Изобретение относится к грузозахватным устройствам для подъема и транспортирования длинномерных грузов преимущественно при химической обработке деталей в полуавтоматическом и автоматическом режимах.
Цель изобретения - повышение надежности.
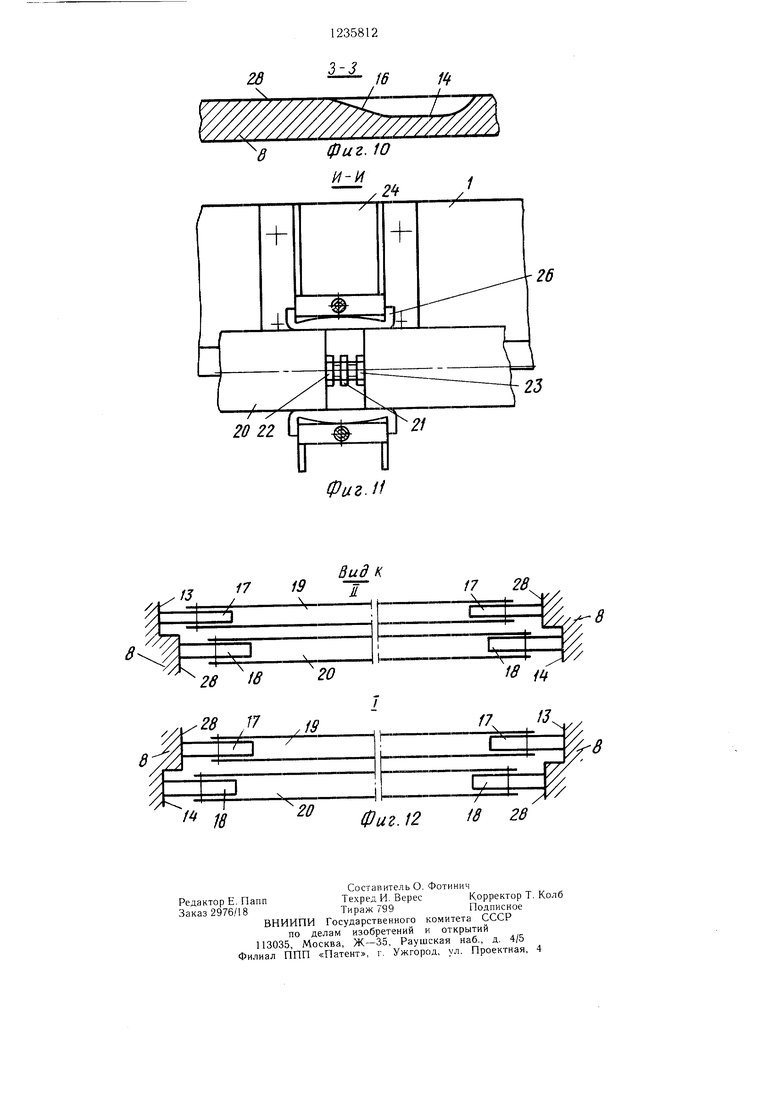
На фиг. 1 изображена траверса, общий вид; на фиг. 2 - вид А на фиг. 1 в момент захвата груза; на фиг. 3 - то же, в транспортировочном положении; на фиг. 4 - вид Б на фиг. 2 ; на фиг. 5 - сечение В-В на фиг. 4; на фиг. 6 - вид Г на фиг. 3; на фиг. 7- сечение Д-Д на фиг. 6; на фиг. 8 - сечение Е-Е на фиг. 1; на фиг. 9 - сечение Ж-Ж на фиг. 2; на фиг. 10 - сечение 3-3 на фиг. 2; на фиг. 11 - сечение И-И на фиг. 8; на фиг. 12 - вид К на фиг. 6 - схема положения управляемых тяг при захвате груза (положение 1) и при его транспортировке (положение II).
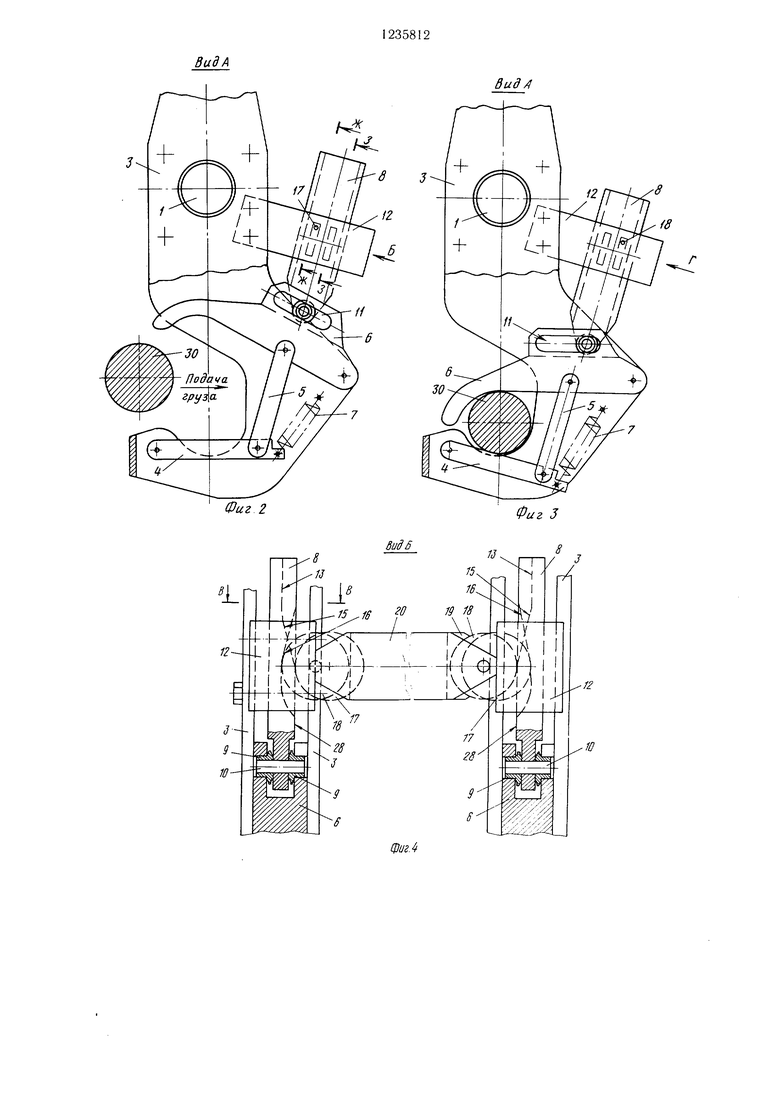
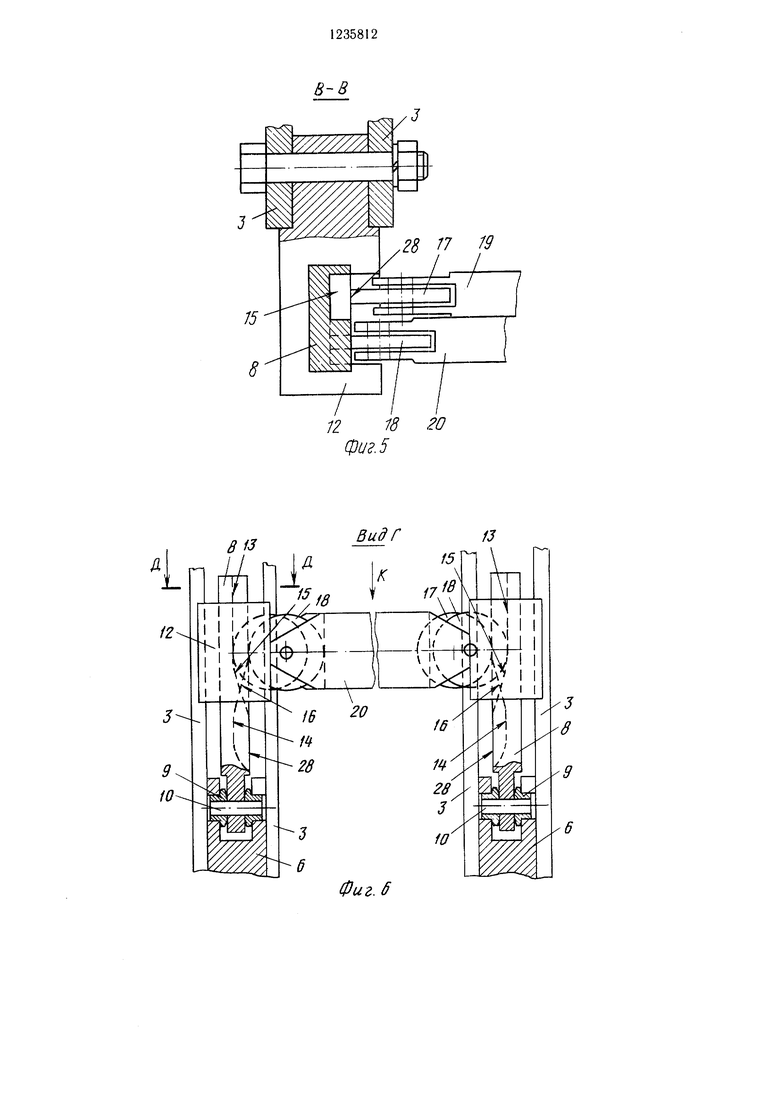
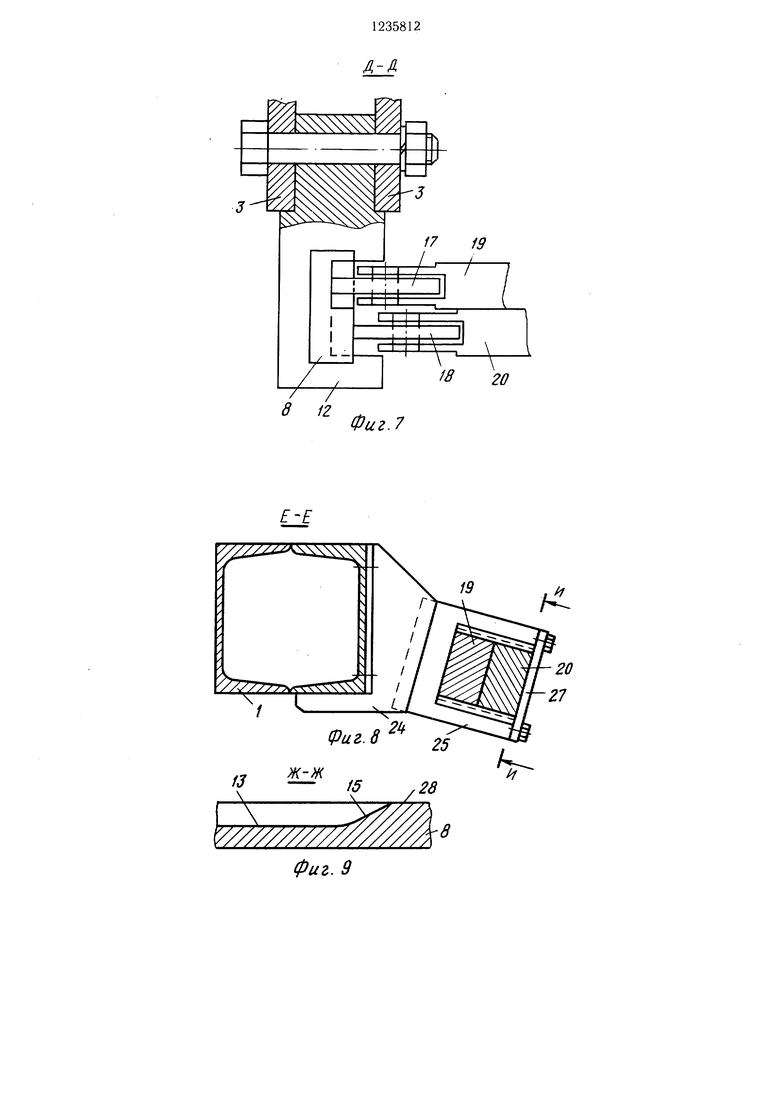
Грузозахватная траверса состоит из балки 1 и крюковых захватов 2, жестко с ней связанных. Крюковые захваты 2 состоят каждый из двух щек 3, расположенных на расстоянии друг от друга, определяемом размерами захватных органов грузоподъемных механизмов, между которыми щарнирно устанавливаются: сбрасывающий рычаг 4, соединенный тягой 5 с запирающим рычагом 6, а также возвратная пружина 7. Запирающий рычаг 6 связан с ползуном 8 с помощью роликов 9 и осей 10, установленных в его пазах П. Ползун 8 устанавливается в корпусе 12, закрепленном между щек 3 крюковых захватов 2, и имеет смещенные один относительно другого параллельные пазы 13 и 14 со скосами 15 и 16, направленные навстречу друг другу, по которым происходит перемещение роликов 17 и 18, установленных на тягах 19 и 20. Последние выполнены из двух частей, между которыми расположены звенья регулировки, состоящие из двустороннего винта 21 с правой и левой резьбами и двух контргаек 22 и 23. На балке 1 устанавливаются кронштейны 24 с держателями 25, имеющие вкладыши 26, в которые устанавливаются тяги 19 и 20, и удерживающие крышки 27. Длина тяг 19 и 20 регулируется таким образом, чтобы ролики 17 и 18 одновременно ка- сались бы двух ползунов 8, при этом один
о S
5
0
5
ИЗ роликов 17 тяги 19 попадает в паз 13 ползуна 8, а второй ролик 17 тяги 19 опирается на плоскость 28 другого ползуна 8. В тоже время ролик 18 тяги 20 опирается на плоскость 28 первого ползуна 8, а второй ролик 18 тяги 20 попадает в паз 14 другого ползуна 8 (фиг. 12, положения I).
Работа осуществляется следующим образом.
Грузозахватная траверса может работать от двух кранов или спаренных тельферов 29, расположенных на одной кранбалке в полуавтоматическом или автоматическом режимах по захвату груза с опор, различных манипуляций с ним в процессе химической обработки и установления груза на опоры
с определенной его ориентацией. Грузозахватная траверса заводится на держатель груза 30 при горизонтальном перемещении до центра крюковых захватов 2, после чего груз поднимается. Держатель груза 30, попадая на сбрасывающие рычаги 4, давит на них, заставляя их опускаться, а с помощью тяг 5 одновременно опускаются и запирающие рычаги б, которые зажимают держатели груза 30 в крюковых захватах 2. При движении вниз запирающие рычаги 6 через ролики 9 с осями 10, перемещающимися в пазах 11, тянут за собой ползуны 8. При этом происходит перемещение тяг 19 и 20 из положения I в положение II (фиг. 12). После доставки груза на место траверса опускается, причем держатель груза 30 нажимает на запирающие рычаги 6, которые толкают вверх ползуны 8 и в случае точной установки груза 30 на опоры 31 происходит одновременный возврат тяг 19 и 20 в исходное положение, а держатель груза 30 освобождается от траверсы.
В случае непопадания держателя груза 30 на одну из опор 31 (например, на правую) тяги 19 и 20 не могут перемещаться, блокируя раскрытие запирающего рычага 6, так как при вертикальном перемещении ползуна 8 (левого крюкового захвата 2) скос 15 давит на контактирующий с ним ролик 17 тяги 19, а второй ролик 17 этой же тяги упирается в плоскую поверхность 28 ползуна 8 (правого крюкового захвата 2), что и предотвращает досрочное освобождение траверсы от груза, предотвращая падение последнего.
3
Фиг 2
вид А
8
Фиг 3
ВиЗБ
| название | год | авторы | номер документа |
|---|---|---|---|
| Крюковой захват | 1983 |
|
SU1189780A1 |
| Автоматическое захватное устройство | 1971 |
|
SU549400A1 |
| ТРАВЕРСА | 2002 |
|
RU2225826C1 |
| ТРАВЕРСА РЫЧАЖНАЯ С РАЗДВИЖНЫМИ ЗАХВАТАМИ | 2015 |
|
RU2587185C1 |
| Грузозахватное устройство | 1989 |
|
SU1678747A1 |
| Захват-кантователь для цилиндрических грузов | 1981 |
|
SU1006357A1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |
| Клещевой захват | 1977 |
|
SU703467A1 |
| Грузозахватное устройство для монтажа строительных конструкций | 1974 |
|
SU557034A1 |
| Захват-раскладчик для штучных грузов | 1977 |
|
SU789369A1 |

/f
9 iO
Фиг. 5
В ид Г
А-А
W 20
Фиг.7
..
/ У
Фиг. 8 25
Ж-Ж
iS
/
28
X
У/////////7/У фиг. В
гв
LJ
i6
Щ
y///7Z
Фиг.1
Вид к ,,7,9 17 28.
| Автоматический захват | 1981 |
|
SU1009963A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
