1
Изобретение относится к области автоматизации промьштенных устано- . вок, может быть использовано в позиционных системах управления, предназначенных для транспортировки объекта управления по заданному адресу.
, Известно устройство для цифрового управления положением, содержащее счетчики для ввода адреса фактического положения и адреса требуемого положения объекта, ключи на счетных входах счетчиков, . счетчик для хранения адреса фактического пЬложения, ключи для уста- : новки в счетчики числовых величин, импульсный осциллятор, под действием которого происходит вычитание содержимого счетчиков, импульсный генератор перемещения Ш .
Известно также устройство, которое содержит два вычитающих счетчика для ввода адресов фактического и требуемого положений объекта, соединенные с их счетными входами ключи, ключи для установки в счетчики числовых величин, выходы счетчиков соединены с входами коман-. днрго устройства изменения скорости,
счетчик фактического положения объекта, информационные выходы которого соединены с ключами установки первого счетчика, генератор импульсов,под действием которого происходит вычитание содержимого двух вычитающих счетчиков до тех.пор,пока одна числовая величина, хранящаяся в одном из счетчиков, (не станет рав10ной нулю, импульсный датчик перемещений объекта, который .одновреА йно подает свои сигнгшы к счетчяпйу фактического положения и к тому вычитающему счетчику, числовая величина в которс « еще не стала ргшна нулю с целью выполнения действий сложения и вычитания 2 .
Недостатком известного устройства является невоэможиость управления объектом со случайным характером, адресаций, каждая позиция которого имеет строго определенный адрес (например, управление кабн25 ной лифта, управление устройством загрузки группы станков и т.п.), потому, что в устройстве не определяется направление перемкдения объекта в зависимости от входимой 30 числовой величины требуемого -nrnTo ния. При перемещении объекта в заданном направлении числовая величина, хранимая счетчиком фактического положения, суммируется с разностью числовых величин, вводимых в вычиxafoiime счетчики,определяется новое фактическое.положение объекта.
Цель изобретения - расширение функциональных возможностей и упрощение устройства.
Поставленная цель достигается тем, что устройство для программного управления положением объекта, содержащее импульсный датчик перемещения объекта, блок управления исполнительным механизмом, вычитающий счетчик, выход которого через первый блок ключей соединен с установочным входом первого суммирующего счетчика, подключенного счетным входом квыходу первого ключа, а выходом - к счетному входу первого триггера, второй суммирующий счетчик счетный вход которого соединен с выходом второго ключа, выход - со счетным входом второго триггера, а установочный вход - с выходом второго блока ключей, подсоединенного соответствующим входом к одному из входов первого блока ключей и к установочному входу устройства, и генерато импульсов, выход которого подключен к информационному входу третьего ключа, дополнительно содержит первый и второй элементы И, прямые выходы первого и второго триггеров соединены с управляющими входами первого и второго ключей соответственно и через первый элемент И - с управляющим входом третьего ключа, инверсные выходы первого и второго триггеров подключены соответственно к первому и второму входам, а также через второй элемент И - к третьему входу блока управления исполнительным механизмом выходы импульсного датчика перемещения объекта и третьего ключа соединены с информационными входамипервого и второго ключей, счетный вход вычитающего счетчика подсоединен к выходу второго ключа, а вход установки в нуль - и запускаюш.ему входу устройства и к входам установки в единицу первого и второго триггеров.
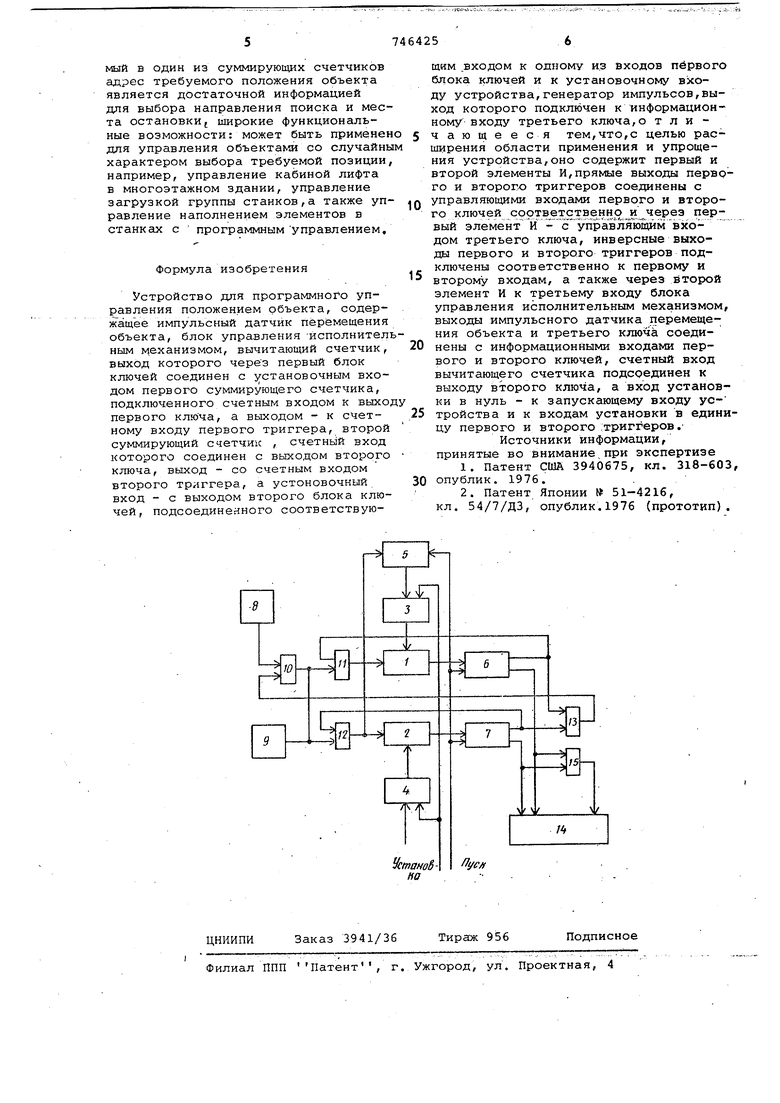
На чертеже изображена блок - схема предлагаемого устройства.
Устройство содержит суммирующие счетчики 1-2.емкостью в М импульсов для ввода соответственно числовых величин (адресов) фактического и требуемого положений объекта, первый 3 и второй 4 блоки ключей для ввода числовых величин в счетчики 1-2, вычитающий счетчик 5 емкостью в М импульсов для хранения числовой взличивы (адреса) фактического положения объекта,первый б и второй.7 триггеры для определения нулевого состояния соответственно сче.тчика 1,2, геяератор 8 импульсов, импульсный датчик 9 перемещения объекта,третий 10, первый 11, второй 12 ключи, первый элемент И 13, блок 14 управления исполнительным механизмом, второй элемент И 15.
Работает устройство следующим образом.
В исходном состоянии устройства триггеры 6-7 и счетчики 1-2 находятся в нулевом состоянии, счетчик 5 хранит числовую величину (адрес) . фактического положения, ключи 10-12 закрыты сигналами с прямых выходов триггеров 6-7, с инверсных выходов которых через элемент 15 подается запрет на включение блоком 14.
На управляющие входы блоков 3-4 подается команда Установка, по которой в счетчик 1 заносится числовая величина (адрес), хранимая счечиком 5, а в счетчик 2 числовая величина (адрес) требуемого положения и поданная на входы блока 4,после этПуск
го подается команда
по которой вычитающий счетчик 5 сбрасывается в нуль, а триггеры 6 и 7 устанавливаются в единичное состояние, при этом управляющие входы ключей 10-1 подается сигнал разрешения с прямых выходов триггеров 6-7, генератор 8 через ключи 10-12 подает импульсы на счетньяе входы счетчиков 1-2 и на счетчик 6, счетный вход которого соединен со счетным входом счатчика 2. При накоплении счетчиком 1 или 2 М импульсов срабатывает соответствующий триггер б или 7, который через элемент И 13 прекращает подачу импульсов через ключ 10 на счетные входы счетчиков и выдает сигнал запрета на управляющий вход ключа на входе счетчика накопившего .М импульсов .
При срабатывании триггера 6 или с инверсного его выхода подается сигнал, соединенный с ним вход блока 14, по кoтopo iy блок 14 подключает исполнительный механизм, перемещающий объект управления в необходимом направлении. При перемещении объекта датчик 9 подает импульсы на ключи 11-12. Импульсы счета, прпорциональНЕле перемещению объекта, подаются через ключ 11 или 12 на тот счетчик который еще не накопил М импульсов. При накоплении М импульсов вторым счетчиком срабатывает соединенный с его выходом триггер и через элемент И 15 подается сигнал на вход блока 14, отключающего исполнительный механизм.
При этом на вычитающем счетчике 5, независимо от направления перемещения, установится числовая величина (адрес) выбранного положения.
Данное устройство имеет простое схемное решение, не требует сложной управляющей программы, вводи
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления положением объекта | 1984 |
|
SU1193642A1 |
| Устройство для управления положением объекта | 1977 |
|
SU744462A1 |
| Устройство для программного управления положением объекта | 1982 |
|
SU1075235A1 |
| Устройство для автоматического выбора направления движения объекта | 1983 |
|
SU1154179A1 |
| ЦИФРОВОЕ ФАЗОСМЕЩАЮЩЕЕ УСТРОЙСТВО | 2017 |
|
RU2658598C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ ТРЕВОЖНОГО ИЗВЕЩЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2007 |
|
RU2379759C2 |
| ТЕЛЕМЕХАНИЧЕСКАЯ СИСТЕМА "ЛИЛАНА-ВИЯ" И СИГНАЛИЗАЦИОННОЕ ЗАГРАЖДЕНИЕ С ИЗВЕЩАТЕЛЕМ В.И. ЯЦКОВА | 2012 |
|
RU2491646C1 |
| Устройство для программного управления перемещением объекта | 1977 |
|
SU741233A1 |
| Система программного управления электроприводом | 1987 |
|
SU1481708A1 |
| Система адаптивного числового программного управления металлорежущим станком | 1980 |
|
SU954945A1 |
