оо со
00
Изобретение относится к устройствам для захвата, подъема и транспортировки грузов и может быть использовано в любой отрасли народного хозяйства, связанной с погрузочноразгрузочными работами, выполняемыми преимущественно манипуляторами по заданной программе в автоматическом режиме.
Целью изобретения является повышение надежности.
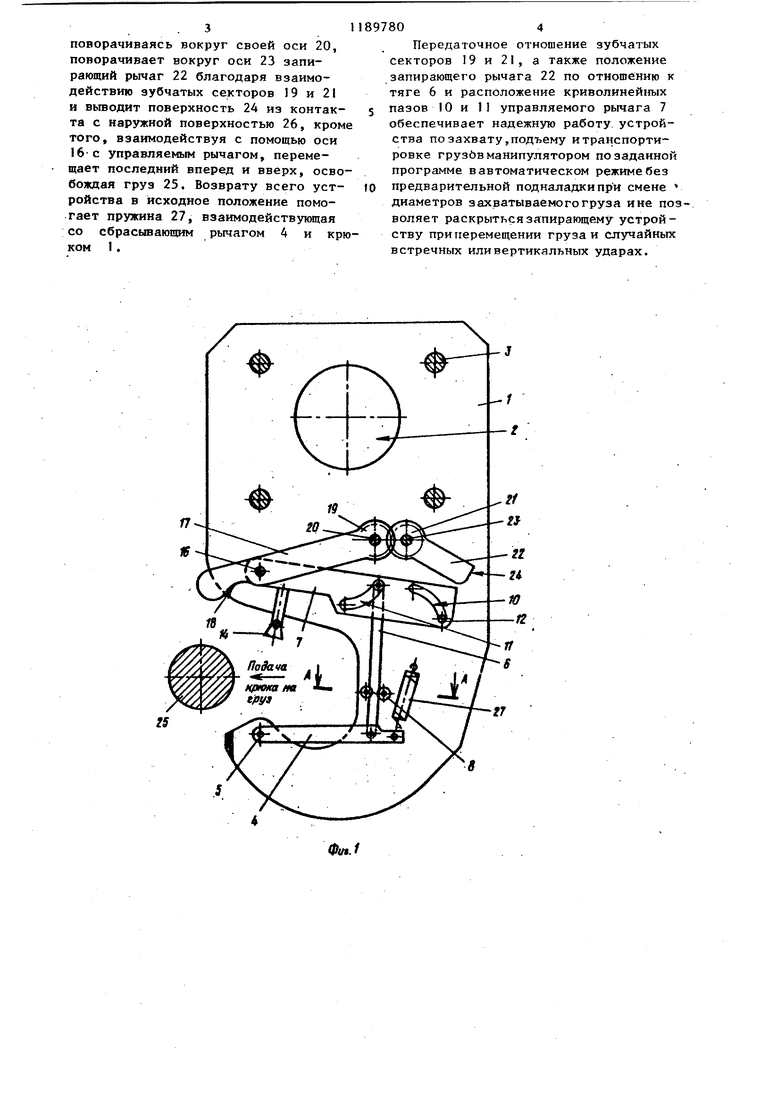
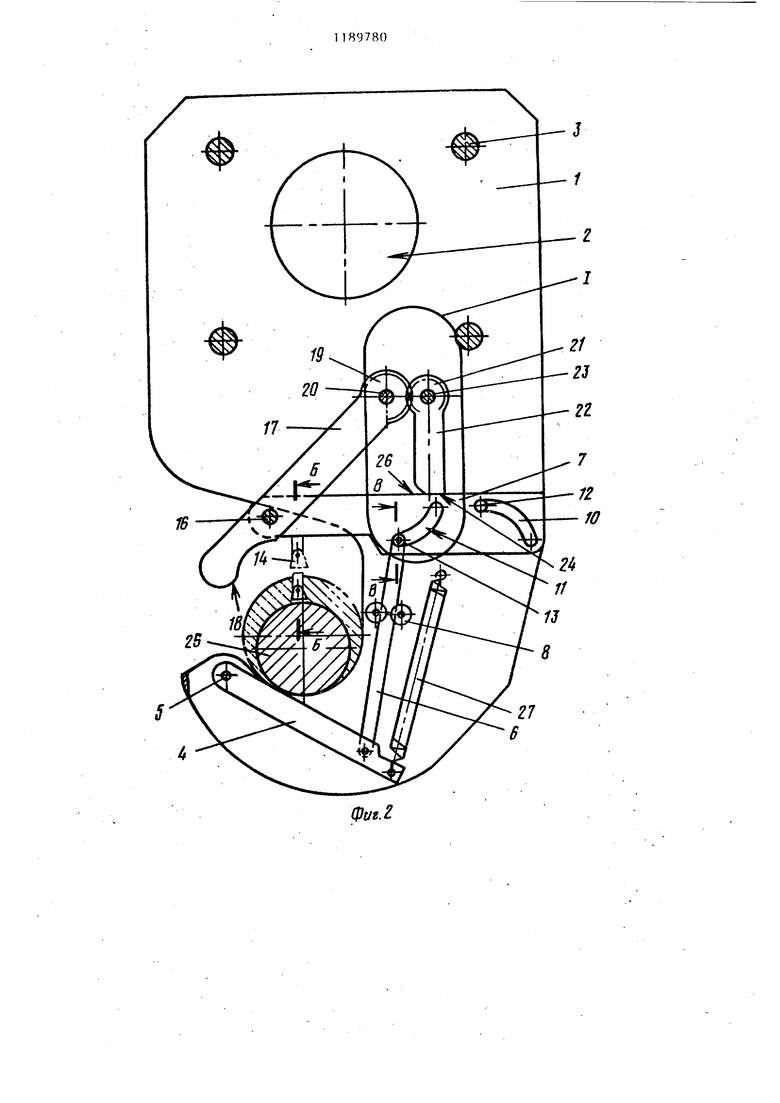
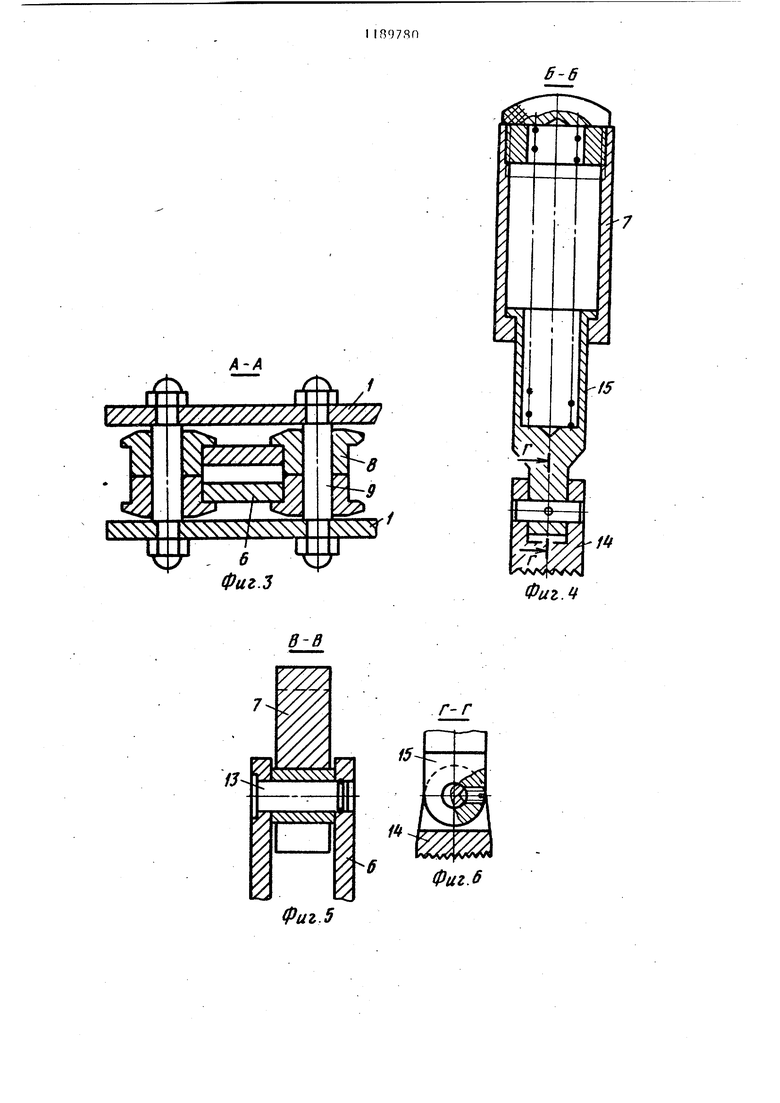
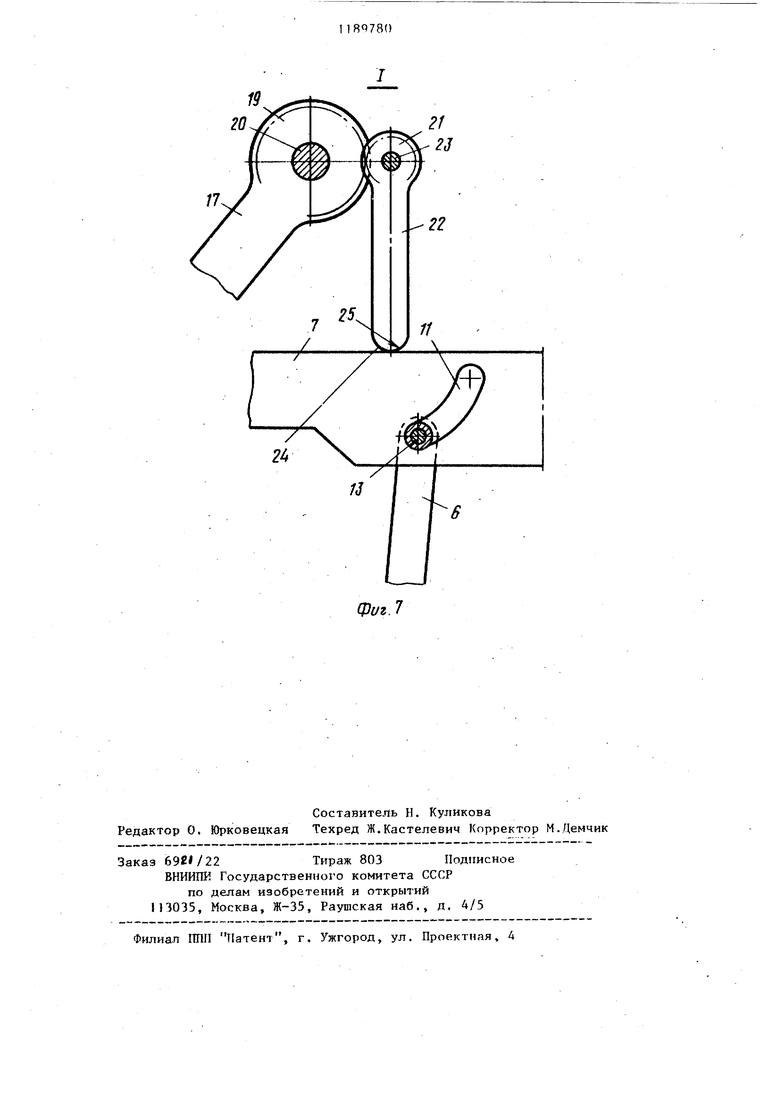
На фиг. 1 изображен крюковой захват в момент захвата груза крюком, общий вид; на фиг. 2 - то же, при-, подъеме и транспортировке груза крюком; на фиг, 3 - сечение А-А на фиг. фиг. ; на фиг. 4 - сечение Б-Б на фиг.2; на фиг. 5 - сечение на фиг. 2; на .фиг. 6 - сечение Г-Г на фиг. 4; на фиг. 7 - узел 1 иафиг. 2.
Крюковой захват содержит крюк 1 с установочными отверстиями 2 для установки на грузоподъемный механизм например раму или руку манипулятора, соединенный с рамой манипулятора крепежам 3, сбрасывающий рычаг 4, шарнирно установленный на оси 5 и соединенный с помощью тяги 6 с управляемым рычагом 7. На крюке 1 в . средней части тяги 6 установлены ролики 8 на осях 9, ограничивающие ее поперечные перемещения. Управляемый рычаг 7 имеет на одном плече два криволинейных паза 10 и 1, в одном из которых расположена управляющая ось 12, а в другом - ось 13 тяги 6, кроме того, он имеет на другом плече прижимной башмак 14, установленный на подпружиненном штоке 15, а со стороны зева крюка соединен осью 16 с управляющим рычагом 17, которьй, в свою очередь, на плече со стороны зева крюка имеет выемку 18, а на другом плече - зубчатый сектор 19,, установленный на . . оси 20 и -взаимодействующий с зубчатым сектором 21 запирающего рычага 22, установленным на оси 23. Оси 12, 20 и 23 закреплены на крюке I. Запирающий рычаг 22 имеет поверхность 24, выполненную по кривой.
Крюковой захват может быть установлен на. руке или раме манипулятора (для длинномеров, как правило, используется одновременно два подобных крюковых захвата) и работает следующим образом.
При горизонтальном перемещении крюка в его открытый зеп заводится цилиндрический груз 25 (или цилиндрические захватные органы груза), 5 установленный в строго определенном месте, при зтом сам манипулятор движется по заранее заданной программе, в результате чего при достижении грузом центра крюка происходит
его подъем. При попадании груза 25 на сбрасываюп1ий рычаг 4 тяга 6 тянет управляемый рычаг 7, который, в свою очередь, скользя пазом 10 по управляющей оси 12 ивзаимодей5 ствуя с управляющим рычагом 17, перекрывает зев крюка, а прижимной башмак 14 прижимает груз 25 к зеву крюка, при этом ось башмака 14 и подпружиненный шток 15 смещены относительно оси захваченного груза
25в сторону зева крюка. Одновременно зубча.тый сектор 19 управляющего рычага 17 поворачивает зубчатый сектор 21 запирающего рычага 22
5 вокруг его оси 23 таким образом, что его поверхность 24 взаимодействует с наружной поверхностью 26 управляемого рычага7, запирая его. Далее с грузом производят различные перемещения (горизонтальные, вертикальные) согласно технологическому, процессу и заданной программе . При неожиданном перемещении груза 25 вверх (при опускании, на5 пример, и встрече препятствий, не предусмотренных по техпроцессу) происходит его смещение в сторону . тела крюка, при этом груз 25 давит на управляемьй рычаг 7, а он, в
0 свою очередь, наружной поверхностью
26- на поверхность 24 запирающего рычага 22, препятствуя его повороту, а так как башмак 14 с подпружиненным штоком смещены в сторону
5 зева крюка, то груз 25 удерживается в зеве крюка, не соприкасаясь с выемкой 18 управляющего рычага 17 и, следовательно, крюк остается закрытым, и груз 25 не может соскочить с
0 крюка.
После доставки груза 25 на место
(заданное программой манипулятора) крюк-захват медленно опускается, одновременно смещаясь по горизонтали 5 таким образом, что груз 25 проходит в зеве крюка по косой, при зтом он нажимает на выемку 18 управляющего рычага 7. Управляющий рычаг 17,
- 3I
поворачиваясь вокруг своей оси 20, поворачивает вокруг оси 23 запирающий рычаг 22 благодаря взаимодействию зубчатых секторов J9 и 21 и вьшодит поверхность 24 из контакта с наружной поверхностью 26, кроме того, взаимодействуя с помощью оси 16-с управляемым рычагом, перемещает последний вперед и вверх, освобождая груз 25. Возврату всего устройства в исходное положение помогает пружина 27, взаимодействующая со сбрасывающим рычагом 4 и крю ком I.
897804
Передаточное отношение зубчатых секторов 19 и 21, а также положение запирающего рычага 22 по отношению к тяге 6 и расположение криволинейных 5 пазов 10 и 11 управляемого рычага 7 обеспечивает надежную работу устройства по захвату,подъему и транспортировке грузив манипулятором по заданной программе в автоматическом режиме без to предварительной подналадкипри смене диаметров захватываемого груза ине позволяет раскрыться запирающему устройству приперемещении груза и случайных встречных иливертикальных ударах.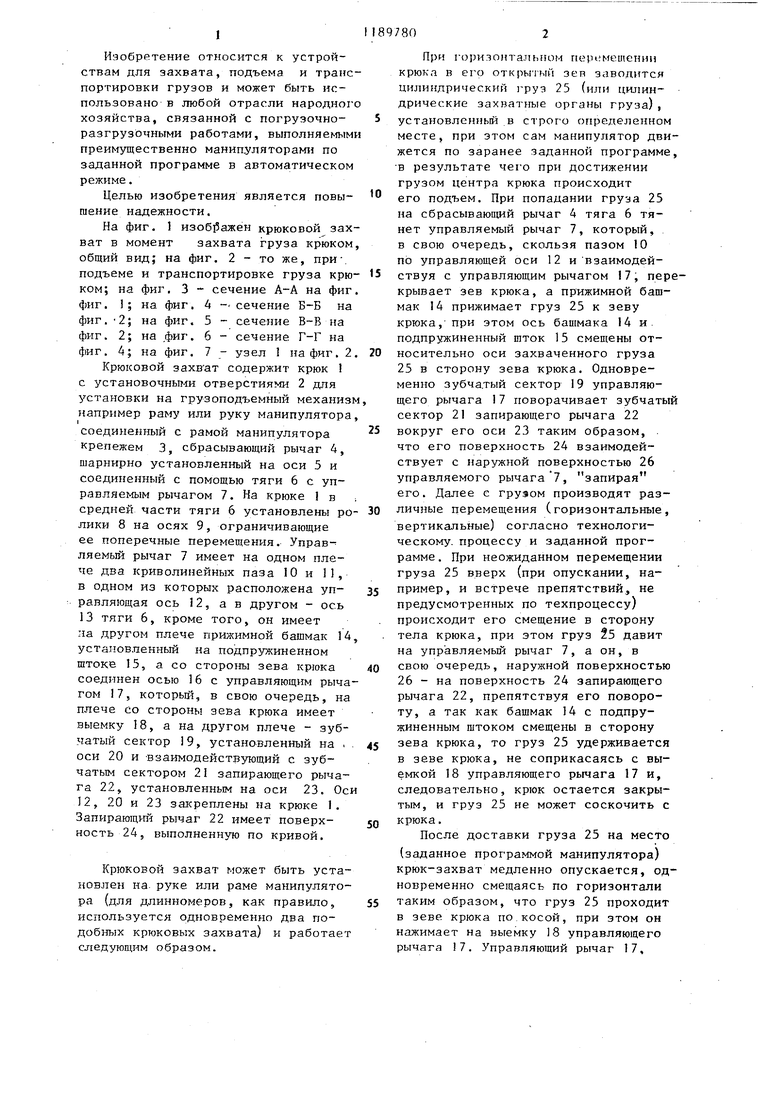
| название | год | авторы | номер документа |
|---|---|---|---|
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ ЗАХВАТНОГО УСТРОЙСТВА | 1993 |
|
RU2035292C1 |
| Грузозахватная траверса | 1984 |
|
SU1235812A1 |
| ГРУЗОВОЕ УСТРОЙСТВО | 1996 |
|
RU2142903C1 |
| ЗАХВАТНО-РАЗДЕЛИТЕЛЬНОЕ УСТРОЙСТВО | 1982 |
|
SU1095547A1 |
| Привод откидного борта самосвального кузова | 1983 |
|
SU1139654A1 |
| Грузовой крюк | 1986 |
|
SU1388378A1 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА И ПОДДЕРЖКИ ТРУБОПРОВОДА В ТРАНШЕЕ, ВЗАИМОДЕЙСТВУЮЩЕЕ С ТРУБОУКЛАДЧИКОМ | 1999 |
|
RU2175090C2 |
| Грузозахватное устройство для вертикального расположенных грузов | 1983 |
|
SU1184791A1 |
| Захватное устройство для грузов с цапфами | 1985 |
|
SU1316972A1 |
| ЗАХВАТ ДЛЯ ПОДЪЕМА И ТРАНСПОРТИРОВАНИЯЛИСТОВОГО ли | 1972 |
|
SU347281A1 |
КРЮКОВОЙ ЗАХВАТ преимущественно для манипуляторов, содержащий соединяемый с грузоподъемным механизмом крюк и сбрасывающий подпружиненный рычаг, отличающий с я тем, что, с целью повьшения надежности, он снабжен размещенными на теле крюка роликами, расположенной между ними тягой, соединенной одним концом со сбрасывающим рычагом, управляемым рычагом с криволинейными пазами на одном плече, в одном из которых расположен другой конец тяги, расположенной в другом пазу управляемого рычага осью, соединенным с вторым плечом управляемого рычага подпружиненным башмаком, соединенным с управляемым рычагом управляющим рычагом, выполненным с выемкой на поверхности со стороны зева крюка на одном плече и с зубчатым сектором на другом, и запирающим рычагом с зубчатым сектором на одном плече, закрепленным на теле крюка посредством оси i с возможностью зацепления с сектором .управляющего рычага, и криволиней(Л ной поверхностью на другом плече для взаимодействия с управляемым рычагом.
vb
гт
8
Фаг.г
f(-f(
Фиг.5
Фиг.6
Фиг.7
| ЗАХВАТА ЦИЛИНДРИЧЕСКИХ ГРУЗОВ | 0 |
|
SU243170A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
