Изобретение относится ,к иодъемно-транснортному 1машиностроению, в частности для подъема и транспортирования листового материала в вертикальном положении.
Известны захваты для подъема и транспортирования листового материала в вертикальном положении, содержащие корпус, выполненный в виде скобы, снабженной подвиячным клиновидным упором, перемещающимся по наклонным нанравляющим, и зажимиой двуплечий кулачок, вращающийсяна неподвижной оси, одно плечо которого, взаимодействующее с листовым материалом, имеет криволинейный профиль, а второе при помощи рычага связано с подвесной серьгой.
Цель изобретения - повыщение надежности зажатия листового материала различной толщины и предотвращение заклинивания зажимного кулачка.
Это достигается тем, что подвижный клиновидный yinop через сиСтему тяг связан с подвесной серьгой и выполнен с зубчатой рейкой, взаимодействующей с подпружиненным зубчатым сектором для предварительного поджатия листового материала в зеве скобы.
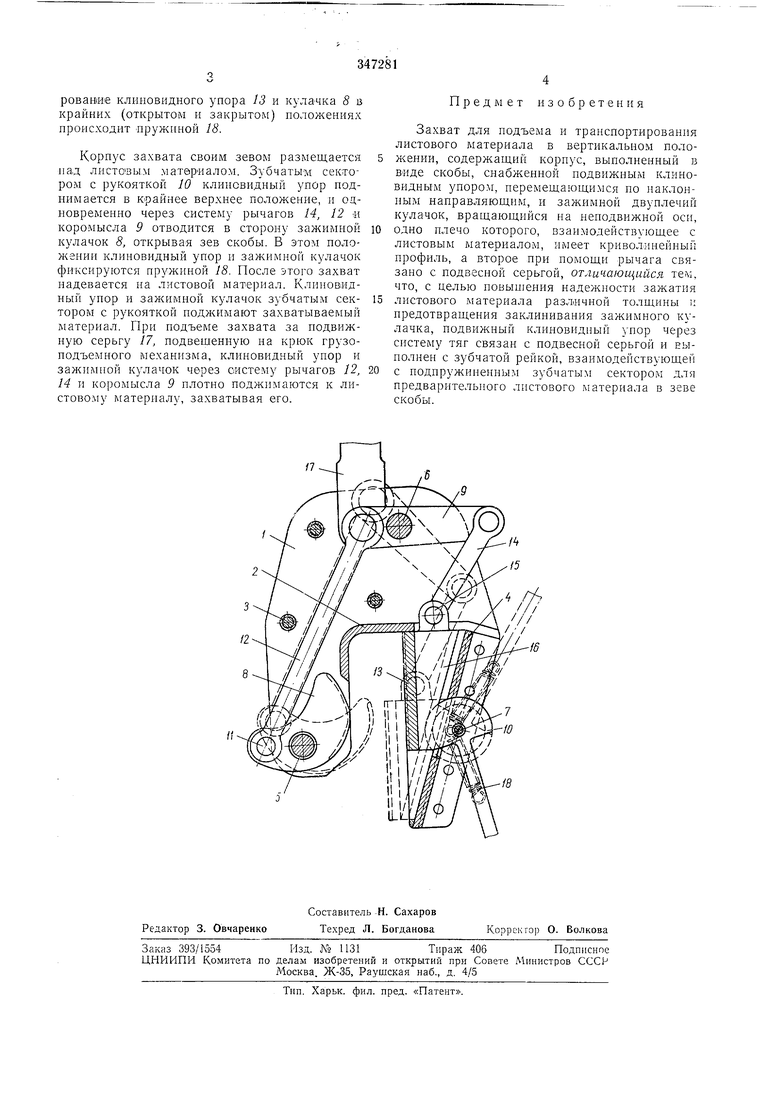
На чертеже изображен предлагае.мый захват, вид сбоку.
груз. Щеки / соединены между собой ребрами 2 и стяжными болтами с втулками 3. Кроме того, захват имеет наклонные направляющие 4 ocii5,6,7,}a которых вращаются соответственно двуплечий зажлмной кулачок 8, коромысло 9 и зубчатый сектор с рукояткой W устройства предварительного прижима и отвода зажимного кулачка.
Двуплечий зажимной кулачок 8 одним плечом взаимодействует с транспортируемым листом. Его контактная поверхность выполнена по криволинейному профилю с насечкой или без насечки. Кулачок 8 вращается на оси 5,
жестко закреплеиной в щеках / захвата. Второе плечо кулачка 8 при пальца 11 связано с рычагом 12.
Подвижный клиновидный уиор 13 иеремещается по наклонным направляющим ири помощи рычага 14, соединенного с последним щарниром 15, за счет поворота зубчатого сектора с рукояткой 10, который входит в зацепление с зубчатой рейкой 16, укрепленной с тыльной стороны упора. Система рычагов J2, 14 и коромысла 9 связывает все узлы захвата с подвесной серьгой 17.
рование клиновидного упора 13 и кулачка 8 в крайних (открытом и закрытом) ноложениях происходит иружпной 18.
Корпус захвата своим зевом размещается над листовым материалом. Зубчаты-м сектором с рукояткой 10 клиновидный упор поднимается в крайнее верхнее положение, и одновременно через систему рычагов 14, 12 « коромысла 9 отводится в сторону зажимной кулачок 8, открывая зев скобы. В этом положении клиновидный упор и зажимной кулачок фиксируются пружиной 18. После этого захват надевается на листовой материал. Клиновидный упор и зажимной кулачок зубчатым сектором с рукояткой поджимают захватываемый материал. При подъеме захвата за подвижную серьгу /7, подвешенную на крюк грузоподъемного механизма, клиновидный уиор и зал :импой кулачок через систему рычагов 12, 14 и коромысла 9 плотно поджимаются к листовому материалу, захватывая его.
Предмет изобретения
Захват для иодъема и транспортирования листового материала в вертикальном положении, содержащий кориус, выполненный в виде скобы, снабженной подвижным клиновидным упором, перемещающимся по наклонным направляющим, и зажимной двуплечий кулачок, вращающийся на неподвижной оси, одно плечо которого, взаимодействующее с листовым материалом, имеет кривол инейный профиль, а второе при помощи рычага связано с подвесной серьгой, отличающийся тем, что, с целью повышения надежности зажатия листового материала различной толщины i; предотвращения заклинивания зажимного кулачка, подвижный клиновидный унор через систему тяг связан с подвесной серьгой и выполнен с зубчатой рейкой, взаимодействующей с иодиружииениым зубчатым сектором для предварительного листового материала в зеве скобы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство для листовых изделий | 1979 |
|
SU854863A1 |
| Грузозахватное устройство | 1990 |
|
SU1754622A1 |
| Устройство для подвязки растений к шпалерной проволоке | 1987 |
|
SU1588327A1 |
| Устройство для мерной резки провода | 1981 |
|
SU1134266A1 |
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ ДЛИНЫ СТЕЖКА | 2002 |
|
RU2202016C1 |
| Манипулятор | 1991 |
|
SU1813620A1 |
| БОЕВОЙ МЕХАНИЗМ БЕСЧЕЛНОЧНОГО ТКАЦКОГО СТАНКА С ЗАЖИМНЫМИ ЧЕЛНОКАМИ | 1990 |
|
RU2071515C1 |
| Захватное устройство промышленного робота | 1985 |
|
SU1313697A1 |
| Автоматическая линия для изготовления тканых коммутационных плат | 1979 |
|
SU912031A1 |
| Многопозиционный сверлильный автомат | 1978 |
|
SU774819A1 |
/7
/2
/6
