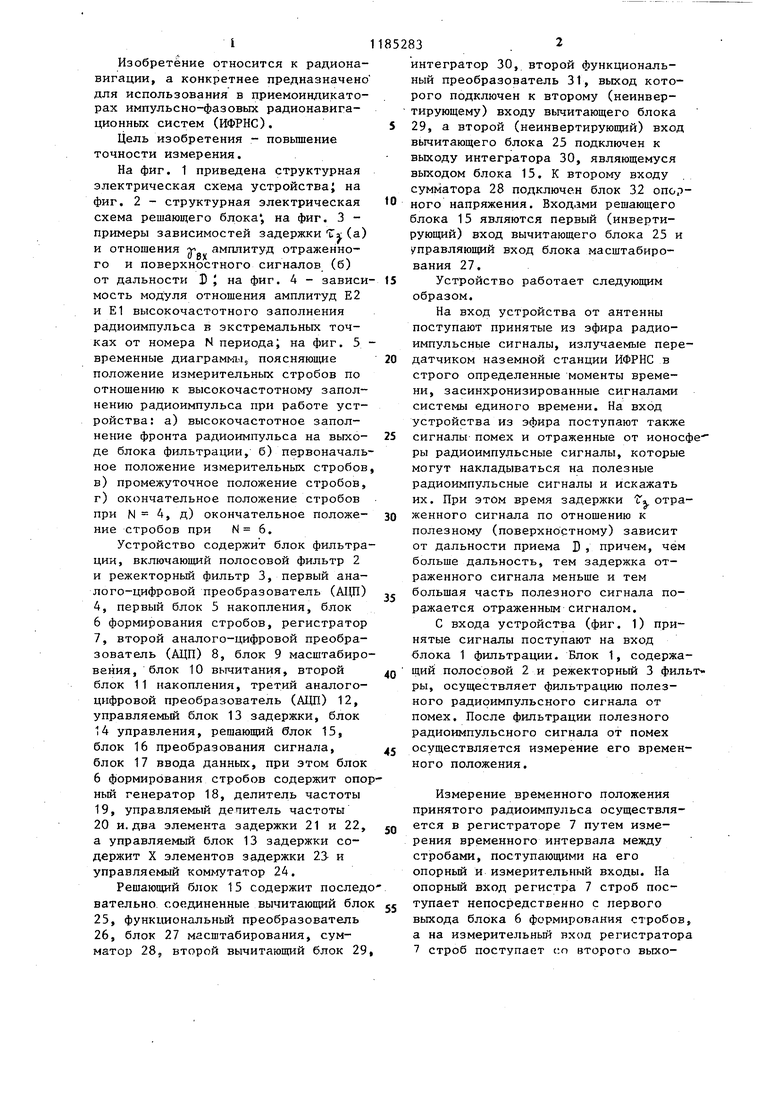
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ФОРМЫ СИГНАЛОВ ИМПУЛЬСНО-ФАЗОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ | 1997 |
|
RU2111504C1 |
| УСТРОЙСТВО ДЛЯ ПРИЕМА СИГНАЛОВ СТАНЦИИ ИМПУЛЬСНО-ФАЗОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ | 1991 |
|
RU2014630C1 |
| Устройство для измерения временного положения импульса | 1982 |
|
SU1071985A2 |
| Устройство для измерения временного положения импульса | 1980 |
|
SU934401A2 |
| ПРИЕМОКООРДИНАТОР | 1990 |
|
RU2065612C1 |
| Устройство для измерения временного положения импульса | 1981 |
|
SU958996A2 |
| Устройство для измерения формы сигналов | 1982 |
|
SU1061070A1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ВРЕМЕННЫХ ИНТЕРВАЛОВ В УСЛОВИЯХ ПОМЕХ | 1991 |
|
RU2030757C1 |
| СПОСОБ РАДИОНАВИГАЦИОННЫХ ИЗМЕРЕНИЙ В ИМПУЛЬСНО-ФАЗОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЕ | 1997 |
|
RU2115937C1 |
| Устройство для измерения временногопОлОжЕНия иМпульСА | 1979 |
|
SU830260A2 |
УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВРЕМЕННОГО ПОЛОЖЕНИЯ ИМПУЛЬСА, содержащее блок фильтрации, три аналого-цифровых преобразователя, блок масштабирования, блок вычитания, два блока накопления, регистратор и блок формирования стробов, при этом выход блока фильтрации через первый аналого-цифровой преобразователь подключен к входу первого блока накопления, выход которого подключен к первому входу блока формирования стробов, первый выход которого подключен к опорному входу регистратора, выход блока фильтрации подключен к входам первого, второго и третьего аналого-цифровых преобразователей, управляняцие входы которых соединены соответственно с вторым, третьим и четвертым выходами блока формирования стробов, второй вход которого соединен с выходом второго блока накопления, выход второго аналого-цифрового преобразователя через блок масштабирования подключен к первому входу блока вычитания, второй вход которого соединен с выходом третьего аналого-цифрового преобразователя, а выход подключен к входу второго блока накопления отличающееся тем, что, с целью повьппения точности измерения, $ в него введены последовательно сое(Л диненные блок ввода данных, блок преобразования сигнала, решающий блок и блок управления, а также управляемый блок задержки, выход которого подключен к измерительном входу регистратора, второй выход блока формирования стробов подключен к ин00 формационному входу управляемого блоел ка задержки, управлякиций вход которого соединен с первым выходом блока 00 00 управления, второй выход которого. подключен к управляющему входу блока масштабирования.
| Патент США № 3947849, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| De Lorme I,F., Tuppen A.R | |||
| Low Cost Airborne Loran-C Navigator Electrical Communication (USA), 50, 1975, № 4, p | |||
| Крутильный аппарат | 1922 |
|
SU234A1 |
