Изобретение относится к устройствам автоматики и может быть использовано в цифровых системах автоматического управления,, в частности в цифровых следящих системах.
Целью изобретения является повышение точности работы цифровых систем управления.
На фиг. 1 представлена структурная схема устройства.
Схема содержит первый 1 и второй 2 фильтры, блок 3 выделения модуля, триггер 4, множительное звено 5, преобразователь 6 кода, экстраполятор 7, элемент ИЛИ 8, задатчик 9 входного сигнала, на фиг. 2 представлен вариант технической реализации второго 2 фильтра, где регистр 10 памяти, первый сумматор 11, второй сумматор 12, элемент 13 усиления, элемент разности сигнала х(п) 14.
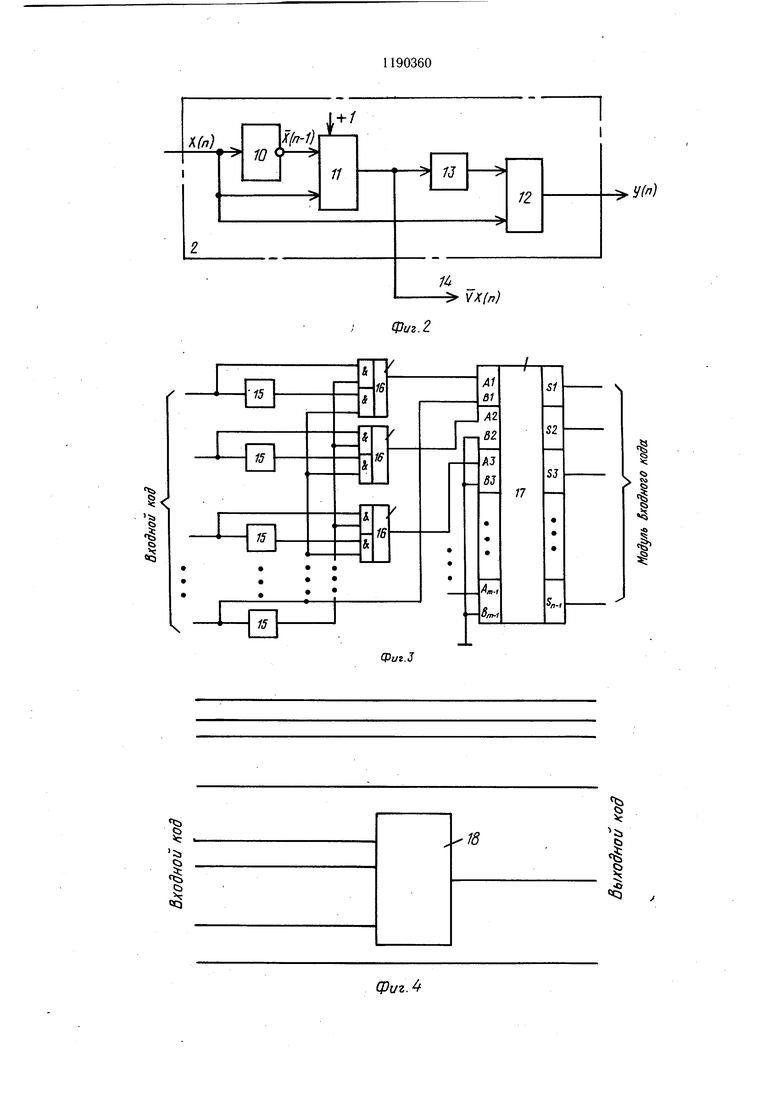
На фиг. 3 показана структурная схема варианта технической реализации блока 3 выделения модуля сигнала xi, которая содержит элементы ИЛИ 15, элементы 2И-ИЛИ 16, сумматор 17.
На фиг. 4 показана техническая реализация преобразователя 6 кода, содержащая элемент ИЛИ 18.
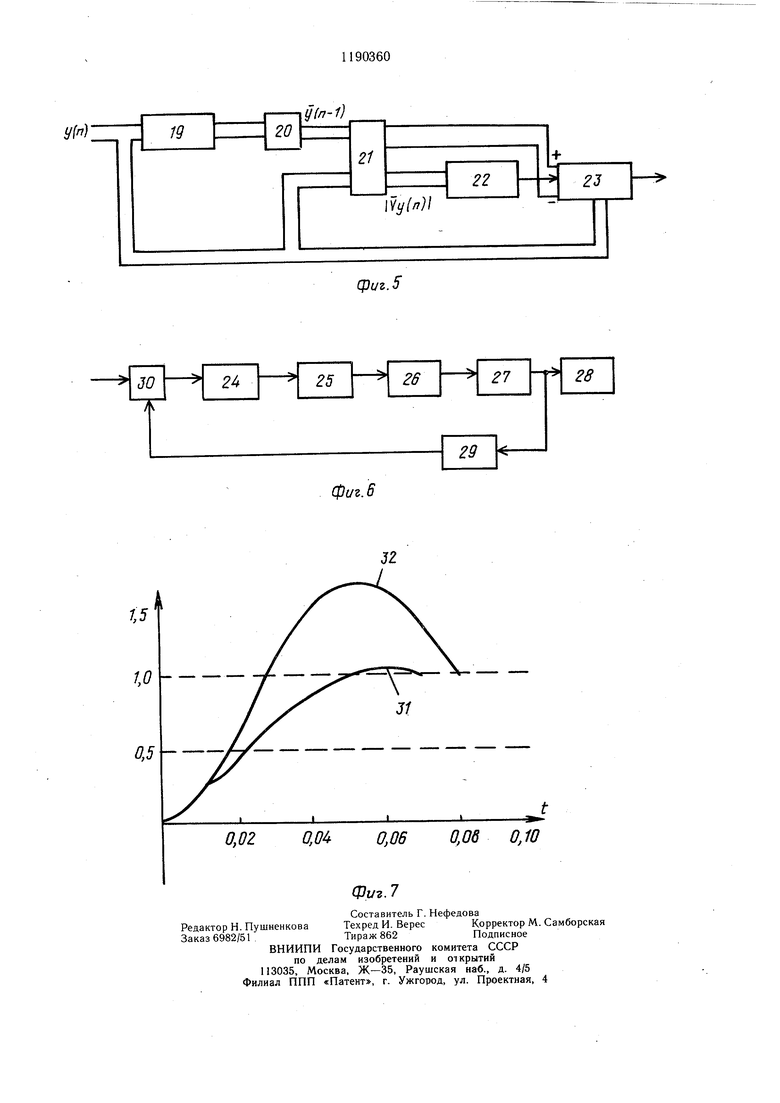
На фиг. 5 - структурная схема экстраполятора 7, содержащая регистр 19 памяти, элемент 20 И, сумматор 21, преобразователь 22 код-частота, реверсивный счетчик 23.
На фиг. 6 приведен пример включения псевдолинейного корректирующего устройства 24 в цифровую следящую систему, где преобразователь 25 код -напряжение, усилитель 26 мощности, исполнительный двигатель 27,, объект 28 управления, преобразователь 29 вал-код, сумматор 30.
На фиг. 7 показаны переходные процессы по координате ввь1х(/) в случае применения предлагаемого устройства 31 и в случае применения известного устройства 32.
Устройство работает следующим обра1зом.
Цифровой сигнал х(п) с выхода задатчика 1 входного сигнала, который в системе автоматического управления обычно является ошибкой системы, поступает на входы первого 1 и второго 2 фильтров, определенным образом изменяющих этот сигнал по амплитуде и по фазе, причем обычно выходной сигнал первого 1 фильтра отстает, а выходной сигнал второго фильтра 2 опережает по фазе входной сигнал х(п). Выходной сигнал второго фильтра 2 с помощью преобразователя 6 кода преобразуется в
сигнал меньшей -разрядности и поступает на вход экстраполятора 7, который формирует на своем выходе сигнал, изменяющийся в течение интервала дискретности по линейному закону, обеспечивая тем самым более точную работу триггера 4. Выходной сигнал первого фильтра 1 поступает через блок 3 выделения модуля на вход множительного устройства 5, осуществляющего умножение модуля выходного сигнала первого фильтра 1 на знак экстраполированного сигнала у с выхода экстраполятора 7. Второй фильтр 2, имеющий положительную фазовую характеристику, имеет передаточную функцию вида D (Z) 1 -ЬоС (1 т. е. имеется второй выход, с которого поступает сигнал первой разности от входного сигнала устройства vx(n) х(п)-х(п-1), которьт поступает на вход элемента ИЛИ 8. Если , то выходной сигнал элемента ИЛИ 8 запрещает запись знакового разряда
Q сигнала у на триггере 4, оставляя в нем предыдущее состояние, и тем самым препятствуя нежелательному изменению знака, вызванному эффектом квантования по уровню. Таким образом, введение в цифровое псевдолинейное корректирующее устройство
5 экстраполятора 7 преобразователя 6 кода и элемента 8 ИЛИ позволяет скомпенсировать вредный эффект квантования входного сигнала по времени и по уровню и обеспечить тем самым улучшение качественных показателей цифровой системы.
0 Рассмотрим переходные процессы в цифровой следящей системе, функциональная схема которой приведена на фиг. 6.
В режиме отработки ступенчатых сигналов ввх (t)a(t) знак сигнала на выходе второго фильтра 2 ПЛКУ 24 вначале совпадает со знаком ошибки х((}, что способствует быстрой отработке рассогласования. Но в определенный момент, определяемый видом передаточной функции второго фильтра 2,знак управляющего сигнала на выходе
0 ПЛКУ 24 изменяется, что обеспечивает эффективное торможение системы и, следовательно, малое значение величины максимального перерегулирования и времени переходного процесса. Однако в системе с известным ПЛКУ 24 работа устройства существенно зависит от эффекта квантования сигналов по времени и по уровню. Наличие квантования может привести к запаздыванию момента начала, торможения и чрезмерно большим значениям величины перерегулирования и времени переходного процесса (фиг. 7 кривая 2).
«5
|
f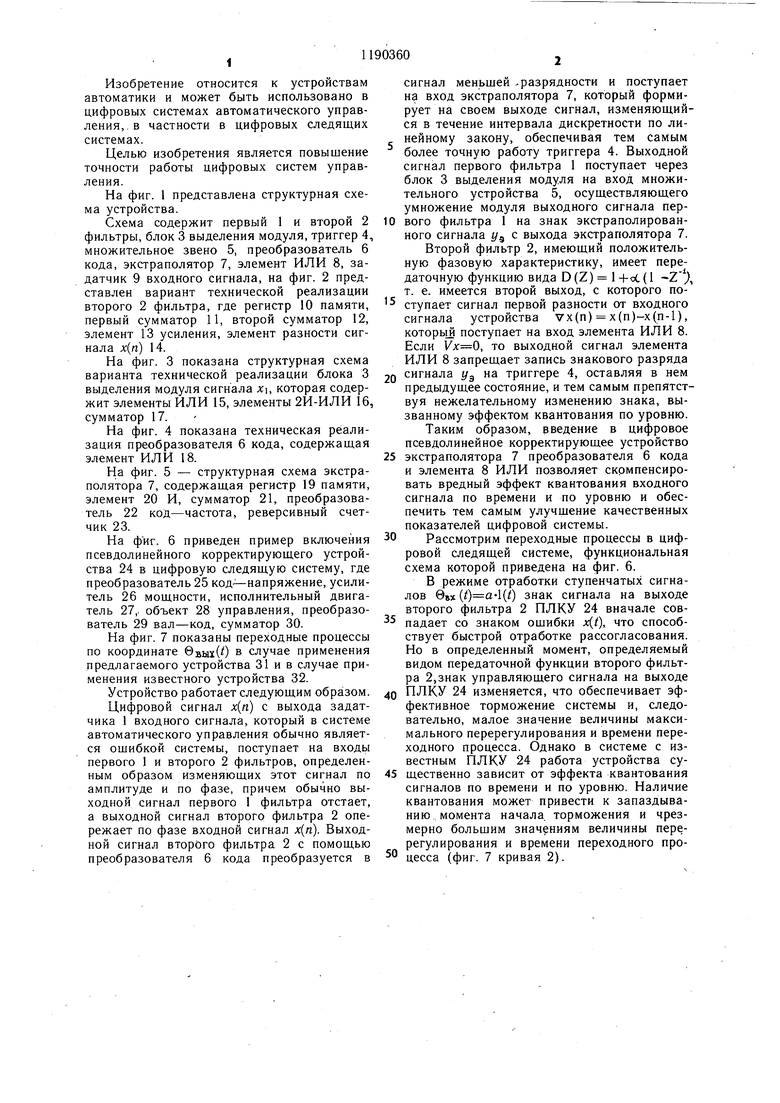
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровая динамическая следящая система | 1985 |
|
SU1285428A1 |
| Нелинейное корректирующее устройство с фазовым опережением | 1988 |
|
SU1718182A1 |
| Функциональный преобразователь | 1983 |
|
SU1166147A1 |
| Инкрементный умножитель аналоговых сигналов | 1983 |
|
SU1113820A1 |
| Следящая система | 1979 |
|
SU840798A1 |
| Цифровая динамическая следящая система | 1985 |
|
SU1290249A1 |
| Линейный экстраполятор | 1981 |
|
SU1023349A1 |
| Цифровое экстраполирующее устройство | 1983 |
|
SU1091171A1 |
| Цифровой следящий электропривод | 1981 |
|
SU1008703A1 |
| Система передачи и приема сигналов с дифференциальной импульсно-кодовой модуляцией | 1978 |
|
SU758513A1 |
ЦИФРОВОЕ ПСЕВДОЛИНЕЙНОЕ КОРРЕКТИРУЮЩЕЕ УСТРОЙСТВО, содержащее последовательно соединенные задатчик входного сигнала, первый фильтр, блок выделения модуля, множительное устройство, выход которого является выходом устройства, а также второй фильтр, вход которого соединен с входом первого фильтра, отличающееся тем, что, с целью повышения точности, дополнительно введены элемент ИЛИ, а также последовательно -включенные преобразователь кода, экстраполятор и триггер, выход которого соединен с вторым входом множительного звена, а второй вход через элемент ИЛИ - с вторым выходом второго фильтра. (Л о 00 о
г
ю
о «Q
Фиг. 4
фиг. 6
t
/Д
1,0
0,5
yy(fr)l
фиг.5
| Авторское свидетельство СССР № 411430, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Основы проектирования следящих .системуПод ред | |||
| Н | |||
| А | |||
| Лакоты, М.: Машиностроение, 1978, с | |||
| Автоматический тормоз к граммофону | 1921 |
|
SU303A1 |
| Прибор для промывания газов | 1922 |
|
SU20A1 |
