Изобретение относится к грузозахватным устройствам.
Цель изобретения - упрощение конструкции и снижение ее массы и габаритов.
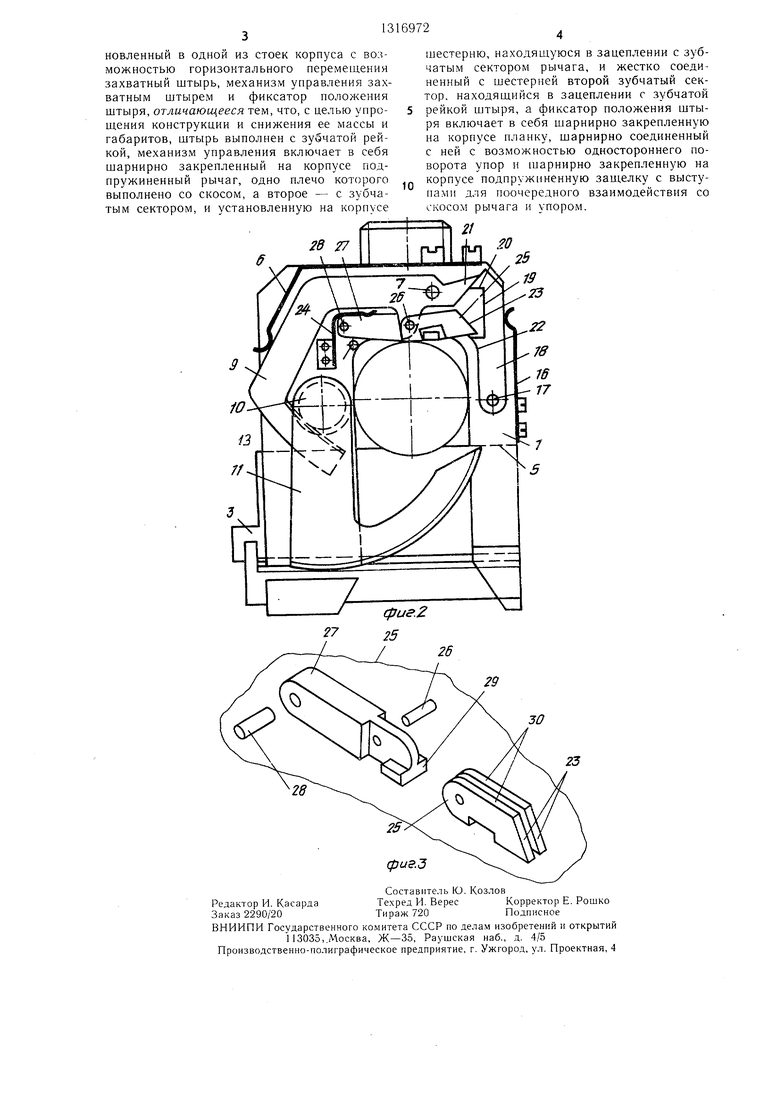
На фиг. 1 показано устройство в исходном положении; на фиг. 2 - то же, в рабочем положении; на фиг. 3 - выполнение планки с упором.
Захватное устройство содержит корпус 1 с пазом 2 и захватный орган, выполненный в виде грузонесущего штыря 3 с несущей выемкой 4, который установлен с возможностью перемещения в направляющих 5 корпуса 1. Захватное устройство содержит также механизм управления захватным HJTbi- pe.vi и фиксатор его положения. Механизм управления включает подпружннепный пружиной 6, щарнирно установленный на оси 7 двуплечий рычаг 8, длинное плечо которого выполнено в виде зубчатого сектора 9, связанного посредством жестко скрепленных между собой щестерни 10 и второго зубчатого сектора 11 с рейкой 12. Шестерня 10 и зубчатый сектор 11 щарнирно закреплены на оси 13 корпуса 1, а рычаг 8 снабжен выступом 14. Рейка 12 установлена с возможностью перемещения в направляющих 15 (фиг. 3) корпуса 1 и жестко закреплена на грузонесущем щтыре 3.
Фиксатор положения захватного органа содержит подпружиненную пружиной 16. шарнирно установленную на оси 17 защелку 18 с выполненными на ней пазом 19 и выступом 20, взаимодействующими со скосом 2 короткого плеча рычага 8. На защелке 18 выполнен выступ 22, взаимодействующий с концом 23 подпружиненного пружиной 24 упора 25, который щарнирно закреплен посредством оси 26 с возможностью одностороннего поворота на планке 27. Планка 27 закреплена на корпусе 1 посредством оси 28 и выполнена Т-образной (фиг. 3) с уступом 29. Упор 25 выполнен из двух параллельных щек 30. Для ограничения поворота вниз планки 27 на корпусе 1 закреплен упор 31. Для соединения захватного устройства с грузоподъемным механизмом на корпусе 1 закреплен соединительный элемент.
Устройство работает следующим образом.
В исходном положении грузонесущий щтырь 3 вместе с рейкой 12 находится в крайнем левом положении (показано щтрих- пунктирной линией). Зубчатые секторы 9 и 11, а также рычаг 8 вместе с выступом 4 находятся в крайнем верхнем положении. Ское 21 рычага 8 заперт выступом 20 рычага 18. При этом усилие пружины 16 больше усилия пружины 6. Расцепления скоса 21 и выступа 20 не происходит. Планка 27 под действием пружины 24 опущена в крайнее нижнее положение. Упор 25 находится ниже выступа 22 рычага 18. Паз 2 корпуса 1 открыт. При захвате груза корпус 1 опус5
кают на цапфу груза, которая при входе в паз 2 нажимает на упор 25.
Поворачиваясь вокруг оси 28, упор 25 взаимодействует с выступом 22 рычага 18 и,
преодолевая действие пружины 16, отжимает рычаг 18, расцепляя его со скосом 21 рычага 8 (фиг. 2). После расцепления скоса 21 и выступа 20 рычаг 8 под действием пружины 6 поворачивается вокруг оси 7 и посредством
зубчатого сектора 9 .вращает шестерню 10, а вместе с ней и зубчатый сектор 11, который, в свою очередь, перемещает рейку 12 по направляющим 15 корпуса 1. Рейка 12, жестко скрепленная со штырем 3, перемещает последний по направляющим 5 корпуса 1. Одновременно конец 23 упора 25 проходит выступ 22 рычага 18 и устанавливается в пазу 19. Рычаги 8 и 18 под действием пружин 6 и 16 занимают исходное положение (фиг. 2), Рейка 12 устанавливает штырь 3 в конечное положение. Цапфа устанавли0 вается в выемке щтьфя 3. Далее идет перемещение груза захватным устройством до заданной позиции.
Для расцеплении устройства с грузом корпус 1 перемещают вниз. Цапфа груза нажимает одновременно на выступ 14 рычага 8 и на упор 25. При этом рычаг 8 поворачивается вокруг оси 7 по часовой стрелке, преодолевая сопротивление пружины 6. Зубчатый сектор 9 рычага 8 вращает шестерню 10 и вместе с ней зубчатый сектор
Q 11 по часовой стре.лке и перемещает рейку 12 в крайнее левое положение. Вместе с рейкой 12 выводится из паза 2 грузонесущий щтырь 3. При этом кине.матическая цепь отвода штыря 3 не испытывает никакой силовой нагрузки, так как цапфа выш ла из выемки штыря 3 и контактирует только с выступом 14 рычага 8 и упоро.м 25. В момент вывода штыря 3 из паза 2 скос 21 скользит по выступу 20 рычага 18 и отжимается. Упор 25 с планкой 27 под действием цапфы вращается вокруг оси 28, преодоле0 вая действие пружины 24, но не выходит за пределы паза 19.
При установке грузонесущего штыря 3 в крайнем левом положении скос 21 полностью входит в паз 19. Рычаг 18 под действием пружины 16 запирает скос 21. При пере мещении корпуса 1 вверх он выводится из зацепления с цапфой. При этом планка 27 под действием пружины 24 поворачивается вокруг оси 28 по часовой стре.;1ке. Упор 25 свободно проходит мимо выступа 22 и опускается в исходное положение.
Предлагаемое изобретение обеспечивает упрощение конструкции путем исключения из нее силового привода, а также уменьщения габаритов и массы устройства.
5Формула изобретения
Захватное устройство для грузов с цапфами, содержащее П-образный корпус, уста0
новленныи в одной из стоек корпуса с возможностью горизонтального перемещения захватный штырь, механизм управления захватным штырем и фиксатор положения штыря, отличающееся тем, что, с целью упро- ш.ения конструкции и снижения ее массы и габаритов, штырь выполнен с зубчатой рейкой, механизм управления включает в себя шарнирно закрепленный на корпусе подшестерню, находящуюся в зацеплении с зубчатым сектором рычага, и жестко соединенный с шестерней второй зубчатый сектор, находящийся в зацеплении с зубчатой рейкой штыря, а фиксатор положения штыря включает в себя шарнирно закрепленную на корпусе планку, шарнирно соединенный с ней с возможностью одностороннего поворота упор н шарнирно закрепленную на
пружиненный рычаг, одно плечо которого . корпусе подпруж 1ненную защелку с высту10
выполнено со скосом, а второе - с зуоча- тым сектором, и установленную на корпусе
шестерню, находящуюся в зацеплении с зубчатым сектором рычага, и жестко соединенный с шестерней второй зубчатый сектор, находящийся в зацеплении с зубчатой рейкой штыря, а фиксатор положения штыря включает в себя шарнирно закрепленную на корпусе планку, шарнирно соединенный с ней с возможностью одностороннего поворота упор н шарнирно закрепленную на
корпусе подпруж 1ненную защелку с высту. корпусе подпруж 1ненную защелку с высту10
памп для поочередного взаимодействия со скосом рычага и упором.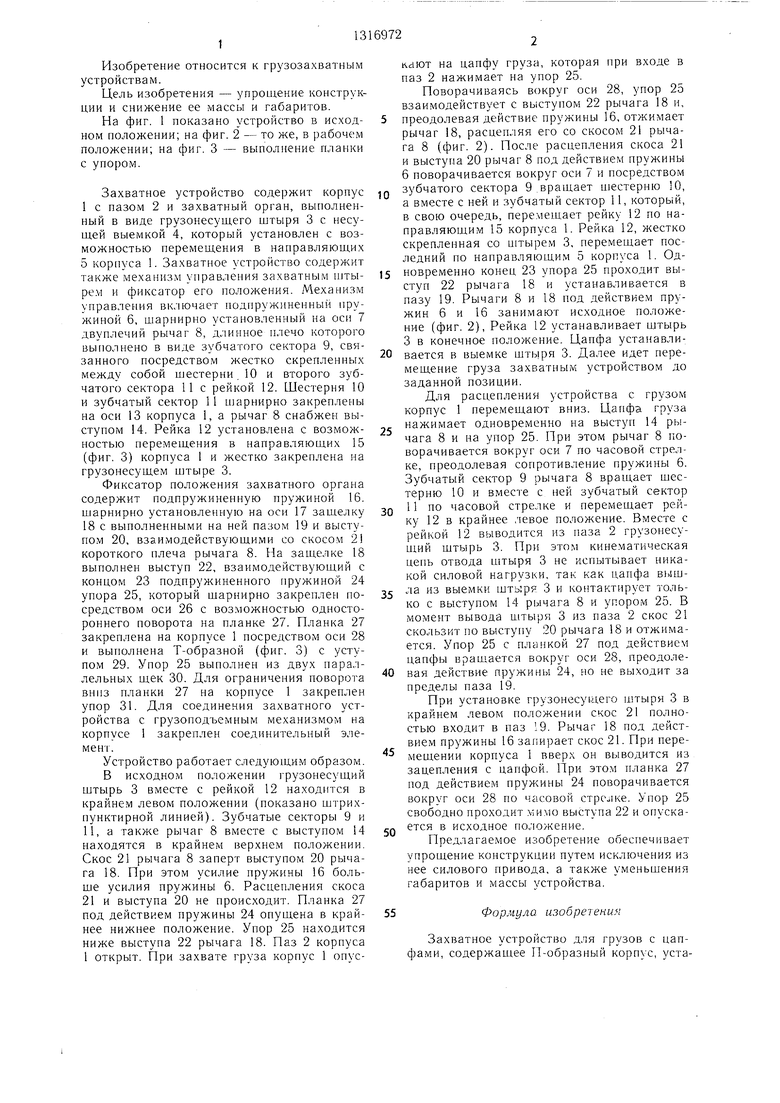
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватная балка для маневрирования гидротехническими затворами с выдвижными штангами | 1978 |
|
SU732440A1 |
| Захватное устройство | 1981 |
|
SU1008138A1 |
| Грузозахватное устройство | 1989 |
|
SU1657466A1 |
| Устройство Кривовязюка для отделения листов от стопы и подачи их в рабочую зону пресса | 1979 |
|
SU871927A2 |
| Устройство кривовязюка для отделениялиСТОВ OT СТОпы и пОдАчи иХ B РАбОчуюзОНу пРЕССА | 1978 |
|
SU799872A1 |
| Стенд для сборки и обжатия уплотнительных муфт с воздуховодными трубками | 1982 |
|
SU1050846A1 |
| Устройство для отделения листа от стопы и подачи его в рабочую зону пресса | 1980 |
|
SU867481A1 |
| Устройство для вырубки заготовок из плоского материала | 1983 |
|
SU1119757A1 |
| Захватное устройство для грузов с цапфами | 1987 |
|
SU1481190A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОЙ ПЕРЕДАЧИ ИНСТРУМЕНТА | 1973 |
|
SU375156A1 |
Изобретение относится к грузозахватным устройствам и может быть использовано в портальных манипуляторах и других захватных устройствах. Целью изобретения является упрощение конструкции. Устройство состоит из корпуса 1 с пазом 2 для входа и выхода цапфы и захватного органа, выполненного в виде перемещающегося по направляющим 5 корпуса 1 грузонесущего щтыря 3 с несущей выемкой 4. Механизм управления вводом и выводом щтыря 3 в паз 2 выполнен в виде двуплечего рычага 8, одно плечо которого кинематически связано с рейкой 12, жестко скрепленной со щтырем 3. Второе плечо 21 рычага 8 и размещенный под ним ломающийся вверх рычаг попеременно взаимодействуют с фиксатором 18, который осуществ. 1яет фиксацию штыря 3 в его конечных ноложениях. При зацеплении груза цапфа, входя в паз 2, нажимает на рычаг 27, который отжимает фиксатор 18 и освобождает рычаг 8. Последний под действием пружины 6 запирает цапфу груза штырем 3, фиксация которого осуществляется взаимодействием рычага 27 с пазом 19 фиксатора 18. При расцеплении груза корпус опускается на цапфу выступом 14 рычага 8, который, преодолевая действие пружины 6, выводит штырь 3 из паза 2, освобождая груз. При этом фиксатор 18, взаимодействуя со скосом 21 рычага 8, удерживает щтырь 3 в конечном положении. 3 ил. СО М № 21 со о: со to (раеЛ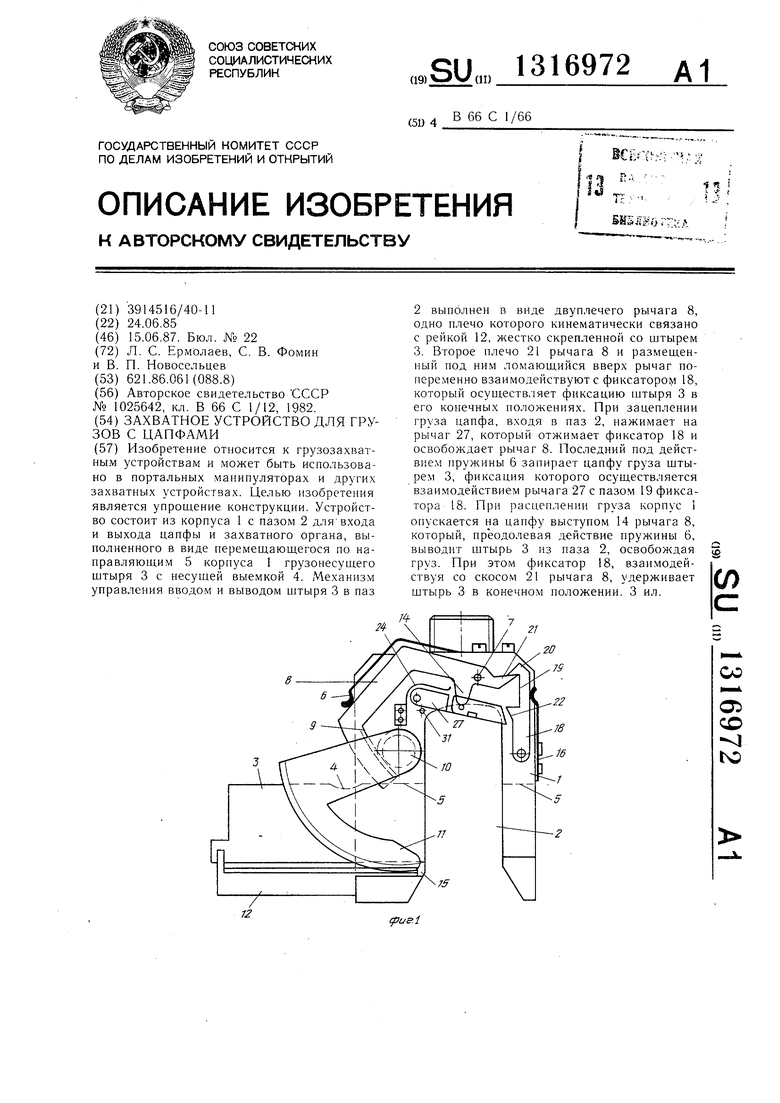
фие.г
725
Составитель Ю. Козлов Редактор И. КасардаТехред И. ВересКорректор Е, Рошко
Заказ 2290/20Тираж 720Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений п открытий
113035,.(Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
26
29
30
23
фиг.З
| Штыревое строповое устройство | 1982 |
|
SU1025642A2 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
