. , I
Изобретение относится к подъемнотранспортным устройствам и может быть использовано для адресования грузов в строительных подъемниках.
Наиболее близким техническим решением вз из вестных к предлагаемому является адресователь подъемника, содержащий задатчйк с валом, снабженным i oяткой и шкалой, исполнирельный механиз содержащий храповое устройсто, качаюг пшйся ьоводок, соединенньй р подпрузкнненным электромагиит(%1, и эксцентрик, взаимодействующий с кЬнёчнШ| вШлючателем электрдаческой цепи двигателя грузовой лебедки 1.
Однако у известного устройства сравнителыю невысокая надежность, обусловленная сложностью ксжструкнии.
Цель изобретения - повышение надежноста.
Эта цель достигается тем, что предлагаемъ1й ад1:юсователь снабжен допопнительньш конечным выключателем, вклю ненным параллельно конечному выключателю электрической цепи двигателя грузовой лвбедаси, а на валу задатчика установлен кулйчок, взаимодействующий с дополнительным конечным выключателем, причем храповое устройство вьшопнено нереверсивнь1м.
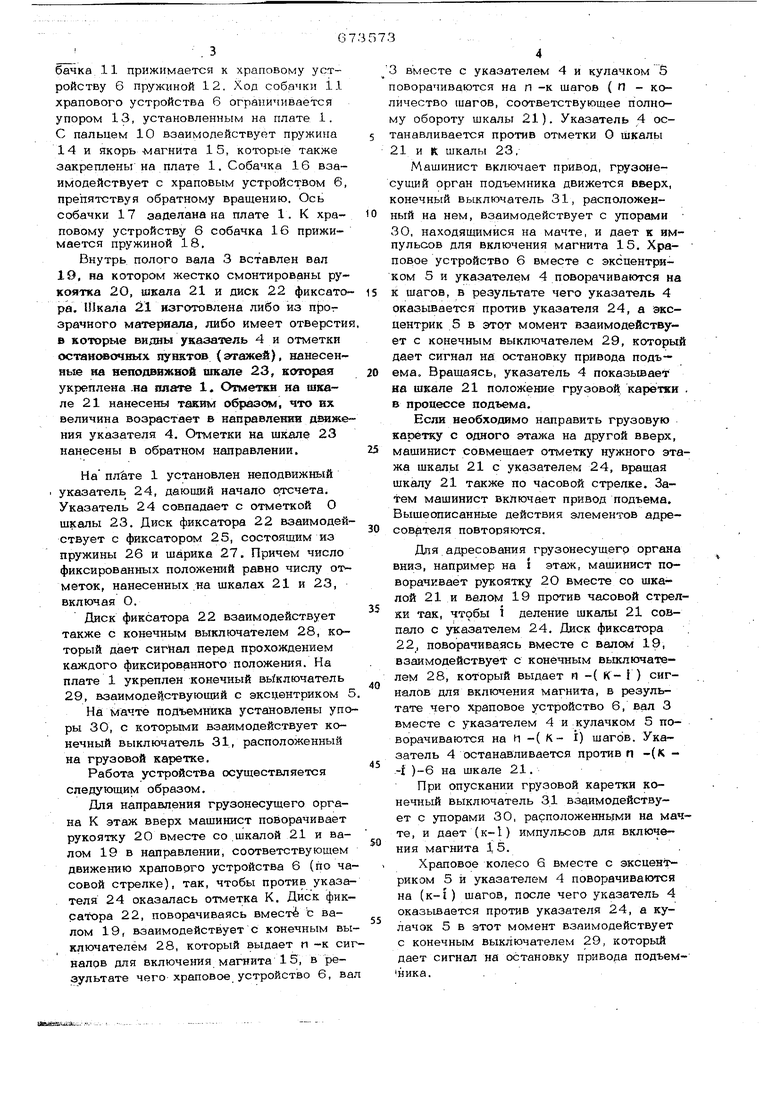
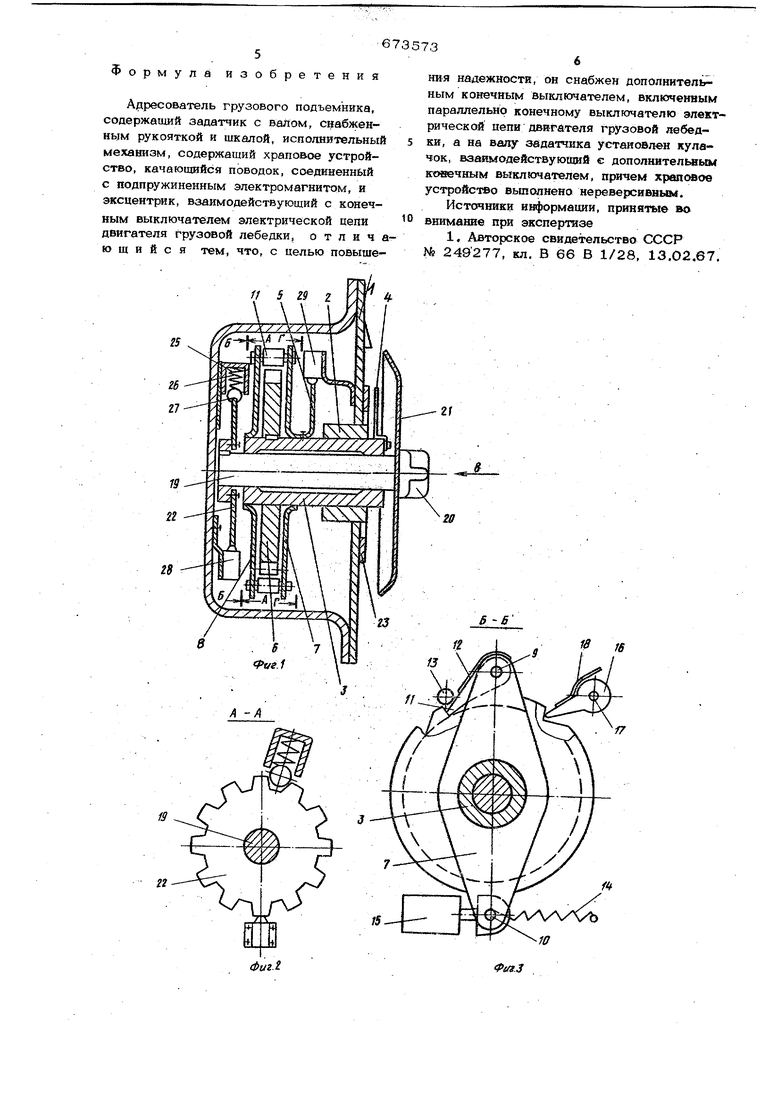
На фиг. 1 изображено описываемое устройство, общий вид; на фиг. 2 - разрез Д-А фиг. 1; на фяг. 3 - разрез Б-Б фиг. 1; на фиг. 4 - вид В на фиг, 1; на фиг. S - разрез Г-Г фяг. 1; на фиг. 6 электросхема включения ксшёчных выклгсьчателей.
АдреСоватеяь грузового подъемника содержит плату 1, на которой смонтирована опора 2. В опоре 2 установлен поль1й вал 3, ka котором жестко укреплены указатель 4, эксцентрик 5 и храповое устройство 6. На, валу 3 свободно одеты щеки 7 и 8, которые охватывают храповое устройство. Шеки 7 и В, образующие поводок, соединены пальцами 9 и 10.. На пальце 9 одета собачка 11, взаимодействующая с храповым ycтpoйcтвo f 6. Собачка 11 прижимается к храповому устройству 6 пружиной 12. Ход собачки 1.1 храпового устройства 6 ограничивается упором 13, установлепным на плате 1. С пальцем 10 взаимодействует пружина 14 и якорь -магнита 15, которые также закреплены на плате 1. Собачка 16 взаимодействует с храповым устройством 6, препятствуя обратному вращению. Ось собачки 17 заделана на плате 1. К храповому устройству 6 собачка 16 прижимается пружиной 18, Внутрь полого вала 3 вставлен вал 19, на котором жестко смонтированы рукоятка 2О, шкала 21 и диск 22 фиксато ра. Шкала 21 изготовлена либо из прозрачного материала, либо имеет отверсти в которые видны указатель 4 и отметки остаиовочных пунктов этажей), нанесенные на неподвижной шкале 23, которая укреплена .на нлате 1. Отметки на шкале 21 нанесены таким образом, что их величина возрастает в направлении движе ния указателя 4, Отметки на шкале 23 нанесены в обратном направлении. На плите 1 установлен неподвижный указатель 24, дающий начало qTC4eTa. Указатель 24 совпадает с отметкой О шкалы 23, Диск фиксатора 22 взаимодей ствует с фиксатором 25, состоящим из пружины 26 и шарика 27, Причем число фиксированных положений равно числу отметок, нанесенных .на шкалах 21 и 23, включая О. Диск фиксатора 22 взаимодействует также с конечным выключателем 28, который дает сигнал перед прохождением каждого фиксированного положения. На плате 1 укреплен конечный вьfключaтeль 29, взаимодействующий с эксцентриком На; подъемника установлены упо ры 30, с которыми взаимодействует конечный выключатель 31, расположенный на грузовой каретке. Работа устройства осуществляется следующим образом. Для направления грузонесущего органа К этаж вверх машинист поворачивает рукоятку 20 вместе со .шкалой 21 и валом 19 в направлении, соответствующем движению храповрго устройства 6 (по ча совой стрелке), так, чтобы против указа теля 24 оказалась отметка К. Диск фик сатора 22, поворачиваясь вмест с валом 19, взаимодействует с конечным вы ключателем 28, который выдает п -к си налов для включения магнита 15, в результате чего храповое устройство 6, ва 3 вместе с указателем 4 и кулачком 5 поворачиваются на п -к шагов ( П - количество шагов, соответствующее полному обороту шкалы 21), Указатель 4 останавливается против отметки О шкалы 21 и И; шкалы 23, Машинист включает привод, грузонесущий орган подъемника движется вверх, конечный вьжлючатель 31, расположенный на нем, взаимодействует с упорШу1И 30, находящимися на мачте, и дает к импульсов для включения магнита 15, Хра- повое устройство 6 вместе с эксцентриком 5 и указателем 4 поворачиваются на к шагов, в результате чего указатель 4 оказывается против указателя 24, а эксцентрик 5 в этот момент взаимодействует с конечным выключателем 29, который дает сигнал на остановку привода подъ- ема. Вращаясь, указатель 4 показывает на шкале 21 положение грузовой каретки . в процессе подъема. Если необходимо направить грузовую каретку с одного этажа на другой вверх, машинист совмещает отметку нужного этажа шкалы 21 с указателем 24, вращая шкалу 21 также по часовой стрелке. Затем машинист включает привод подъема. Вышеописанные действия элементов адресователя повторяются. Для адресования грузонесущего органа вниз, например на i этаж, машинист поворачивает рукоятку 2 О вместе со шка лой 21 и валом 19 против часовой стрелки так, чтобы i деление шкапы 21 совпало с указателем 24. Диск фиксатора 22, поворачиваясь вместе с валом 19, взаимодействует с конечным вьпслючателам 28, который выдает п -( К- i ) сигналов для включения магнита, в результате чего храповое устройство 6, вал 3 вместе с указателем 4 и кулачком 5 поворачиваются на И -( К- i) шагов. Указатель 4 останавливается против п -(К -{ )-6 на шкале 21, При опускании грузовой каретки конечный выключатель 31 взаимодействует с упорами 30, расположенными на мачте, и дает (к-1) импульсов для включения магнита i 5, Храповое колесо 6 вместе с эксцентриком 5 и указателем 4 поворачиваются на (к-i) шагов, после чего указатель 4 оказывается против указателя 24, а кулачок 5 в этот момент взаимодействует с конечным выключателем 29, которььй дает сигнал на остановку привода подъемника.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДРЕСОВАТЕЛЬ ГРУЗОВ ПОДЪЕМНИКОВ';«;дтечтно-тох;-;^чо>& ,..-Ji!?^jiK:bT>&?HmMF:, | 1969 |
|
SU249277A1 |
| Адресователь груза подъемника | 1974 |
|
SU554198A1 |
| АДРЕСОВАТЕЛЬ ГРУЗОВ ПОДЪЕМНИКА | 1969 |
|
SU243799A1 |
| ЛЕСТНИЧНЫЙ ПОДЪЕМНИК | 2019 |
|
RU2703812C1 |
| Адресователь грузов мачтового подъемника | 1975 |
|
SU530838A1 |
| Механизм стопорения грузовой каретки строительного подъемника | 1987 |
|
SU1474063A1 |
| Механизм стопорения грузовой каретки строительного подъемника | 1988 |
|
SU1557045A1 |
| Грузопассажирский строительный подъемник | 1976 |
|
SU618337A1 |
| Прибор для определения сортности коконов | 1955 |
|
SU119399A1 |
| Адресователь подъемника | 1977 |
|
SU656944A1 |
. .-./ р е т е н и я о р м у л а Адресователь грузового подъемника, содержащий задатчик с валом, снабженным рукояткой и шкалой, исполнительны механизм, содержащий храповое устройство, качающийся поводок, соединенный с подпружиненным электромагнитом, и эксцентрик, взаимодействующий с конечным выключателем электрической цепи двигателя грузовой лебедки, отлич ющийся тем, что, с целью повыше ff S Z9 f3 гг
Фиг.
.3 Z ,3 нйя надежности, он снабжен дополнительным конечным выключателем, включенным параллельно конечному выключателю электрической пепн двигателя грузовой лебедки, а на валу эбдатчика установлен кулачок, взаимодействующий с дополнительным конечным выключателем, причем храповое устройство вьшолнено нереверсивньлм. Источники информации, принятые во внимание при экспертизе 1, Авторское свидетельство СССР № 249277, кл. В 66 В 1/28, 13,02,67.
Zf
вид В
