f
Изобретение относится к подъемнотранспортному машиностроению и может быть использовано непосредственно в адресователях для управления строительным подъемником.
Цель изобретения - повышение надежности работы и уменьшение габаритов адресователя.
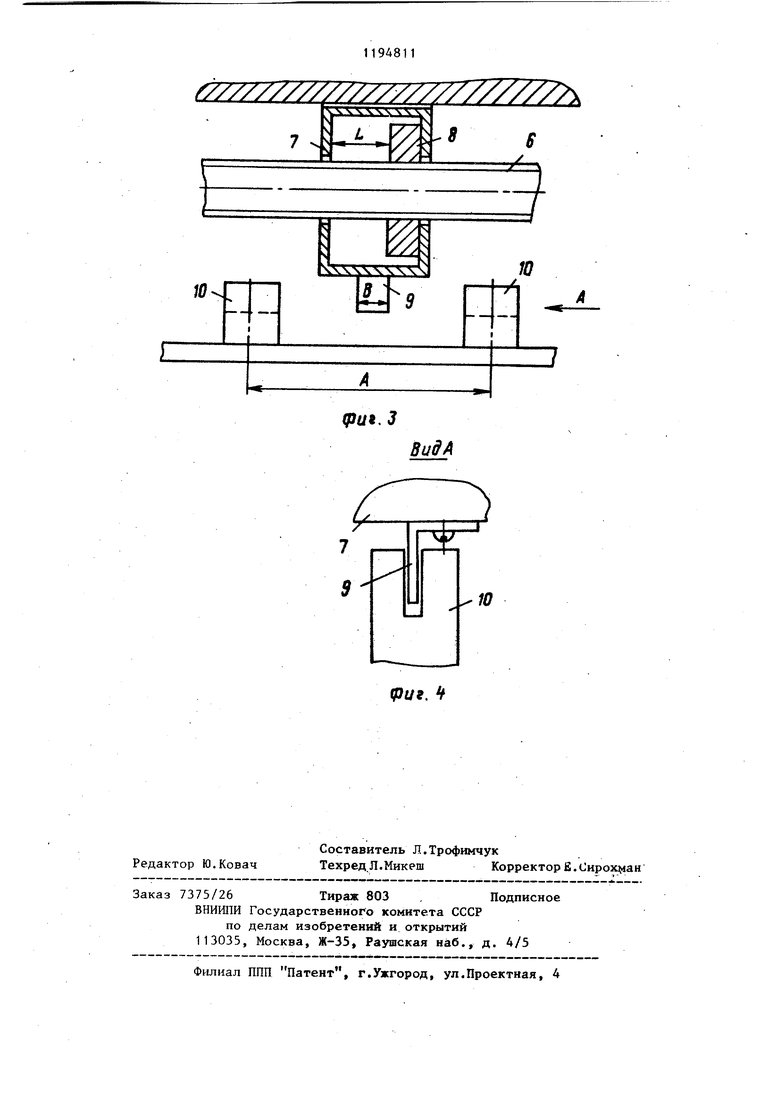
На фиг. 1 схематически изображен мачтовый подъемник, вид сбоку; на фиг. 2 - то же, вид сверху; на фиг. 3 - исполнительное устройство, вид сверху; на фиг. 4 - вид по стрелке А на фиг. 3.
Адресователь для управления строительным подъемником включает в себя привод 1, грузовой канат 2, закрепленный на барабане 3 и запасованный через нижний отводной блок 4 и верхние отводные блоки 5. Вал нижнего отводного блока 4 жестко связан с ходовым винтом 6, на котором имеется каретка 7 с расположенной внутри гайкой 8. Гайка 8 имеет свободный ход L относительно каретки 7. На каретке 7 установлен элемент 9, взаимодействующий с позиционными выключателями 10, расположенными вдоль винта 6 на расстоянии А друг от друга. Элемент 9 имеет размер В по ходу взаимодействия с позиционным выклю- чателем 10, который имеет дифферен-циал хода и , т.е. расстояние между точками прямого и обратного срабатывания по ходу перемещения воздействующего элемента 9. Величина свободного хода L гайки 8 определяется по формуле L В + А, а расстояние между бсямя позиционных выключателей из соотношения А L + .
948111
Адресователь работает следующим образом.
Позиционные выключатели по числу заданных остановок устанавливаются
5 вдоль ходового винта 6. Для осуществления нормальной коммутации в цепи управления (не показана) шаг резьбы ходового винта 6 выбирается так, что расстояния между осями позиционtO ных выключателей не нарушают указанного соотношения.
Привод 1 включается в работу, ба рабан 3 наматывает на себя канат 2. За счет движения каната 2 вращается 15 блок 4, а вместе с ним ходовой винт 6. Гайка 8 с кареткой 7 перемещается вдоль винта 6 и элемент 9 взаимодействует с позиционным выключателем 10, включенным в цепь управления. Позиционный выключатель 10 отключает привод 1 .
Для обеспечения точной остановки при движении подъемника в другую сторону гайка 8 имеет свободный ход
25 L относительно каретки 7, величина которого равна сумме, размера д. элемента 9 по ходу взаимодействия с выключателем 10 и величины дифференциала последнего. При движении в другую сторону гайка 8 проходит расстояние L, затем начинает двигаться каретка 7 с элементом 9. Когда элемент
9подойдет к выключателю 10, цепь управления разрывается и привод 1
jr остановится:.
В случае применения выключателя
10с отличным дифференциалом от рас. четного точная, настройка осуществлядд ется подгонкой размера элемента 9.
(риг, 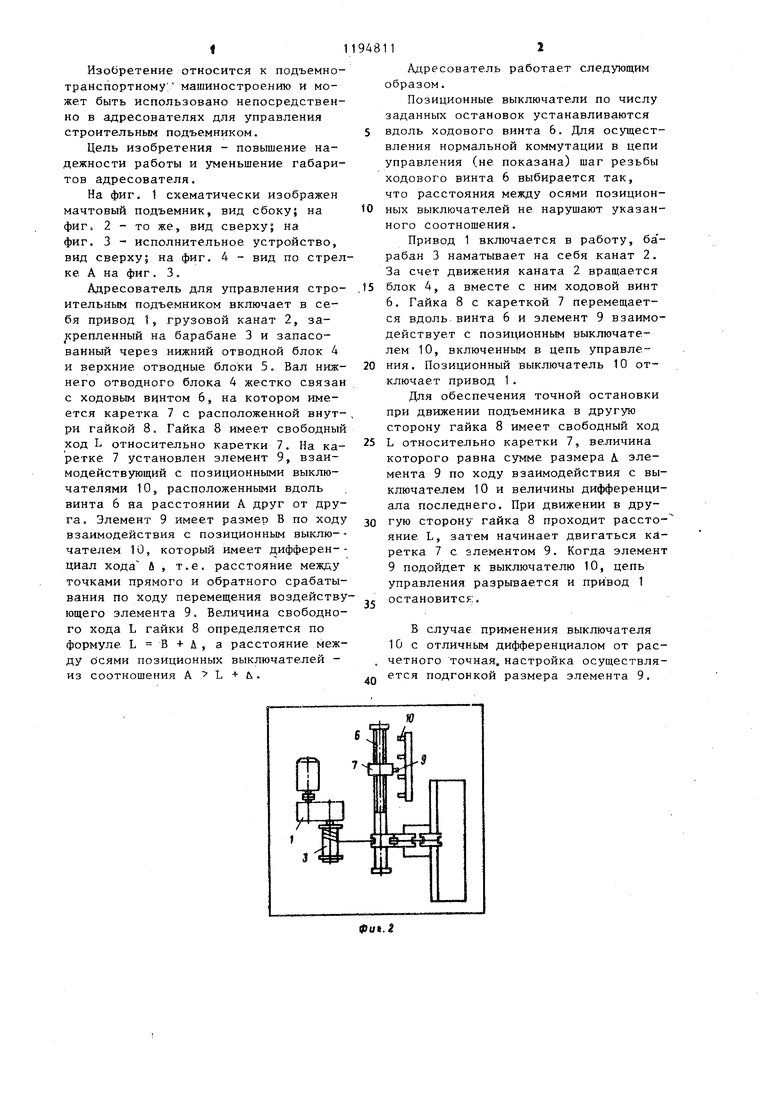
| название | год | авторы | номер документа |
|---|---|---|---|
| Адресователь для управления строительных подъемников | 1972 |
|
SU447347A1 |
| Устройство для управления реверсивным электродвигателем строительного подъемника | 1978 |
|
SU753760A1 |
| Адресователь грузового подъемника | 1977 |
|
SU673573A1 |
| АДРЕСОВАТЕЛЬ ГРУЗОВ ПОДЪЕМНИКОВ';«;дтечтно-тох;-;^чо>& ,..-Ji!?^jiK:bT>&?HmMF:, | 1969 |
|
SU249277A1 |
| Адресователь грузового подъемника | 1982 |
|
SU1049397A2 |
| Рыбозащитное устройство для водозаборного сооружения | 1985 |
|
SU1418404A1 |
| Грузонесущий орган строительного подъемника | 1984 |
|
SU1234336A1 |
| Адресователь груза подъемника | 1974 |
|
SU554198A1 |
| Канатоукладчик | 1976 |
|
SU596537A1 |
| Адресователь грузового подъемника | 1976 |
|
SU582165A1 |
АДРЕСОВАТЕЛЬ ДЛЯ УПРАВЛЕНИЯ СТРОИТЕЛЬНЫМ ПОДЪЕМНИКОМ, содержащий задающее и исполнительное устройства, причем последнее из них выполнено в виде винта, взаимосвязанного с приводом его перемещения и снабженного гайкой, установленной с возможностью свободного хода относительно каретки, несущей элемент, воздействующий на позиционные конечные выключатели управления, установленные в электроцепи задающего и исполнительного устройств, о т л а ю щ л и с я тем, что, с целью повьшения надежности работы и уменьшения габаритов, величина свободного хода гайки относительно каретки равна сумме размера элемента по ходу взаимодействия с позиционными конечными выключателями и величины дифференциала каждого из позиционных конечных выключателей, при этом расстояние между осями позиционных конечных выключателей не i превышает суммы величины свободного хода гайки относительно каретки и (Л величины дифференциала каждого из позиционных конечных выключателей.
| Устройство для испытания текстильныхМАТЕРиАлОВ HA ОСыпАЕМОСТь НиТЕй | 1979 |
|
SU828084A1 |
