Целью изобретения является повышение точности выравнивания нагрузки между электродвигателями.
Это достигается тем, что в предлагаемом электроириводе второй вход регулятора выравнивания нагрузки каждого электродвигателя связан с датчиком якорного тока следующего электродвигателя по кольцевой схеме.
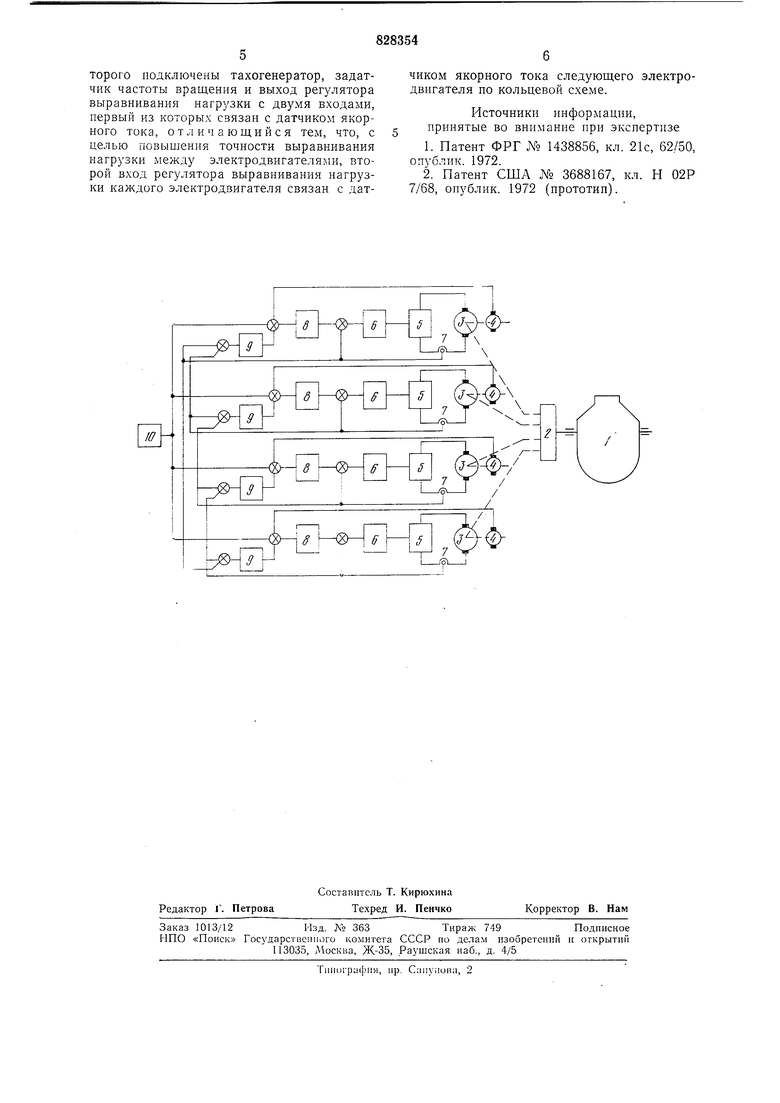
На чертеже представлена блок-схема многодвигательного электропривода.
Механизм поворота корпуса конвертора 1 соединен механически через редуктор 2 с электроприводами постоянного тока, каждый из которых содержит электродвигатель 3, связанный с тахогенератором 4 (датчик частоты вращения), причем якорь электродвигателя 3 подключен к регулируемому источнику 5 питания, в качестве которого могут быть использованы тиристорные преобразователи с системами фазового управления. Входы источников 5 присоединены к выходам регуляторов 6 якорного тока, входы которых соединены: один с выходом датчика 7 якорного тока, а другой - с выходом регулятора 8 частоты вращения. Входы регуляторов 8 соединены: первый - с датчиком частоты вращения - тахогенератором 4, второй - с выходом регулятора 9 выравнивания нагрузки, а третий - с выходом задатчика 10 частоты вращения. Входы регуляторов 9 подключены: один - к выходу датчика 7 (нагрузки) того электродвигателя 3, к входу регулятора 8 которого присоединен выход данного регулятора 9, а другой - к выходу датчика 7 другого электродвигателя 3. Таким образом, образуется кольцевая схема выравнивания нагрузки приводных электродвигателей.
Многодвигательный электропривод работает следующим образом.
В рабочем режиме при наличии сигнала на выходе задатчика 10 регуляторы 8, воздействуя через регуляторы 6 на управляемые источники 5, обеспечивают поддержание частоты вращения электродвигателей 3 в соответствии с заданием. При этом каждый регулятор 9 производит непрерывное сравнение токов нагрузки двух соседних по схеме электродвигателей 3, причем ток нагрузки каждого электродвигателя 3 непрерывно сравнивается с токами нагрузки двух соседних по схеме электродвигателей - предыдущего и последующего. Если ток нагрузки какого-либо из электродвигателей 3 станет отличным от токов нагрузки остальных электродвигателей 3, то на выходе двух соседних ио схеме регуляторов 9 появятся сигналы соответствующей величины и знака, которые произведут коррекцию задания регуляторам 9 данного электродвигателя 3 и электродвигателя 3, являющегося предыдущим по схеме по отношению к данному, для выравнивания нагрузок этих электродвигателей 3.
Если по окончании выравнивания нагрузок рассмотренных двух соседних по схеме алектродвигателей 3 их нагрузки будут отличаться от нагрузок других электродвигателеи 3, то в действие вступят другие регуляторы 9, что в результате приведет к выравниванию нагрузок меладу всеми электродвигателями 3 многодвигательного электропривода.
Таким образом, выравнивание нагрузок электродвигателей будет происходить при отклонении в любую сторону тока нагрузки любого из электродвигателей, входящих в состав многодвигательного электропривода, причем, в общем случае, это сопровождается коррекцией частоты вращения всех электродвигателей.
Многодвигательный электропривод остается работоспособным при выходе из строя
любого из входящих в его состав приводных электродвигателей 3, при этом необходимо одновременно с отключением аварийного электродвигателя 3 вывести из работы регулятор 9, выход которого подключей к входу регулятора 8 предыдущего электродвигателя 3 по схеме по отношению к аварийному, а вход которого подключен к датчику 7 аварийного электродвигателя 3. Выравнивание нагрузок, оставщихся в работе электродвигателей 3, будет производиться также путем коррекции задания регулятором 8 от регуляторов 9, отличие заключается только в том, что в процессе выравнивания нагрузок электродвигателей 3
частота вращения предыдущего электродвигателя 3 по отношению к аварийному не корректируется, т. е. этот электродвигатель 3 становится ведущим по частоте вращения в рассматриваемом многодвигательном
электроприводе в этом режиме работы.
Таким образом, использование изобретения позволяет путем коррекции задания частоты вращения индивидуальным регулятором частоты вращения электродвигателей
многодвигательного электропривода обеспечить равномерное распределение нагрузки между электродвигателями во всех режимах работы механизма, как при работе всех электродвигателей, так и при выходе
из строя любого из них, благодаря чему увеличивается срок службы электродвигателей и достигается большая надежность работы электрооборудования и механизма.
Формула изобретения
Многодвигательный электропривод со связанными общей нагрузкой электроприводами постоянного тока, содержащими
каждый электродвигатель с тахогенератором и регулируемым источником питания, цепь управления которого связана с выходом регулятора тока, к выходу которого подключены датчик якорного тока и выход
регулятора частоты вращения, к входу которого подключены тахогенератор, задатчик частоты вращения и выход регулятора выравнивания нагрузки с двумя входами, первый из которых связан с датчиком якорного тока, отличающийся тем, что, с целью повышения точности выравнивания нагрузки между электродвигателями, второй вход регулятора выравнивания нагрузки каждого электродвигателя связан с датчиком якорного тока следующего электродвигателя по кольцевой схеме.
Источники информации, принятые во внимание при экспертизе
1.Патент ФРГ № 1438856, кл. 21с, 62/50, опублик. 1972.
2.Патент США № 3688167, кл. Н 02Р 7/68, опублик. 1972 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Многодвигательный электропривод | 1980 |
|
SU928581A1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2326488C1 |
| Многодвигательный электропривод | 1985 |
|
SU1348979A1 |
| Многодвигательный электропривод | 1983 |
|
SU1115192A1 |
| Многодвигательный электропривод поточной линии | 1977 |
|
SU858196A1 |
| Многодвигательный электропривод | 1991 |
|
SU1774457A1 |
| Многодвигательный электропривод постоянного тока для поточной линии с перематывающим механизмом | 1983 |
|
SU1160520A1 |
| Способ автоматического распределения нагрузок в многодвигательном электроприводе прокатного стана | 1987 |
|
SU1511839A1 |
| Многодвигательный электропривод агрегата непрерывной обработки материала | 1980 |
|
SU1064850A1 |
| Устройство для управления многодвигательным электроприводом механизма передвижения роторного экскаватора | 1987 |
|
SU1465932A1 |
1I1I--Ijfcy 1
МН ff Н I (1
I1/т ™
