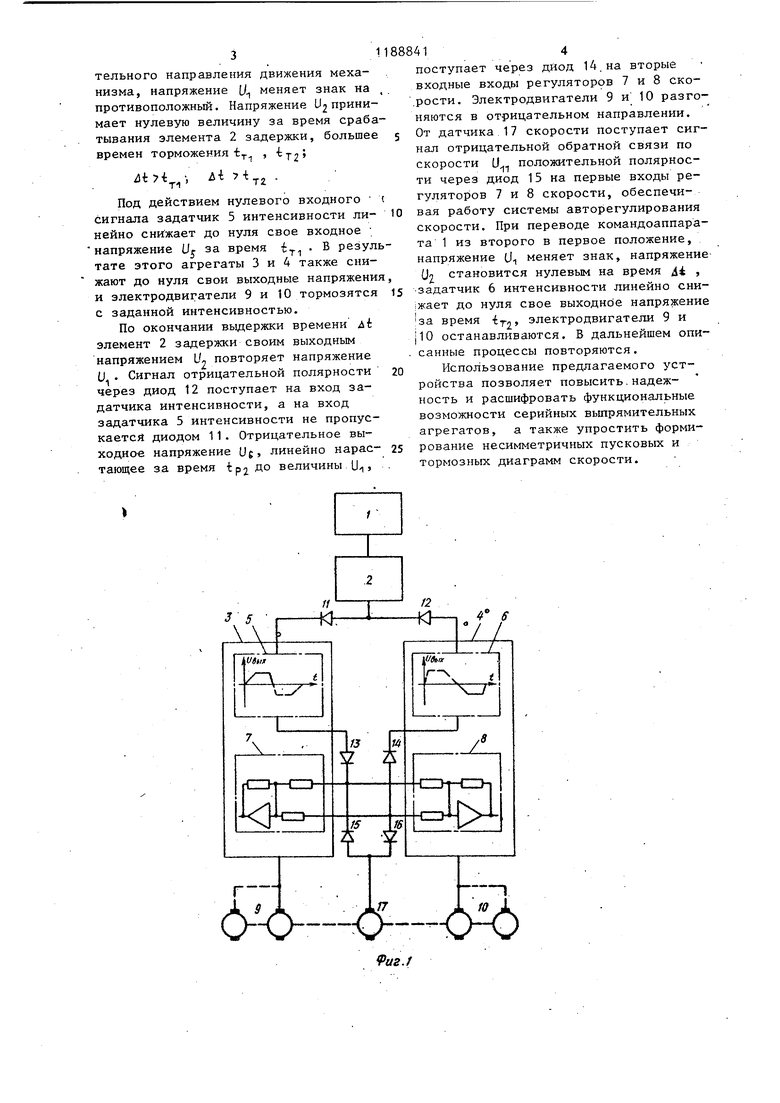
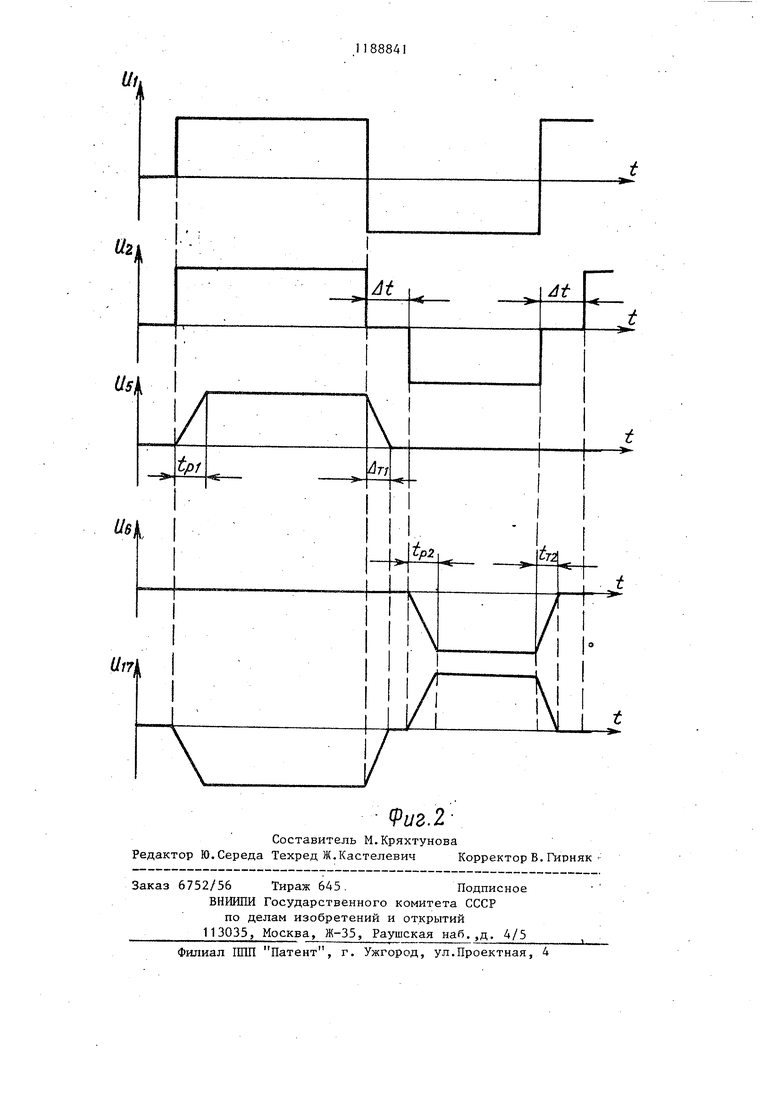
1 Изобретение относится к реверсив ным многодвигательным электроприводам постоянного тока, основанным на сравнении измеренной скорости вращен с заданным физическим параметром, np имущественно с несимметричными диаграммами разгона и торможения при пря мом и реверсивном вращении, и может быть использовано в многодвигательны пр 1водах постоянного тока механизмов поворота эксплуатационных и погрузочн-о-транспортньЪс -машин, кранов, ва ков прокатных станков и других ана.логичньос маший и механизмов. Цель изобретения - повышение надежности электропривода, На ,фиг. 1 изображена функциональная схема устройства для регулирования скорости реверсивного многодвигательного электропривода постоянного тока; на фиг,2 диаграммы напряжений на выходах эле ментов электропривода для регулиров ния скорости реверсивного многодвиг тельного электропривода постоянного тока. Многодвигательный электропривод содержит командоаппарат 1, элемент 2 задержки, два тиристорных преобра зовательных агрегата 3 и 4, имеющие в своем составе задатчики 5 и о интенсивности и регулятсры .7 и 8 скорости. Агрегаты 3 и А являются источник ми питания групп приводных электродвигателей 9 и 10 постоянного тока, соединенных между собой параллельно (как показано на фиг, 1) или последовательно , Выход командоаппарата 1 соединен свходом элемента 2 задержки в качестве которого может быть использовано, например, реле времени с выдержкой на отключение. Выход элемента 2 задержки через противоположно включенные первый и второй диоды 11 и 12 соединен с входами пер вого и второго задатчиков 5 и 6 интенсивности. Выход задатчика 5 интен 1сивности через третий диод 13, включенный согласно с первым диодом 11, соединен с первыми (верхними по схеме) входами регуляторов скорости 7 и В. Выход задатчика 6 интенсивности через четвертый диод 14, включенный согласно с вторым диодом 12, соединен с вторыми (нижними по схеме) вхо дами регуляторов 7 и 8 скорости, :Пятый диод 15 и шестой диод 16 соеА1динены своими разноименными выводами между собой и с датчиком 17 скорости. Другие выводы диодов 15 и 16 соединены с одноименными им выводами диодов 13 и 14, Многодвигательный электропривод работает следующим образом. По технологии работы электропривода требуется получение несимметричных пусковой и тормозной диаграмм скорости, например, как показано на фиг, 2, время разгона -fcp , ip и торможения ij Ti различных направлений вращения связи соотношениями 1 4241 2 SiЧ. Предварительно первый задатчик 5 интенсивности настраивают при положительном входном напряжении на отработку времени разгона ip и тормолсения t, а второй зйдатчик 6 интенсивности при отрицательном выходном напряжении на отработку времени. При переводе командоаппарата 1 из нулевого положения в первое положение, соответствующее заданию условно положительного напряжения движения механизма, на выходе командоаппарата 1 ступенчато появляется положительное напряжение J (фиг. 2), Величина и форма напряжения мгновенно повторяются выходным напряжением U элемента 2 задержки. Напряжение (Jj через диод 11 поступает на вход задатчика 5 интенсивности, а диодом 12, включенным в непроводящем направлении, не пропускается на вход задатчика 6 интенсивности. Под действием ступенчатого входного Напряжения U2 задатчик 5 интенсивности формирует на своем выходе напряжение Ug , линейно нарастающее за время tp до величины, равной (. Положительное напряжение U г-через диод. 13 поступает на первые входы регуляторов 7 и 8 скорости, при этом электродвигатели 9 и 10, получая питание от агрегатов 3 и 4, разгоняются в положительном направлении с заданной интенсивностью. От датчика 17 скорости поступает напряжение отрицательной обратной связи по скорости , отрицательной полярности через диод 16 на вторые входы регуляторов 7 и 8 скорости, обеспечивая работу системы авторегулирования скорости. При переводе командоаппарата 1 из первого во второе положение, соответствующее задание условно отрица3тельного направления движения механизма, напряжение (j-, меняет знак на противоположный. Напряжение U2принимает нулевую величину за время сраба тывания элемента 2 задержки, большее времен торможения t , fc-j-j , л Чг Под действием нулевого входного сигнала задатчик 5 интенсивности линейно снижает до нуля свое входное ; напряжение Uj за время i . В резул тате этого агрегаты 3 и 4 также снижают до нуля свои выходные напряжени и электродвигатели 9 и 10 тормозятся с заданной интенсивностью. По окончании выдержки времени Ai элемент 2 задержки своим выходным напряжением LL повторяет напряжение и . Сигнал отрицательной полярности через диод 12 поступает на вход задатчика интенсивности, а на вход задатчика 5 интенсивности не пропускается диодом 11. Отрицательное выходно-е напряжение Ut линейно нарастающее за время tpj до величины U-, 414 поступает через дИод 14 на вторые входные входы регуляторов 7 и 8 ско.рости. Электродвигатели 9 и 10 разгоняются в отрицательном направлении. От датчика 17 скорости поступает сигнал отрицательной обратной связи по скорости положительной полярности через диод 15 на первые входы регуляторов 7 и 8 скорости, обеспечивал работу системы авторегулирования скорости. При переводе командоаппарата 1 из второго в первое положение, напряжение (J меняет знак, напряжение Uj становится нулевым на время 44 , задатчик 6 интенсивности линейно сни:жает до нуля свое выходное напряжение за время ir, электродвигатели 9 и 10 останавливаются. В дальнейшем описанные процессы повторяются. Использование предлагаемого устройства позволяет повысить.надежность и расшифровать функциональные возможности серийных выпрямительных агрегатов, а также упростить формирование несимметричных пусковых и тормозных диаграмм скорости.
Xiir
| название | год | авторы | номер документа |
|---|---|---|---|
| Многодвигательный электропривод | 1983 |
|
SU1280690A1 |
| Электропривод постоянного тока с реверсором | 1991 |
|
SU1826117A1 |
| Устройство для управления электроприводом | 1982 |
|
SU1051680A1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД МНОГОКРАТНОГО ПРЯМОТОЧНОГО ВОЛОЧИЛЬНОГО СТАНА | 1997 |
|
RU2158469C2 |
| Система автоматического управления шахтной подъемной машиной с асинхронным электроприводом | 1979 |
|
SU893778A1 |
| Многодвигательный электропривод | 1991 |
|
SU1774457A1 |
| Многодвигательный частотно-регулируемый электропривод | 1988 |
|
SU1598256A1 |
| СПОСОБ УПРАВЛЕНИЯ МНОГОДВИГАТЕЛЬНЫМ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2074503C1 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОДЪЕМА И ОПУСКАНИЯ ГРУЗА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298520C2 |
| Многодвигательный электропривод | 1990 |
|
SU1818676A1 |
МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД, содержащий две группы электродвигателей, валы которых соединены с датчиком скорости, два выпрямительных агрегата, каждый из которых включает задатчик интенсивности и регулятор скорости, выход каждого из которых подключен к соответствующей группе электродвигателей, и командоаппарат, отличающийся тем, что, с целью повьсиения надеж- кости, в него введены элемент задержки и шесть диодов, причем командоаппарат включен последовательно с элементом задержки, выход которого соединен с входами первого и второго задатчиков интенсивности через противоположно включенные первый и второй диоды, выход первого задатчика интенсивности через третий диод, включенный согласно с первым, соединен с первыми входами регуляторов cкopocтиJ выход второго задатчика интенсивности с S через четвертый диод, включенн{ 1й согласно с BTopbiM, соединен с вторыми (Л входами регуляторов скорости выпрямительных агрегатов, выход датчика скорости соединен с разноименными выводами пятого и шестого диодов, дру- гие выводы которых соединены с одноименными выводами третьего и четвертого диодов. 00 00 оо ни
| Многодвигательный электропривод | 1977 |
|
SU828354A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Агрегаты преобразовательные серии АТРК | |||
| Техническое описание и инструкция по эксплуатации | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
