выходам первого и второго преобразователей кода, соединенных входами соответственно с выходами первого и второго блоков ключей, первый и второй входы элемента ИЛИ-НЕ подключены соответственно к выходу первого элемента Инк первому выходу блока контроля положения объекта по времени, соединенного вторым выходом с третьим входом элемента ИЛИ-НЕ, четвертый вход которого подключен к выходу второго элемента И, выход элемента ИЛИНЕ соединен с третьим входом блока управления исполнительным механизмо и управлякицим входом четвертого ключа, пятый вход блока контроля положения объекта по времени подключен к запускающему входу устройства.
2. Устройство ПОП.1, отличающееся тем, что блок контроля положения объекта по времени содержит первый и второй суммирующие счетчики, первый, второй и третий ключи, первый и второй триггеры, первый и второй элементы И, счетньш вход первого суммируницего счетчика подключен к выходу первого ключа, а выход - к
счетному входу первого триггера, счетньй вход второго суммирующего счетчгка соединен с выходом второго ключа, выход - со счетным входом второго триггера, прямые выходы первого и второго триггеров подключены к управляющим входам первого и второго ключей соответственно и через первый элемент И - к управляющему входу третьего ключа, выход третьего ключа соединен с информационными входами первого и второго ключей, инверсные выходы первого и второго триггеров подключены к входам второго элемента И, причем установочные входа суммирунлцих счетчиков являются соответственно третьим и четвертым входами блока контроля положения объекта по времени, пятьй вход которого является входом установки в 1 первого и второго триггеров, а информационные входы третьего и второго ключей являются соответственно первым и вторым входами блока контроля положения объекта по времени, первым и вторым выходами которого являются соответственно выходы первого и второго элементов И.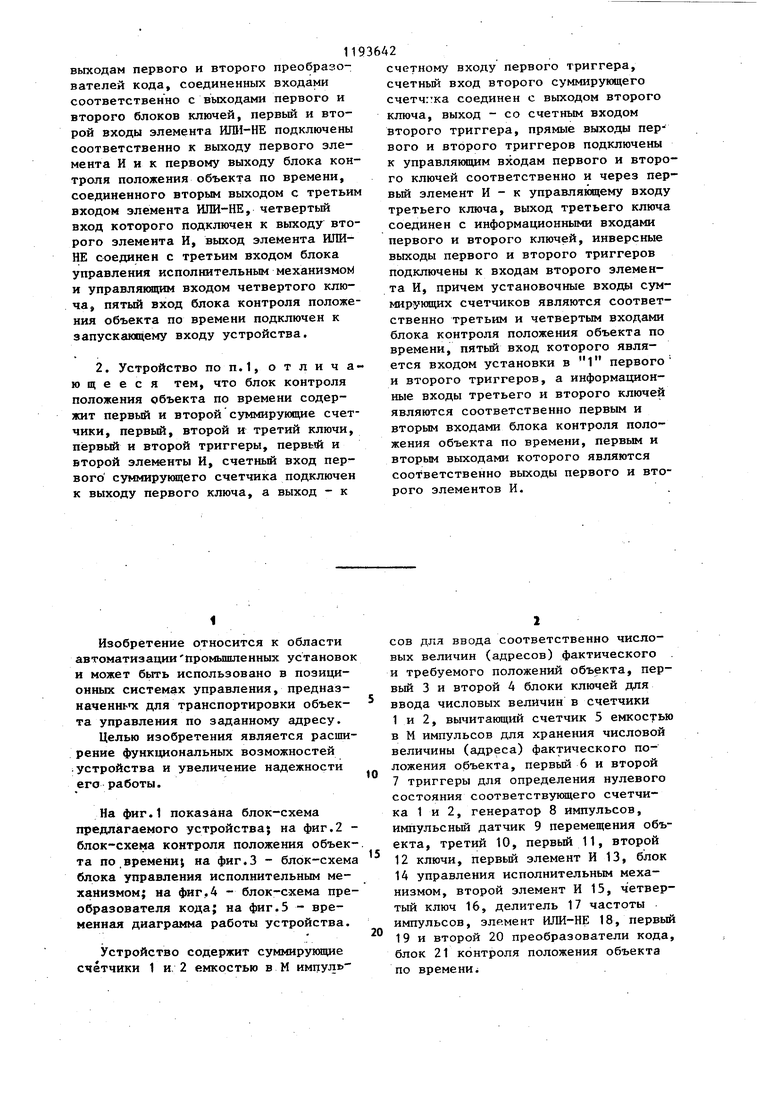

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления положением объекта | 1982 |
|
SU1075235A1 |
| Устройство для программного управления положением объекта | 1977 |
|
SU746425A1 |
| УСТРОЙСТВО КОРРЕКЦИИ ФОРМЫ КРИВОЙ НАПРЯЖЕНИЯ | 2014 |
|
RU2580944C1 |
| Устройство для селекции признаков подвижных объектов | 1989 |
|
SU1691860A1 |
| Устройство для автоматического выбора направления движения объекта | 1983 |
|
SU1154179A1 |
| ЦИФРОВОЕ ПЯТИКАНАЛЬНОЕ РЕЛЕ С ФУНКЦИЕЙ САМОДИАГНОСТИКИ | 2017 |
|
RU2671545C1 |
| МИКРОПРОГРАММНОЕ УСТРОЙСТВО УПРАВЛЕНИЯ | 1993 |
|
RU2079876C1 |
| Устройство для приема и передачи информации | 1991 |
|
SU1833871A1 |
| Устройство для считывания графической информации | 1989 |
|
SU1683046A1 |
| Устройство для сопряжения цифровой и аналоговой вычислительных машин | 1983 |
|
SU1128273A1 |
1. УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ОБЪЕКТА содержащее импульсный датчик переме-f щения объекта, блок управления исполнительным механизмом, первый и второй блоки ключей, первый и второй суммирующие счетчики, первый и второй триггеры, генератор импульсов, первый и второй элементы И, первый, второй и третий ключи и вычитающий счетчик, выход которого через первый блок ключей соединен с установочным входом первого суммирующего счетчика, подключенного счетным входом к выходу первого ключа, а выходом - к счетному входу первого триггера, счетный вход второго суммирующего счетчика соединен с выходом второго ключа, выход второго суммирутацего счетчика - со счетным входом, второго триггера, а установочный вход второго суммирующего счетчика - с выходом второго блока ключей, подсоединенного управляющим входом к управляющему входу первого ; блока ключей и к установочному вхо;ду устройства, а информационным входом - к информационному входу устройства, выход генератора импульсов подключен к информационному вхо-. ду третьего ключа, выход которого соединен с выходом импульсного датчика перемещения объекта и с информационными входами первого и iBTOpoго ключей, прямые выходы первого и второго триггеров подключены к управляющим входам первого и второго ключей соответственно и через первый элемент И - к управлякицему входу третьего ключа, инверсные выходы первого и второго триггеров соединень соответственно с первым и вторым входами блока управления испол(Л нительным механизмом и с первым и вторым входами второго элемента И, с счетный вход вычитающего счетчика подключен к выходу второго ключа, г а вход установки в О - к запускающему входу устройства и к входам установки в 1 первого и второго СО триггеров, отличающееся DO 9) тем, что, с целью расширения функциональных возможностей устройства, оно содержит четвертый ключ, делитель частоты импульсов, элемент ШШ-НЕ, первый и второй преобразователи кода и блок контроля положения объекта по времени, выход генератора импульсов подключен к первому входу блока контроля положения объекта по времени и входу делителя частоты импульсов, выход которого соединен с информационным входом четвертого ключа, выходом соединенного с вторым входом блока контроля положения объекта по времени, третий и четвертый входы которого подключены соответственно к
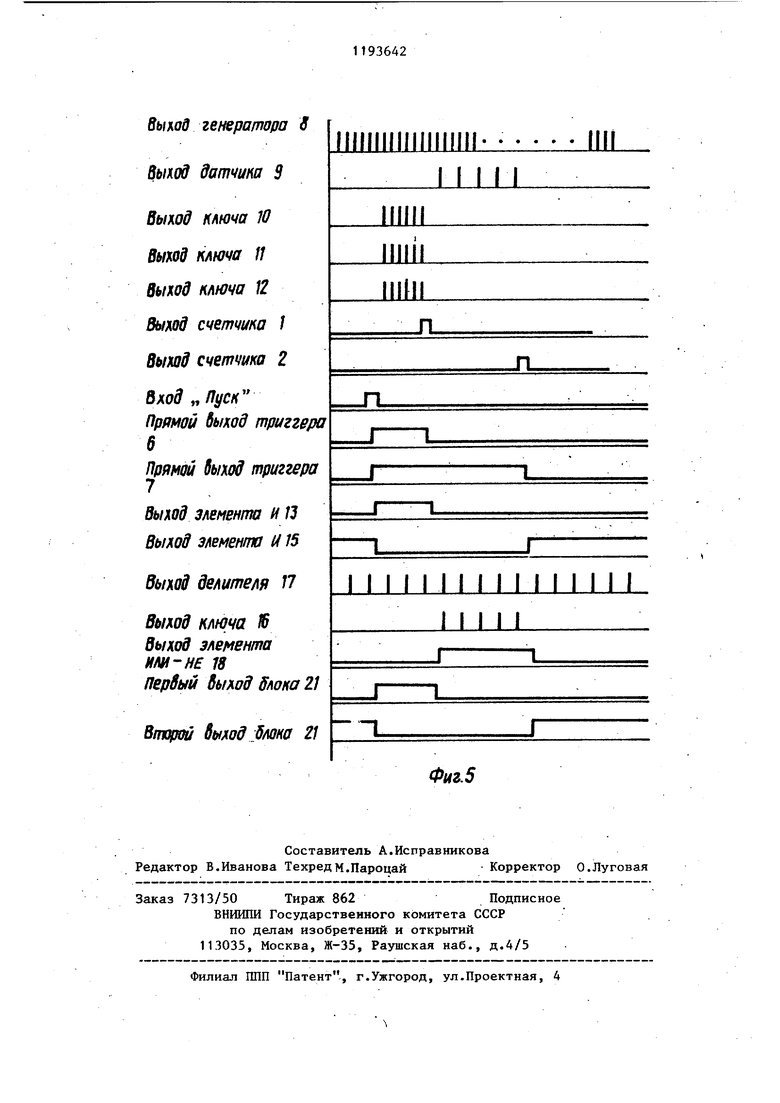
Изобретение относится к области автоматизацииПромышленных установо и может быть использовано в позиционных системах управления, предназначенньтс для транспортировки объек та управления по заданному адресу. Целью изобретения является расши рение функциональных возможностей ;устройства и увеличение надежности его работы. На фиг.1 показана блок-схема предлагаемого устройства; на фиг.2 блок-схема контроля положения объек та по времени; на фиг.З - блок-схем блока управления исполнительным механизмом; на фиг.4 - блок-схема пре образователя кода; на фиг.З - временная диаграмма работы устройства. . Устройство содержит суммирующие счетчики 1 и, 2 емкостью в М имцул сов дпл ввода соответственно числовых величин (адресов) фактического и требуемого положений объекта, первый 3 и второй 4 блоки ключей для ввода числовых величин в счетчики 1 и 2, вычитающий счетчик 5 емкостью в М импульсов для хранения числовой величины (адреса) фактического положения объекта, первый 6 и второй 7 триггеры для определения нулевого состояния соответствукщего счетчика 1 и 2, генератор 8 импульсов, импульсный датчик 9 перемещения объекта, третий 10, первый 11, второй 12 ключи, первый элемент И 13, блок 14 управления исполнительным механизмом, второй элемент И 15, четвертый ключ 16, делитель 17 частоты импульсов, элемент ИЛИ-НЕ 18, первый 19 и второй 20 преобразователи кода, блок 21 контроля положения объекта по времениi
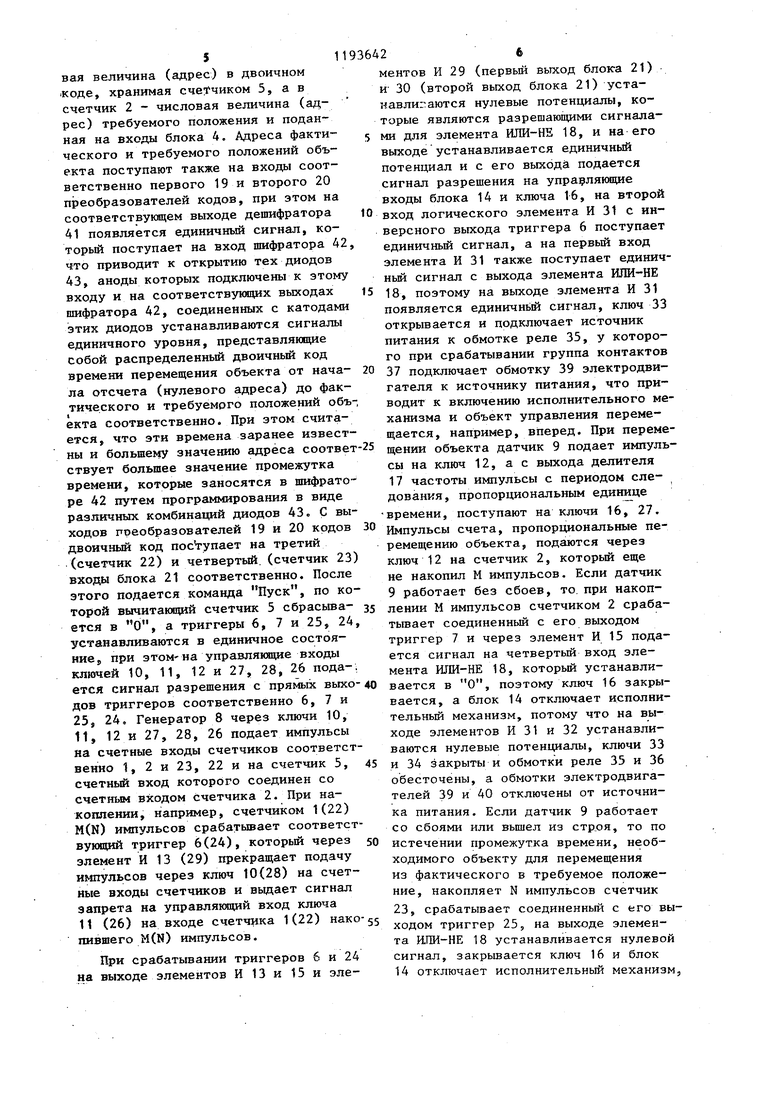
Блок 21 контроля положения объекта по времени (фиг.2) содержит первый 22 « второй 23 суммирукицие счетчики емкостью в N импульсов для ввода соответственно числовых величин времени перемещения объекта от начала отсчета (нулевого адреса) до фактического и требуемого положений объекта, первый U и второй 25 триггеры для определения нулевого состояния соответственно счетчиков 22 и 23, первый 26, второй 27 и третий 28 ключи, первый 29 и второй 30 элементы И. При этом выход первого 19 преобразователя кода подключен к установочному входу первого 22 суммирующего счетчика, подключенного счетным входом к выходу первого 26 ключа, а выход - к счетному входу первого 24 триггера. Счетный вход второго 23 суммирующего счетчиха соединен с выходом второго 27 ключа, выход - со счетным входом второго 25 триггера, а установочный вход с выходом второго 20 преобразователя кода. Выход генератора 8 импульсов подключен к информационному входу третьего ключа 28. Прямые выходы первого 24 и второго 25 триггеров соединены с управляющими входами первого 26 и второго 27 ключей соответственно и через первый элемент И управляющим входом третьего ключа 28. Выход первого элемента И 29 соединен с вторым входом элемента ИЛИНЕ 18. Выходы четвертого 16 и третьего 28 ключей соединены с информационными входами первого 26 и второго
27ключей. Запускакиций вход устройства подключен к входам установки в
1 первого 24 и второго 25 триггеров. Инверсные выходы первого 24 и второго 25 триггеров подключены через второй 30 элемент И к третьему входу элемента ИЛИ-НЕ 18. Установочные входы суммирующих счетчиков 22 и 23 являются соответственно третьим и четвертым входами блока 21, пятый вход которого является входом установки в 1 первого 24 и второго 25 триггеров, а информационные входы третьего
28и .второго 27 ключей являются соответственно первым и вторым входами блока 21, первый и вторым выходами которого являются соответственно выходы первого29 ивторого 30элементов М.
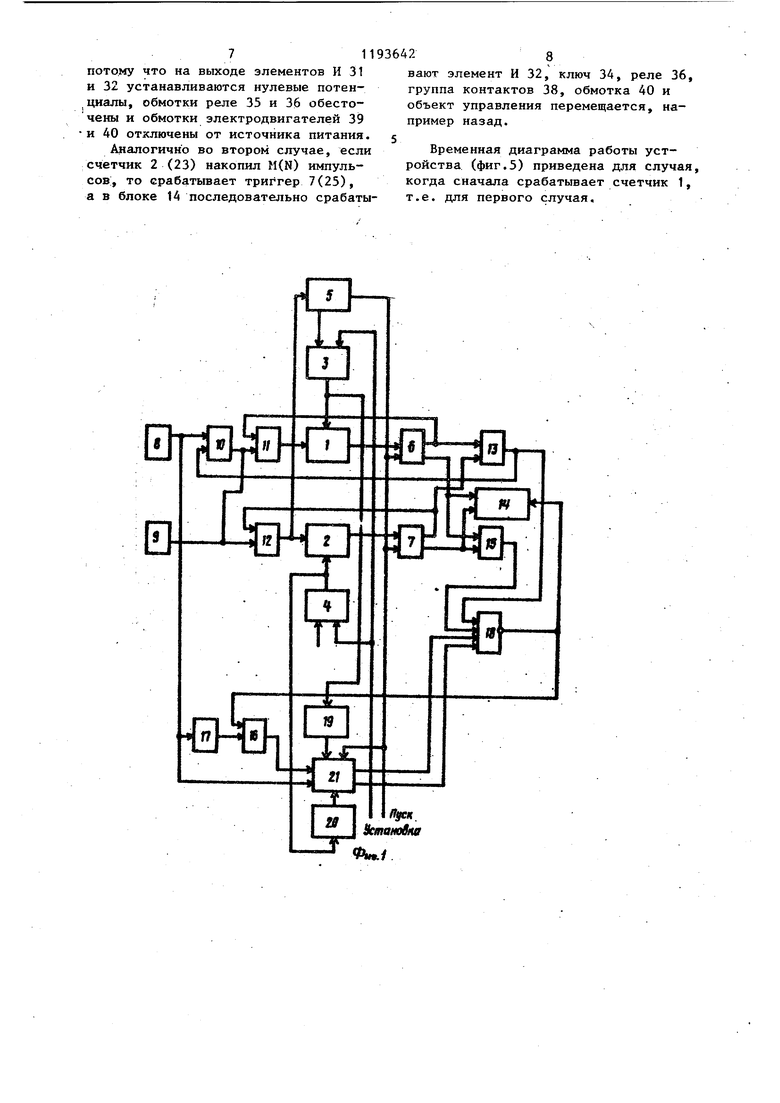
Блок 14 управления исполнительным . еханизмом (фиг.З) содержит первый
31 и второй 32 элементы И, первый ЗТ и второй 34. ключевые элементы, первую
35и вторую 36 обмотки реле, группы контактов - первую 37 и вторую 38,
5 соответственно первого 35 и второго
36реле, первую 39 и вторую 40 обмотки электродвигателей исполнительного механизма. При этом первые входы первого 31 и втррого 32 элементов И являются соответственно первым и вторым входами блока 14 управления а их вторые входы соединены между собой и являются третьим входом блока 14, выходы элементов И 31 и 32 подключены к управляю1дим входам ключе- вых элементов 33 и 34, выходы которых подключены к обмоткам реле 35 и 36 соответственно. Обмотки 39 и 40 электродвигателей через контакты 37
) и 38 соответственно подключены к Источнику питания (на чертеже не показан) , информационные входы ключей 33 и 34 подключены к источнику питания.
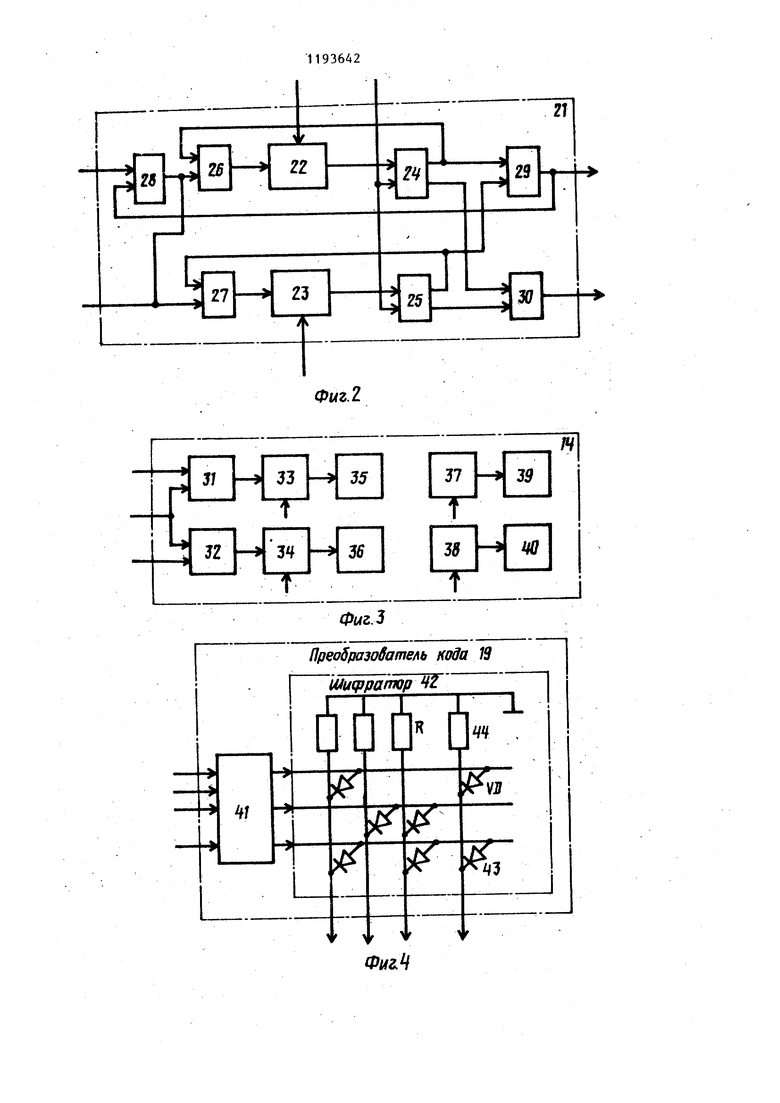
5 Блок-схемь преобразователей кода 19 и 20 одинаковы и содержат (фиг.4) последовательно соединенные дешифратор 41 и шифратор 42, предетавляю|ций собой дизъюнктивную программируемую
0 логическую матрицу, содержащую набор диодов 43 и нагрузочных резисторов 44. Входы дешифратора 41 являются входами преобразователя 19 кода, выходами которого являются выходы программируемой логической матрицы 42.
Устройство работает следующим образом. I
В исходном состоянии устройства триггеры 6, 7и25, 24 и счетчики 1, 2 и 23, 22 находятся в нулевом состоянии, счетчик 5 хранит числовую величину (адрес) фактического положения, ключи 10, 11, 12 и 27, 28,.
26 закрыты сигналами с пряьшх выходов триггеров 6, 7 и 25, 24 соответственно, с инверсных выходов которых через элементы И 15 и 30 подается единичный потенциал на входы элемента ИЛИ-НЕ 18 и на его выходе устанавливается нулевой потенциал, и с выхода элемента ИЛИ-НЕ 18 подается, запрет на включение четвертого ключа 16 и блока 14 управления исполни-
тельным механизмом.
На управляющие входы блоков 3 и 4 подается команда Установка, по которой в счетчик 1 заносится числовая величина (адрес) в двоичном .коде, хранимая счетчиком 5, а в счетчик 2 - числовая величина (адрес) требуемого положения и поданная на входы блока 4, Адреса фактического и требуемого положений объекта поступают также на входы соответственно первого 19 и второго 20 преобразователей кодов, при этом на соответствующем выходе дешифратора 41 появляется единичный сигнал, который поступает на вход шифратора 42 что приводит к открытию тех диодов 43, аноды которых подключены к этому входу и на соответствунщих выходах шифратора 42, соединенных с катодами этих диодов устанавливаются сигналы единичного уровня, представляющие собой распределенный двоичный код времени перемещения объекта от начала отсчета (нулевого адреса) до фактического и требуемого положений объекта соответственно. При этом считается, что эти времена заранее известны и большему значению адреса соответ ствует большее значение промежутка времени, которые заносятся в шифраторе 42 путем программирования в виде различных комбинаций диодов 43. С выходов преобразователей 19 и 20 кодов двоичный код поступает на третий (счетчик 22) и четвертый, (счетчик 23) входы блока 21 соответственно. После этого подается команда Пуск, по которой вычитающий счетчик 5 сбрасьюается в О, а триггеры 6, 7 и 25, 24, устанавливаются в единичное состояние,, при ЭТОМна управляняцие входы ключей 10, 11, 12 и 27, 28, 26 пода-, ется сигнал разрешения с прямых выходов триггеров соответственно 6, 7 и 25J 24, Генератор 8 через ключи 10, It, 12 и 27, 28, 26 подает импульсы на счетные входы счетчиков соответственно 1, 2 и 23, 22 и на счетчик 5, счетный вход которого соединен со счетным входом счетчика 2. При накоплении, например, счетчиком 1(22) M(N) иьтульсов срабатывает соответствующий триггер 6(24), который через элемент И 13 (29) прекращает подачу импульсов через ключ 10(28) на счетные входы счетчиков и вьщает сигнал запрета на управлякяций вход ключа It (26) на входе счетчика 1(22) HaKoпившего M(N) импульсов.
При срабатывании триггеров 6 и 24 на выходе элементов И 13 и 15 и элементов И 29 (первый выход блока 21) И 30 (второй выход блока 21) устанавливаются нулевые потенциалы, которые являются разрешающими сигналами для элемента ИЛИ-НЕ 18, и на его выходе устанавливается единичный потенциал и с его вьгхода подается сигнал разрешения на упра ляюпще входы блока 14 и ключа 16, на второй вход логического элемента И 31 с инверсного выхода триггера 6 поступает единичный сигнал, а на первый вход элемента И 31 также поступает единичньй сигнал с выхода элемента ИЛИ-НЕ 18, поэтому на выходе элемента И 31 появляется единичной сигнал, ключ 33 открывается и подключает источник питания к обмотке реле 35, у которого при срабатывании группа контактов 37 подключает обмотку 39 электродвигателя к источнику питания, что приводит к включению исполнительного механизма и объект управления перемещается, например, вперед. При перемещении объекта датчик 9 подает импульсы на ключ 12, ас выхода делителя 17 частоты импульсы с периодом следования, пропорциональным единице
времени, поступают на ключи 16, 27. Импульсы счета, пропорциональные перемещению объекта, подаются через ключ 12 на счетчик 2, который еще не накопил М импульсов. Если датчик 9 работает без сбоев, то при накоплении М импульсов счетчиком 2 срабатывает соединенный с его выходом триггер 7 и через элемент И 15 подается сигнал на четвертый вход элемента ИЛИ-НЕ 18, который устанавливается в О, поэтому ключ 16 закрывается, а блок 14 отключает исполнительный механизм, потому что на выходе элементов И 31 и 32 устанавливаются нулевые потенциалы, ключи 33 и 34 закрыты и обмотки реле 35 и 36 обесточены, а обмотки электродвигателей 39 и 40 отключены от источника питания. Если датчик 9 работает со сбоями или вьш1ел из стр.оя, то по истечении промежутка времени, необходимого объекту для перемещения из фактического в требуемое положение, накопляет N импульсов счетчик 23, срабатывает соединенный с его выходом триггер 25, на выходе элемента И.ТШ-НЕ 18 устанавливается нулевой сигнал, закрьшается ключ 16 и блок 14 отключает исполнительный механизм
потому что на выходе элементов И 31 и 32 устанавливаются нулевые потенциалы, обмотки реле 35 и 36 обесточены и обмотки электродвигателей 39 и 40 отключены от источника питания. Аналогично во втором случае, если счетчик 2 (23) накопил M(N) импульсов, то срабатывает триггер 7(25), а в блоке 14 последовательно срабатыЕ1гйда-вают элемент И 32, ключ 34, реле 36, группа контактов 38, обмотка 40 и объект управления перемещается, наприме р на 3 ад.
Временная диаграмма работы устройства (фиг.5) приведена для случая, когда сначала срабатывает счетчик 1, т.е. для первого случая.
%«.
Ясяюмовм 4tW/
Фиг. 2
Фмг.З
Фиг.
| Устройство для программного управления положением объекта | 1977 |
|
SU746425A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Патент США № 3940675, кл | |||
| Способ изготовления фасонных резцов для зуборезных фрез | 1921 |
|
SU318A1 |
| Планшайба для точной расточки лекал и выработок | 1922 |
|
SU1976A1 |
