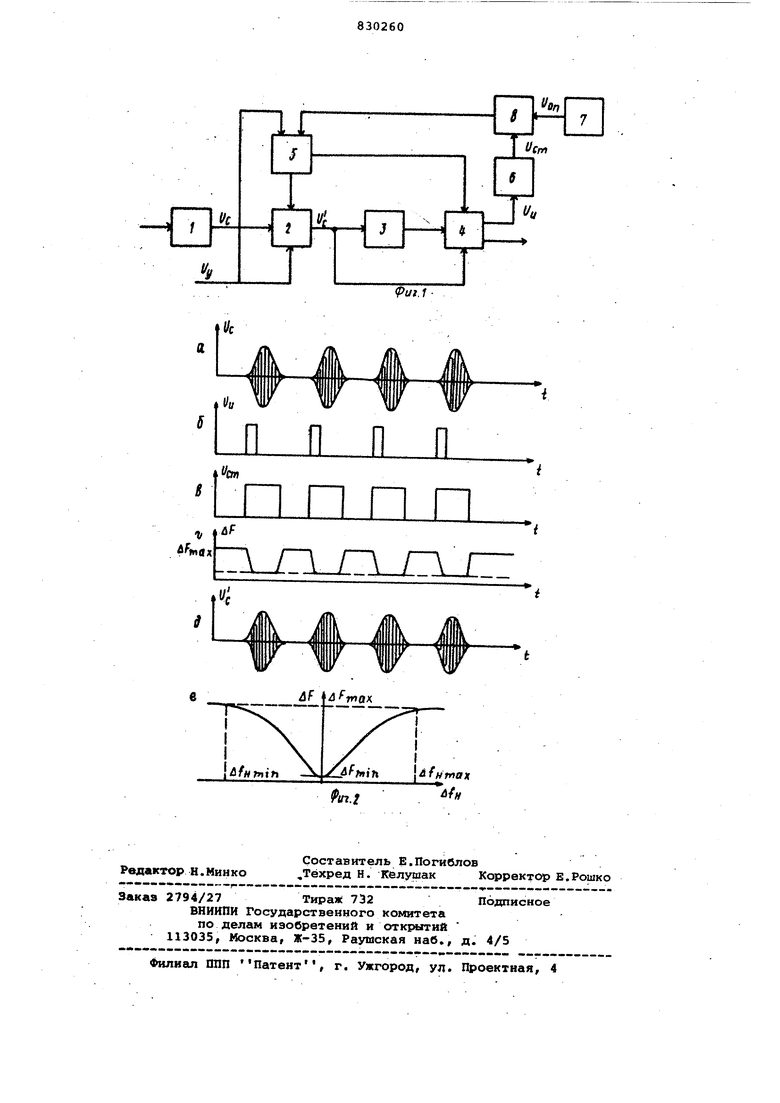
Изобретение относится к радионави гации и может использоваться в прием индикаторах импульсно-фазовых радио навигационных систем (ИФРНС). По основному авт.св. 741212 известно устройство для измерения временного положения импульса, содержащее последовательно соединенные поло совой фильтр, перестраиваемый режекторный фильтр, блок формирования отсчетной точки сигнала и измеритель временного положения импульса, второй вход которого соединен с выходом перестраиваемого режекторного фильтра, блок коррекции, вход которого соединен с первым управляющим входом перестраиваемого режекторного фильтра, один выход блока коррекции соединен с.вторым управляющим входом перестраиваемого режекторного фильтра, а другой выход - с третьим входом измерителя временного положения импульса, при этом режекторный фильт выполнен с регулируемой полосой режекции 1. Однако устройство имеет недостаточную точность при измерении врелюн ного положения сигналов, излучаеьвлх в виде временной последовательности, Цель изобретения - повышение точности измерения. Цель достигается тем, что в устройство для измерения временного положения импульса, содержащее последовательно соединенные полосовой фильтр, пepecтpaивae BJй режекторныя фильтр, блок формирования отсчетной точки сигнала и измеритель временного положения импульса, второй вход которого соединен с выходом перестраиваемого режекторного фильтра, блок коррекции, вход которого соединён с первым управляющим входом перестраиваемого режекторного фильтра, один выход блока коррекции соединен с вторым управляющим входом перестраиваемого режекторного фильтра, а другой выход - с третьим входом измерителя временного положения импульса, этом режекторный фильтр выйолиен с регулируемой полосой режекции, введены формирователь стробов и последовательно соединенные источник опорного напряжения и ключ, выход которого соединен с дополнительным входом блока коррекции; а управляющий вход через формирователь стробов соединен с выходом измерителя временного положения. На фиг.1 представлена структур- ная схема устройства на фиг.2 - графики, иллюстрирующие работу устройства. Устройство содержит последовательно соединенные полосовой фильтр 1, перестраиваемый режекторный фильтр 2, блок 3 формирования отсчетной точки сигнсша, измеритель 4 временногоположения импульса, блок 5 коррекции, формирователь б стробов, источник 7 опорного напряжения и ключ 8, Устройство работает следующим образом. На вход f режекторного фильтра 2 от антенны через полосовой фильтр 1 поступает последовательность импульсных сигналов (фиг.2 а) с несущей частотой fo и -помеха с несущей частотой f, пбпадающей в полосу пропускания полосового фильтра 1. Фильтр 2 настра ивается из своего крайнего положения (например, нгтЯ| несущую частоту помехи (ц fn) Происходит, подавление помехи и одновременно с этим иска жение полезных сигналов. Частота наст ройки, Фильтра 2 однозначно определяется управляющим напряжением Uii, поступающим на его первый вход. Отфильтрованные от помехи полезные импульсные сигналы с выхода фильтра 2 поступают на входы измерителя 4 временного положения импульса, причем на первый вход - через блок 3 формирования отсчетной точки сигнала, а на второй - непосредственно с выхода фильтра 2. В блоке 3 формирования отсчетной точки из огибающей полезног сигнала фирмируется напряжение, имеющее в пределах переднего фронта импул са переход через нуль - отсчетную точ ку . В измерителе 4 временного положени я осуществляется измерение временного положения импульса Грубо по временному положению его отсчетной точки,и Точно по фазе его высокочастотного заполнения в району отсчетной точки.. Искажения полезного сигнала, выз-у ванные прохождением сигнала через фильтр 2 и взаимным влиянием сигналов, вызывают смещение временного положения отсчетной точки и уменьшение соотнсяиения сигнал/шум, что снижает точность измерения. Точность из мерения тем выше, чем стабильнее временное положение отсчетной точки сигнала и чем больше соотношение сиг нал/шум в районе отсчетной точки у сигнала поступающеххз на второй вход измерителя 4 временного положения. Для повышения точности измере11ия слу жат формирователь 6 стробовг источни 7 опорного напряжения, ключ 8 и блок 5 коррекции, на первый вход которого подается управлякяцее напряжение Uy, на дополнительный вход - опорное нгш жение UOH от источника 7 опорного апряжения через ключ 8, который упавляется измерителем 4 временного оложения через формирователь 6 строов.. В блоке 5 коррекции формируется .. орректирующее напряжение (,(Uy, и,п ) , которое с первого ыхода блока 5 коррекции поступает на второй управляющий вход фильтра 2, изменяя его полосу режекции (,. При поступлении полезного импульсного сигнала на вход измерителя 4 временного положения на его выходе, подключенном к формирователю 6 сТробов, формируется короткий запускающий импульс, временное положение которого соответствует началу полезного сигнала ( см.фиг. 2 б). Запускающий импульс поступает на вход формирователя 6 стробов, в котором происходит формирование стробов - Видеоимпульсов,длительность которых примерно равна длительности полезного сигнала (см.фиг.2 в). Сформированные в формирователе 6 стробы поступают на управляющий вход ключа 8 и запирают его на время действия полезного импульса. При зтом в блок 5 коррекции поступает одно управляющее напряжение U, и работа предлагаемого устройства во время действия полезного сигнала происходит аналогично работе известного устройства. В этом случае в блоке 5 коррекции формируется корректирующее напряжение (из) , которое с первого выхода блока 5 коррекции поступает на второй управляющий вход фильтра 2, изменяя его полосу режекции по закону .У(Оу). (1) Так как между управляющим напряжением Uy и частотой настройки f фильтра 2 существует жесткая связь, то закон изменения полосы режекции имеет вид , .Ц (и,,)К,.,.Ч (ц ) , (2) либо в зависимости от величины расстройки фильтра 2 (Af)., ,(3) ,где afu расстройка фильтра 2 относительно несущей частоты полезного сигнала А „ „- fo .(4) Зависимость полосы режекцииг1 F от величины расстройки д „ во время действия полезного сигнала, обеспечивающая стабилизацию временного положения отсчетной точки и увеличение соотнсяиения сигнал/шум в районе отсчетной точки, .представлена на фиг.2 е. Полоса режекции уменьшается при уменьшении, модуля величины расстройки /, либо, что тоже самое, при приближении частоты
настройки ff, к несущей частоте полезного сигнала fо .
Смещение д t временного положения отсчетной точки, сформированной на переднем фронте полезного импульсного сигнала, зависит как от частотынастройки фильтра 2 {f ), так и от .ширины полосы режекции фильтра 2
(aF) . Причем смещение дЪ увеличивается как при расширении полосы режекции дР, так и при приближении частоты настройки fj, к несущей частоте полезного сигнала f, т.е. при уменшении модуля величины расстройки . Поэтому при изменении полосы режекции фильтра 2 (лГ) в зависимости от &f по заданному закону
(фиг.2 е) во время действия полезного сигнала.величина смещения t временного положения отсчетной точки, сформированной на переднем фронте сигнала-, остается постоянной
(At Atg const) и не зависит от величины расстройки. Это постоянное смещение atg вводится в измеритель 4 временного положения для координации. Для этого третий вход измерителя временного положения соединен со вторым выходом блока 5 коррекции.
Поскольку в предлагаемом устройстве полоса режекции лГ уменьшается при уменьшении модуля величины расстройки (фиг.2 е), то не происходит, также как и у известного устройства, заметного уменьшения амплитуды в районе отсчетной точки у сигнала, поступающего на второй вход измерителя 4 с выхода фильтра 2.
Для исключения взаимного влияния полезных импульсных сигналов в предлагаемом устройстве после окончания дествия полезного сигнала происходит расширение полосы режекции фильтра 2 до максимального значения. Для этого после окончания действия полезного импульсного сигнала и до прихода следующего с выхода формирователя 6 стробов на управляющий вход ключа i 8 поступает нулевой сигнал (см.фиг. 2.в), который отпирает ключ 8. В этом случае в блок 5 коррекции поступают два напряжения: И-у и оп блоке 5 коррекции осуществляется суммирование этих напряжений.
Так как напряжение UQH намногобольше Uy f то сумма , примерно равняется 13 , При этом выходное напряжение блока 5 коррекции уже не зависит от частоты настройки фильтра 2 , а постоянна и максимально
(Uon) икорп,лч. (5)
Полоса режекции фильтра 2 при этом также не зависит от частоты настройки f 1 , а постоянна и макси(и альна
дР К., 5-6 кГц, (6) (см.фиг.2 г ).
Расширение полось) режекции фильтра 2 до максимашьного значения после окончания действия полезного сигнала сокращает более , чем в 10 раз по
0 сравнению с известным длительность переходного процесса, возникающего при прохождении сигнала через фильтр 2 при малых величинах его расстройки . Поскольку задний фронт .полезных импульсов сигналов на выхо5де фильтра 2 в устройстве не затяиут (см.фиг.2 д), то исключается влияние первых сигналов на последующие. Передние фронты полезных сигналов в предлагаемом устройстве не искажены пре0дыдущими сигналами. Отсутствует дополнительное смещение временного положения отсчетной точки, вызванное взаимным влиянием импульсов, улучшается по сравнению с известным соЬт5ношение сигнал/шум. Все это повышает по сравнению с известным точность определения временного положения сигналов, излучаемых в виде временной последовательности; импульсов (например, сигналов ИФРНС Лоран -С).
0 Кроме того, предлагаемое устройство уменьшает искажения полезных импульсных сигналов при наличии сигналов ИФРНС с другой частотой следования, так как задние фронты этих сигналов
5 не затянуты и вероятность искажения ими передних фронтов полезных импульсных сигналов значительно меньше, чем у известного.
0
Формула изобретения
Устройство для измерения временного положения импульса по авт.св. № 741212, отличающееся
5 тем, что, с целью повышения точности измерения, в него введены формирователь стробов и последовательно соединенные источник опорного напряжения и ключ, выход которого соединен с дополнительным входом блока коррекции
0 а управляющий вход через формирователь стробов соединен с выходом измерителя временного положения.
Источники информации,
5 принятые во внимание при экспертизе
1. Авторское свидетельство СССР 741212, кл, G 01 S 3/10,h 04 В 1/10 03.07.78 (прототип).
VOn
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения временного положения импульса | 1978 |
|
SU741212A1 |
| Устройство для измерения временного положения импульса | 1981 |
|
SU958996A2 |
| УСТРОЙСТВО ДЛЯ ПРИЕМА СИГНАЛОВ СТАНЦИИ ИМПУЛЬСНО-ФАЗОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ | 1991 |
|
RU2014630C1 |
| Устройство для измерения временного положения импульса | 1978 |
|
SU769484A2 |
| Устройство для измерения временного положения импульса | 1980 |
|
SU894630A2 |
| СПОСОБ СНИЖЕНИЯ НИЖНЕЙ ГРАНИЦЫ ИЗМЕРЕНИЯ МАЛЫХ ВЫСОТ ДО НУЛЯ И УСТРОЙСТВО КОГЕРЕНТНОГО ИМПУЛЬСНО-ДОПЛЕРОВСКОГО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2008 |
|
RU2412450C2 |
| Устройство для измерения временного положения импульса | 1984 |
|
SU1185283A1 |
| Устройство для измерения временногопОлОжЕНия иМпульСА | 1979 |
|
SU836610A2 |
| УСТРОЙСТВО ДЛЯ ПРИЕМА СИГНАЛОВ СТАНЦИИ ИМПУЛЬСНО-ФАЗОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ | 1991 |
|
RU2014629C1 |
| Устройство для измерения временного положения импульса | 1980 |
|
SU934401A2 |
H
