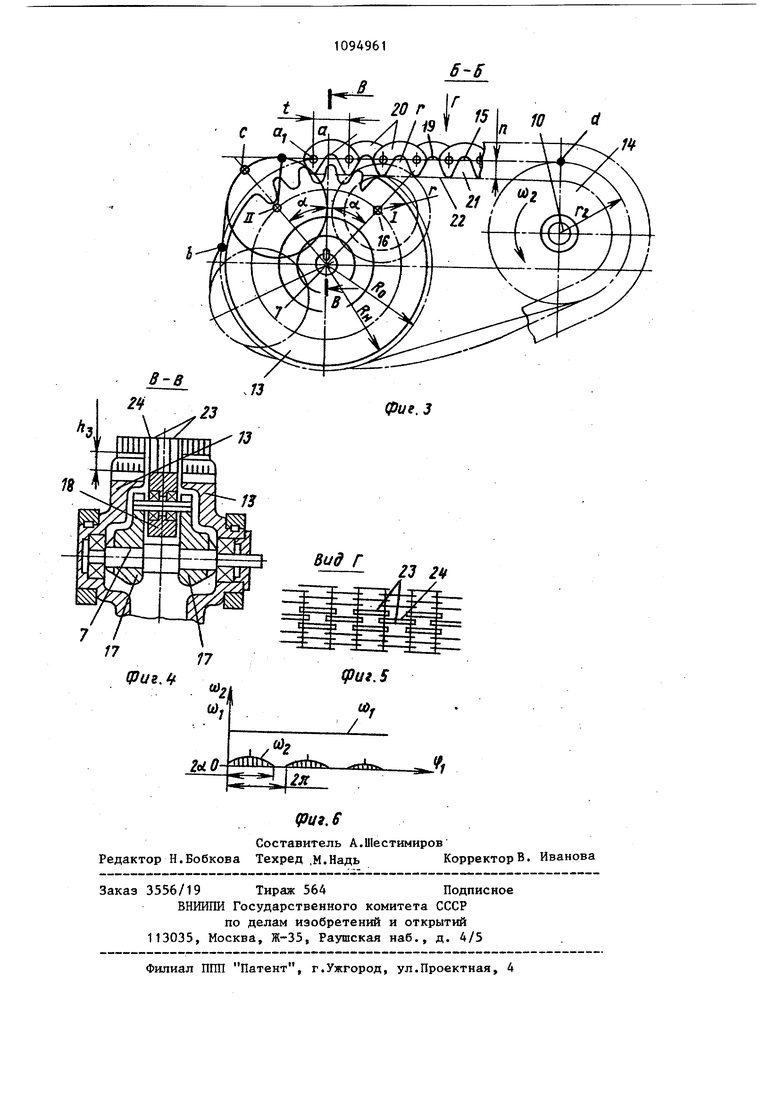
Изобретение относится к приводным передаточным устройствам горных машин, в частности к механизмам подачи (напора) экскаваторов типа прямая механическая лопата с независимьм напором ковша. Известен механизм независимой подачи (напора) прямой механической лопаты, включающий канатно-блочную и цепную передачу между напорным барабаном и рукоятью ковша. Преимуществом известного механизма является лучшая маневренность рабочего обо рудования и независимость напора от положения ковшэо pj. Недостатком механизма является то, что при выдвижении рукояти преодолевается не только сопротивление врезанию ковша в грунт, но и составляняцая усилия в подъемном канате. Ма шинист во избежание остановки двигателя вручную включает напорньй механизм периодически, рывками подавая рукоять вперед, что отрицательно ска зывается на работе привода и затруд няет работу машиниста. Кроме того, применение канатно-блочной передачи ограничено использованием этого меха низма в экскаваторах с однодвигатель ным приводом, т.е. в малых моделях одноковшовых машин. Известен также механизм независимости подачи (напора) прямой механической лопаты, включающий зубчатую передачу от двигателя к кремальерной шестерне и рейке рукояти. Преимущест вом этого механизма является возможность применения его в мощных экскаваторах с многомоторным приводом 2 К недостаткам относится также необходимость частого включения механизма, т.е. обеспечение прерывной подачи при ручном.управлении этими включениями, а также повьш1енная металлоемкость зубчатых передач пррвода. Наиболее близким к изобретению по технической сущности является механизм подачи горной машины, содержащей установленную на приводном валу двухвенцовую неподвижную звездочку, между венцами которой размещен роликовый генератор волн, ведомую звездочку и объединяющую их приводную гибкую связь,выполненную в виде трех-г рядной втулочно-роликовой цепи. Преимуществом известного механизма пода чи является автоматическое, без учас тия оператора прерывистое движение исполнительного органа, кинематически связанного с ведомым вало цепной передачи, а также небольшая металлоемкость механизма при обеспечении большого передаточного числа в одной ступени З. недостатками механизма подачи являются ограниченная тяговая способность ввиду применения втулочнороликовой цепи, а также многороликового генератора волн, обуславливающего ограничение числа зубьев неподвижной звездочки для передачи окружного усилия. Кроме того, повышенные динамические нагрузки, являющиеся следствием прерывистости линии взаимодействия роликов генератора волн и роликов втулочно-роликовой це:пи. когда окружная поверхность роликов генератора контактирует при обкатывании то с одним, то с несколькими роликами цепи, усиливая ее поперечные колебания. Целью изобретения является повышение тяговой способности и надежности работы дередачи. Поставленная цель достигается тем, что в механизме подачи горной машины, содержащем установленную на приводном валу двухвенцовую неподвижную звездочку, между венцами которой размещен роликовый генератор волн, ведомую звездочку и объединяющую их приводную гибкую связь, приводная гибкая связь выполнена в виде зубчатой цепи, снабженной трехрядными направляющими пластинами, перекрывающими одна другую в плоскости движения и контактирукмцими с генератором волн, имеющим один ролик. На фиг. 1 изображена общая схема приводного устройства подачи (напора) прямой механической лопаты; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2; на фиг. 4 - разрез В-В на фиг. 3; на фиг. 5 - вид Г на фиг. 3; на фиг.6 диаграмма скоростных характеристик предлагаемого механизма. Механизм 1 (фиг. 1) посредством реечной передачи 2 кинематически связан с рукоятью 3 ковша 4, имеющей отдельный привод механизма 5 подъема ковша 4. Механизм 1 подачи ковша (фиг. 2) включает цепную передачу 6 с ведущим валом 7, связанным зубчатой передачей 8 с отдельным электродвигателем 9, и ведомым валом 10, на котором установлены кремальерные шестерни 1 1 , связанные с рейками 12 реечной передачи 2. Таким образом рассматривается независимый механизм подачи (напора) прямой механической лопаты. Цепная передача 6 (фиг, 2-4) содержит двухвенцовую неподвижную звездочку 13, соосную с ведущим валом 7, ведомую звездочку 14, закрепленную на ведомом валу 10 и объединяющую их приводную гибкую связь 15 На ведущем валу 10 закреплен роликовый генератор 16 волн, образованный водилом 17с одним роликом 18. Гибкая связь 15 выполнена в виде зубчатой цепи 19, состоящей из .основных фигурных стальных звеньев 20 и снабженной трехрядными направляющими пластинами 21 с плоскими гранями 22, обращенными внутрь передачи и контактирующими с наружной поверхностью ролика 18 генератора 16 волн При этом в плоскости движения цепи эти грани образуют практически непре рывный линейньй профиль контакта це пи с роликом, поскольку трехрядное выполнение направлявяцих пластин обе печивает перекрытие соседних парных 23 и одиночных 24 пластин (фиг. в зоне контакта с роликом. Неподвижная звездочка 13 имеет наружный диаметр зубьев и начальный диаметр (д. Ролик 18 им ет радиус г (фиг. 3) наружной поверхности, контактирукхцей с плоским гранями 22 направляющих пластин. Ки нематическое взаимодействие роликов с цепью осуществляется по фиктивном радиусу роликов ф , определяемому из формулы , (-() где Ъ - расстояние от оси Ор шарнир цепи до плоской грани напра ляющей пластины (фиг. 3). Зубчатая цепь 19 имеет шаг t (фиг. 3). Радиус.окружности центра ролика 18 составляет R , а диаметр начальной окружности ведомой звездо ки 14 - 2 222, число зубьев неподвижной звездочки Z, а ведомой (под вижной) звездочки 22 Условием нормальной работы перед чи является такое соотношение геоме рических параметров, при котором об печивается вывод роликом зубьев основных звеньев 20 в зону некасания ими вершины зубьев неподвижной звездочки 13 согласно выражению (окрестности точки С и ей подобные, фиг. 3) ,,7/f где h- - расстояние ot оси 0 шарнира цепи довершины зуба основного звена 20 (фиг.4). Кроме того, число шагов цепи Z. в кривой асЪ (фиг. 3) должно быть больше числа шагов ZQ в отрезке дуги иЪ радиуса на целое число л 2 , причем Д2 2 Провисание холостой цепи должно соответствовать этому числу звеньев. Механизм работает следуняцим образом. Водило 17 с роликом 18 генератора 16 волн получает от двигателя 9, через зубчатую 8, вращение против часовой стрелки с постоянной угловой частотой uj При этом в положении 1 (фиг. 3) ролик 18, касаясь одного из направляющих звеньев 21 зубчатой цепи 19, оттягивает ее от неподвижной звездочки 13 и как-бы удлиняет рабочую (в данном случае верхнкио) ветвь цепи за счет выбора провиса холостой (в данном случае нижней) ветви цепи, что сопровождается соответс.твующим поворотом ведомой звездочки 14 с угловой частотой 002 против часовой стрелки. Этот процесс продолжается в течение угла поворота водила 17 на угол 2йЦ пока ролик 18 не займет положения П и цепь 19 снова не займет исходного в вертикальном направлении положения, т.е. не ляжет на звездочку так, что основные звенья 20 разместятся во впадинах зубьев звездочки. При этом длина верхней ветви в новом положении по контуру db равна e acfe+c4 a. Длина верхней ветви в исходном положении равна f cic+cid. Цепь 19 при этом перемещается на величину 4 ЛК -е, ок-.Ъ-ос. . Ъ г Но эта разность соответствует л 1шагов цепи согласно уравнению (3).
Величина угла oi находится из выражения
R«-i,
ф
0(. 0|ГСС05
в течение дальнейшего вращения генератора 16 волн ролик 18 вхолостую перегоняет гофр цепи «сЬ на нижнюю ветвь цепи. Это происходит в пределах угла поворота.
Затем в пределах такого же угла -j ролик 18 генератором волн перемещается между ветвями цепи 19. Таким образом, в течение угла поворота 2 -зг ведомая звездочка 14 остается неподвижной так, что
(JT-oO.
Таким образом, при равномерном непрерывном вращении генератора 16 волн ведомая звездочка 14 и ведомый вал 10 вращаются прерывисто, т.е. пульсационно (фиг. 6).
Среднее передаточное число механизма определяется выражением
f tp - ш„
uZ
2
Ведомый вал 10 посредством новленных на нем кремальерных рен 11 сообщает рейке 12 и рукояти 3 с ковшом 4 экскаватора прерывистое движение со скоростью Уц , необходимое при независимом напоре.
Обратное движение рукояти с ковшом обеспечивается реверсом двигателя 9. Генератор 16 волн вращается против часовой стрелки, касается роликом 18 нижней ветви цепи 19, передает, в течение одного - двух оборотов, слабину этой ветви на верхнюю, а затем обеспечивает вращение ведомой звездочки 14 против часовой стрелки и соответственно возврат рукоя-ти.
Таким образом, предлагаемый механизм подачи (напора) горной машины обеспечивает автоматически, без участия машиниста, прерывистость подачи (напора), например, ковша экскаватора, что необходш о при независимом напоре. При этом обеспечивается достаточная тяговая способность и снижение динамических нагрузок. Прочность цепи и звездочки уравниваются за счет применения одноролшсового генератора волн, поскольку в передаче нагрузки участвует значительно большое число зубьев неподвижной звездочки, чем ПРИ многороликовом генераторе волн.
fO 1
,фр
.тп (pui. 2
(риг, 5
Фиг, 10 tf

| название | год | авторы | номер документа |
|---|---|---|---|
| Передаточный механизм привода горной машины | 1985 |
|
SU1283376A1 |
| ПРИВОД НАПОРА КАРЬЕРНОГО ЭКСКАВАТОРА | 2016 |
|
RU2631060C2 |
| Механизм подачи канатно-цепной пилы | 1980 |
|
SU899925A1 |
| СПОСОБ ЭКСКАВАЦИИ ГРУНТА ОДНОКОВШОВЫМ ЭКСКАВАТОРОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2032029C1 |
| Привод канатно-цепных пил | 1985 |
|
SU1326732A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ КАРЬЕРНОГО ЭКСКАВАТОРА (ВАРИАНТЫ) | 2008 |
|
RU2407861C2 |
| Напорный механизм одноковшового экскаватора | 1980 |
|
SU901389A1 |
| Механизм подачи канатно-цепной пилы | 1980 |
|
SU935613A1 |
| ПРИВОД НАПОРА КАРЬЕРНОГО ЭКСКАВАТОРА | 2015 |
|
RU2631062C2 |
| Рабочее оборудование одноковшового экскаватора | 1978 |
|
SU994624A2 |
МЕХАНИЗМ ГОДАЧИ ГОРНОЙ МАШИНЫ, содержащей установленную на приводном валу двухвенцовзпо неподвижную звездочку, между венцами которой размещен роликовый генератор волн, ведомую звездочку и объединяющую их .приводную гибкую связь, отличающийся тем, что, с целью повышения тяговой способности и надежности работы передачи, приводная гибкая связь вьтолнена в виде зубчатой цепи, снабженной трехрядными направляняцими пластинами, перекрывающими одна другую в плоскости движения и контактирующими с генератором волн, имеющим один ролик. ;о 4; со о:
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Беркман И.Л | |||
| и др | |||
| Универсальньш одноковшовые строительные экскаваторы | |||
| М., Высшая школа, 1981,, с | |||
| Устройство для устранения мешающего действия зажигательной электрической системы двигателей внутреннего сгорания на радиоприем | 1922 |
|
SU52A1 |
| Приспособление для автоматической односторонней разгрузки железнодорожных платформ | 1921 |
|
SU48A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Экскаваторы | |||
| М., Машиностроение, 1964, с | |||
| Ротационный колун | 1919 |
|
SU227A1 |
| Аппарат для радиометрической съемки | 1922 |
|
SU124A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
