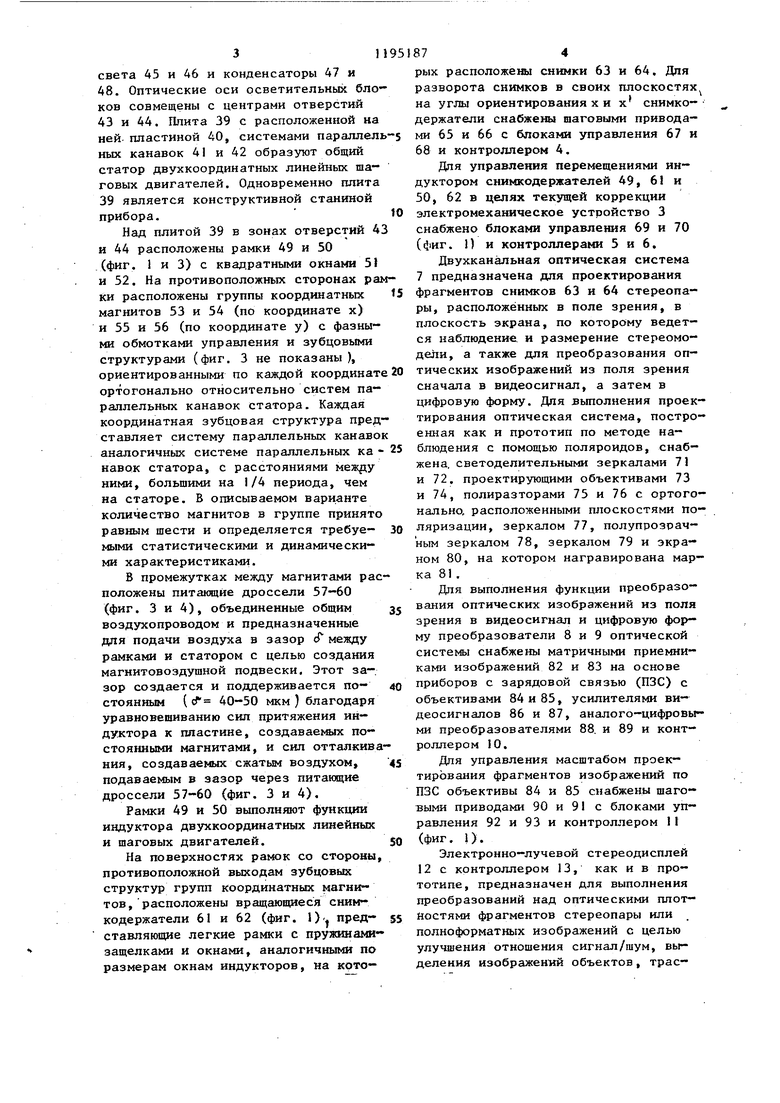
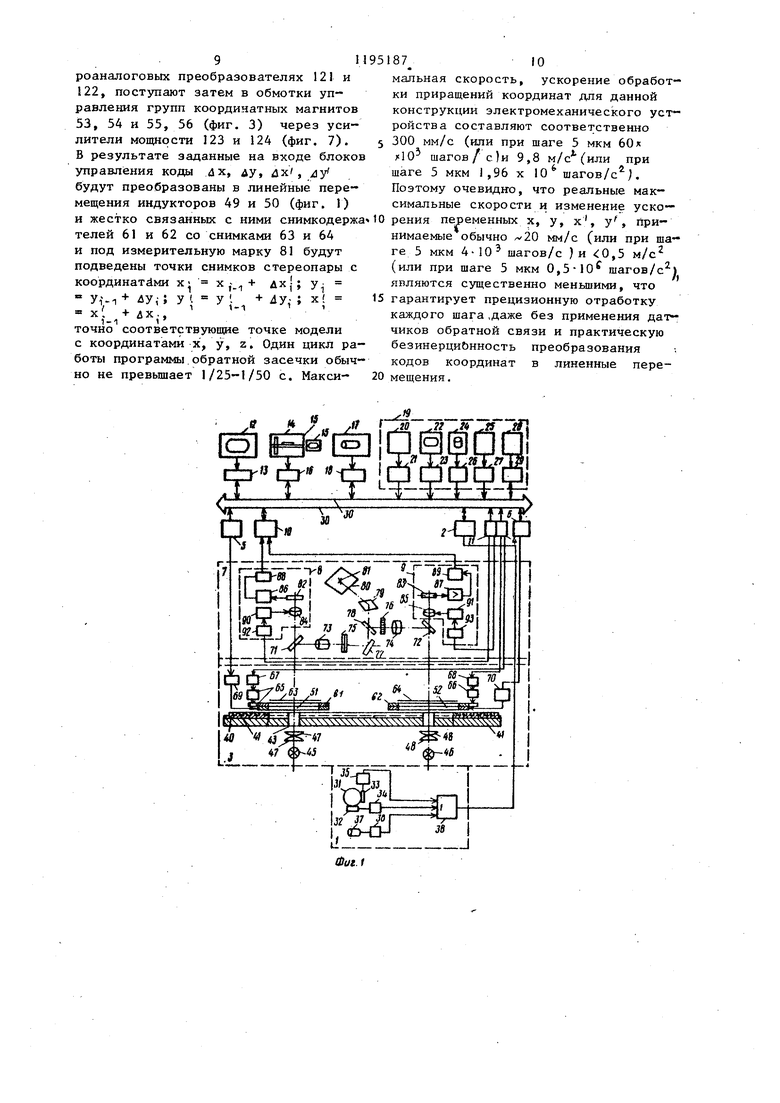
1 ИзоОретение относится к фотограмметрическому приборостроению, в част ности к классу аналитических стереообрабатывающих приборов. Целью изобретения является повы- шение быстродействия и точности об- работки за счет увеличения жесткости конструкции прибора, На фиг, 1 изображена структурная схема предпагаемого аналитического стереофотограмметрического прибора; на фиг, 2 - структурная схема общего статора электромеханического устройства; на фиг. 3 структурная схема рамочного индуктора с группами маг- нитон и дросселями; на фиг, i - пи- танлций дроссель; на фиг, 5 - схема типового контроллера; на фиг. 6 - упрощенная схема линейного шагового двигателя (ЛШД-); на фиг, 7 - структурная схема блока управления индук- торами-снимкодержателями электромеханического устройства. Прибор представляет собой модульную структуру, которая содержит ряд модулей, сопрягаемых с ЭВМ по интерфейсу ввода-вывода, В состав прибора (фиг, I) входят задатчик 1 координат х, у, z точек модели (карты) с контроллером 2, электромеханическое устройство 3 перемещения снимков на плоскости и их разворота на углы х и х , с осветительной схемой, контроллером шаговых двигателей 4 и контроллерами ЛШД 5 и 6, двухканальная .оптическая система 7 с преобразователями 8 и 9 фрагментов оптических изображений, находящи ся в поле зрения стереоприбора, в цифровые массив:,, контроллером 10 преобразователей и контроллером 11 шаговых двигателей управления масшта бом проектирования на приборы с зарядовой связью, стереодисплей 12 с контроллером 13, графопостроитель 14 с замкнутой телевизионной системой 15 и контроллером 16, устройство ввода-вывода изображений 17 с контро лером 18, электронно-вычислительная машина 19, включающая процессор 20 с контроллером 21, пультовый терминал 22 с контроллером 23, внешние запоминающие устройства на магнитных дис ках 24 и магнитных лентах 25 с контроллерами 26 и 27, устройства ввода вывода 28 перфокарточные, перфоленто ньк и печати с контроллером 29 и инTop.iieiic: ЭВМ Ю. 87 .J Входящие в состав прибора модули имеют следующее назначение и состав. Задатчик 1 координат точек модели (карты) предназначен для формирования на вход ЭВМ координат точек х и у, z, соответствующих координатам наблюдаемой по модели точке. Задатчик представляет шар 31 с двумя ортогонально расположенными и фрикционно соединенными с шаром валами 32 и 33, на которых закреплены преобразователи 34 и 35 угла поворота в число-импульсный код. с помощью преобразователей 34 и 35 формируются приращения 4х, л у. Дпя формирования приращений 4 z. за- датчик снабжен угловым преобразователем число-импульсного типа 36 с .ручным приводом в виде цилиндра 37, Для объединения информации с целью передачи .в канал ЭВМ через контроллер 2 и интерфейс 30 задатчик.. снабжен мультиплексором 38, Электронная вычислительная машина 19 предназначена для определения элементов взаимного ориентирования снимков, внешнего ориентирования модели, вычисления двойной обратной фотограмметрической засечки, выдачи управляющих воздействий на входы управления двухкоординатными линейными шаговыми двигателями электромеханического устройства 3, Электромеханическое устройство 3 предназначено для программного перемещения изображений стереопары под управлением ЭВМ с целью осуществления в реальном масштабе времени текущих коррекций в координаты.точек на снимках стереопары, соответствующих точке, модели, т.е. для подведения под измерительную марку точгк снимков, соответствующих точке модели. Для выполнения этих функций электромеханическое устройство выполнено в виде плиты 39, на которой жестко закреплена пластина 40 из ферромагнитного материала. На пластине 40 нанесены две взаимно перпендикулярные системтл параллельных канавок 41 и 42 (фиг, I и 2), заполненные немагнитным составом и образующие систему координат прибора, В плите и пластине выполнено два сквозных отверстия 43.и 44 (фиг. 1 и 2 }, под плитой рас17оложеиы осветитель ные блики, содержацпе источники
31
света 45 и 46 и конденсаторы 47 и 48. Оптические оси осветительных блоков совмещены с центрами отверстий 43 и 44. Плита 39 с расположенной на ней пластиной 40, системами параллель ных канавок 41 и 42 образуют общий статор двухкоординатных линейных шаговых двигателей. Одновременно плита 39 является конструктивной станиной прибора.
Над плитой 39 в зонах отверстий 43 и 44 расположены рамки 49 и 50 (фиг. 1 и 3) с квад.ратными окнами 51 и 52. На противоположных сторонах рамки расположены группы координатных магнитов 53 и 54 (по координате х) и 55 и 56 (по координате у) с фазными обмотками управления и зубцовыми структурами (фиг. 3 не показаны ), ориентированными по каждой координате ортогонально относительно систем параллельных канавок статора. Каждая координатная зубцовая структура представляет систему параллельных канавок аналогичных системе параллельных ка навок статора, с расстояниями ними, большими на 1/4 периода, чем на статоре. В описываемом варианте количество магнитов в группе принято равным шести и определяется требуемыми статистическими и динамическими характеристиками.
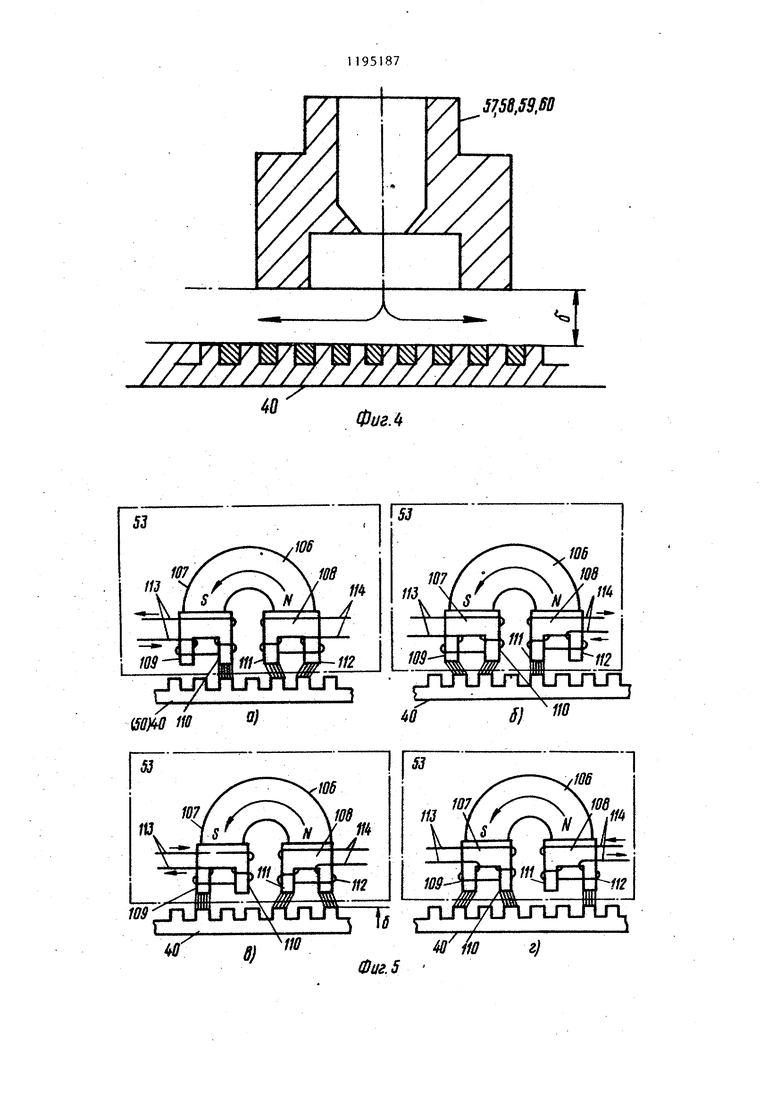
В промежутках между магнитами расположены питающие дроссели 57-60 (фиг. 3 и 4), объединенные общим воздухопроводом и предназначенные для подачи воздуха в зазор сГ между рамками и статором с целью создания магнитовоздушной подвески. Этот зазор создается и поддерживается по- стоянным ( 40-50 мкм) благодаря уравновешиванию сил притяжения индуктора к пластине, создавае1. постоянными магнитами, и сил отталкивания, создаваемых сжатым воздухом, подаваемым в зазор через питающие дроссели 57-60 (фиг. 3 и 4),
Рамки 49 и 50 выполняют функции индуктора двухкоординатных линейных и шаговых двигателей.
На поверхностях рамок со стороны, противоположной выходам зубцовьк структур групп координатных магнитов, расположены вращающиеся сним кодержатели 61 и 62 (фиг. 1) представляющие легкие рамки с пружинами- защелками и окнами, аналогичными по размерам окнам индукторов, на кото-
J874
рых расположены снимки 63 и 64, Для разворота снимков в своих плоскостях на углы ориентирования X и х снимкодержатели снабжены шаговыми приводами 65 и 66 с блоками управления 67 и 68 и контроллером 4.
Для управления перемещениями индуктором снимкодержателей 49, 61 и 50, 62 в целях текущей коррекции электромеханическое устройство 3 снабжено блоками управления 69 и 70 (фиг. 1) и контроллерами 5 и 6.
Двухкаиальная оптическая система 7 предназначена для проектирования фрагментов снимков 63 и 64 стереопары, расположённьк в поле зрения, в плоскость экрана, по которому ведется наблюдение и размерение стереомо- дели, а также для преобразования оптических изображений из поля зрения сначала в видеосигнал, а затем в цифровую форму. Для вьшолнения проектирования оптическая система, построенная как и прототип по методе наблюдения с помощью поляроидов, снабжена, светоделительными зеркалами 71 и 72. проектирующими объективами 73 и 74, полиразторами 75 и 76 с ортогонально, расположенными плоскостями поляризации, зеркалом 77, полупрозрачным зеркалом 78, зеркалом 79 и экраном 80, на котором награвирована марка 81 .
Для выполнения функции преобразования оптических изображений из поля зрения в видеосигнал и цифровую форму преобразователи 8 и 9 оптической системы снабжены матричными приемииками изображений 82 и 83 на основе приборов с зарядовой связью (ПЗС) с объективами 84 и 85, усилителями видеосигналов 86 и 87, аналого-цифровыми преобразователями 88. и 89 и контроллером 10,
Для управления масштабом проектирования фрагментов изображений по ПЗС объективы 84 и 85 снабжены шаговыми приводами 90 и 91 с блоками управления 92 и 93 и контроллером 1I (фиг. 1),
Электронно-лучевой стереодисплей 12 с контроллером 13, как и в прототипе, предназначен для выполнения преобразований над оптическими плот- йостями фрагментов стереопары или полноформатных изображений с целью улучшения отношения сигнал/шум, выделения изображений объектов, трас-
$1
си рЬвания, нанесения конечных результатов дешифрирования непосредственно на изображение, внесения исправлений, и т.п., а также для стереоскопического наблюдения преобразованных по оптическим плотностям изображений стереопары. Электррнно-лучевой стереодисплей может функционировать под управлением ЭВМ как с видеоинформацией, из зоны поля зрения оптической систе- мы, так и с информацией, получаемой при вводе изображений от устройства ввода-вывода изображений.
Графопостроитель J4 с замкнутой телевизионной системой 15 и контрол- лером 16, как и в прототипе, предназначен для отображения результатов картографирования и дешифрирования в графической форме.
Предлагаемый прибор строится по модульному принципу и каждый входящий в его структуру модуль содержит контроллер, который имеет средства стандартного сопряжения с ЭВМ. В описываемом варианте прибора приме- няется ЭВМ из семейства СМ ЭВМ с интерфейсом Общая шина согласно ОСТ 25-795-78. Типовой контроллер, приводимый ниже для иллюстрации принципа действия, содержит (фиг. 5) де- шифратор адреса 94, управления прерыванием 95, передатчики информации на Общую шину 96, приемники информации с Общей шины 97, регистр команд-состояний ввода 98, ре- гистр команд-состояний вывода 99, регистр данных ввода 100, регистр данных вывода 101, приемники внешнего устройства 102, передатчики внешнего устройства 103, схему управления вводом 104, схему управления выводом 105. Контроллеры конкретных устройств прибора строятся аналогично, но непринципиально отличаются количеством регистров, количеством разрядов шин адреса, отводимых под их адресацию соответственно количеству разрядов дешифратора адреса.
Прибор, как и прототип, может ос- нап(аться датчиками обратной связи, например лазерными измерителями перемещений.
Прежде чем описывать работу прибора, целесообразно рассмотреть принцип управления снимкодержателями - индукторами 49, 61 и 50, 62 (фиг. 1).
В конструкции электромеханического устройства 3 (фиг. 1, 3), содержащего
876
плнту 39 с пластиной 40, сис1- -.ми параллельных канавок 41 и 42, отверстиями 43 и 44 и рамки 49 и 50 с окнами 51 и 52, магнитами 53-56, дросселями 57-60 и размещенными на рамках вращающимися снимкодержателям 61 и 62, реализован принцип, лежащий основе работы линейного шагового двигателя. Поэтому взаимодействие между рамками и плитой с пластиной может быть пояснено на основе принципа работы линейного шагового двигателя.
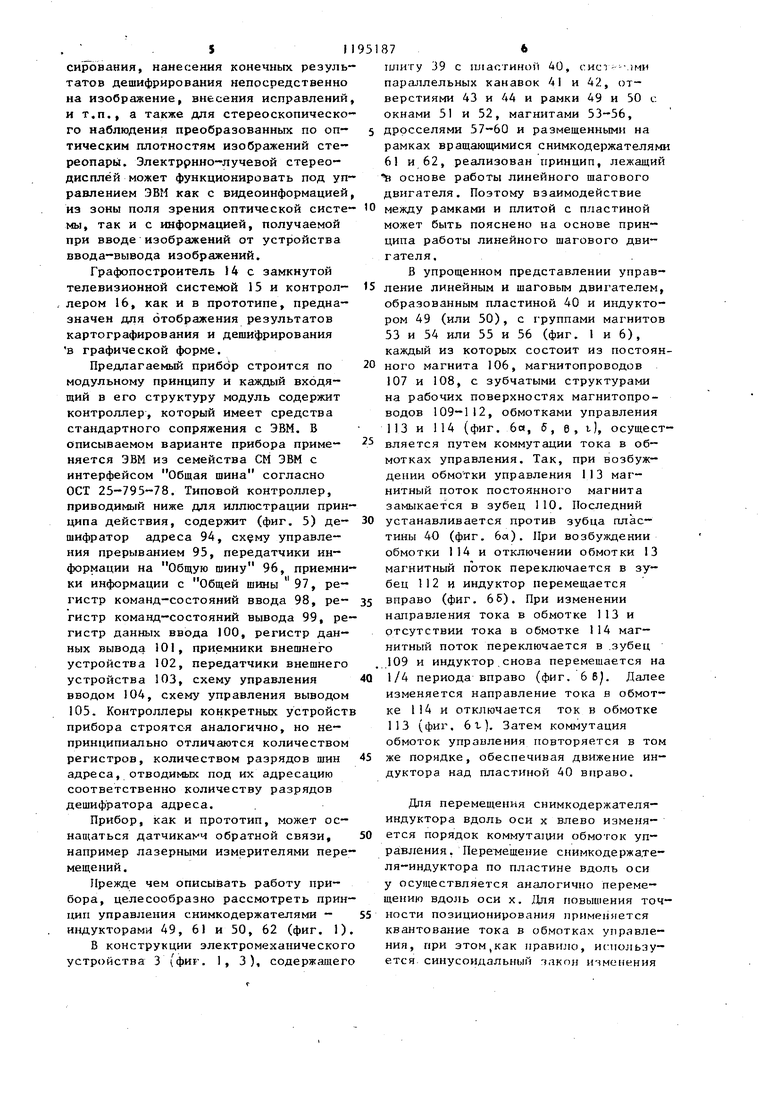
В упрощенном представлении управление линейным и шаговым двихателем, образованным пластиной 40 и индуктором 49 (или 50), с группами магнитов 53 и 54 или 55 и 56 (фиг. 1 и 6), каждый из которых состоит из постоянного магнита 106, магнитопроводов 107 и 108, с зубчатыми структурами на рабочих поверхностях магнитопроводов 109-112, обмотками управления 113 и 114 (фиг. 6а, 5, е , t), осуществляется путём коммутации тока в обмотках управления. Так, при возбуждении обмотки управления 113 магнитный поток постоянного магнита замыкается в зубец 110. Последний устанавливается против зубца пшас- тины 40 (фиг. 6а). При возбуждении обмотки 114 и отключении обмотки 13 магнитный поток переключается в зубец 112 и индуктор перемещается вправо (фиг. 65). При изменении направления тока в обмотке 113 и отсутствии тока в обмотке 114 магнитный поток переключается в .зубец 109 и индуктор снова перемешается на 1/4 периода вправо (фиг. 66. Далее изменяется направление тока в обмотке 114 и отключается ток в обмотке 113 (фиг. 61). Затем коммутация обмоток управления повторяется в том же порядке, обеспечивая движение индуктора над пластиной АО вправо.
Для перемещения снимкодержателя- индуктора вдоль оси х влево изменяется порядок коммутатши обмоток управления. Пере {ещение сиимкодержателя-индуктора по пластине вдоль оси у осуществляется аналогично перемещению вдоль оси X. Для повышения точности позиционирования применяется квантование тока в обмотках управления, при этом,как правило, используется синусоидальный ичмемения
- / 71
тока, а также увеличивается число обмоток управления до четырех.
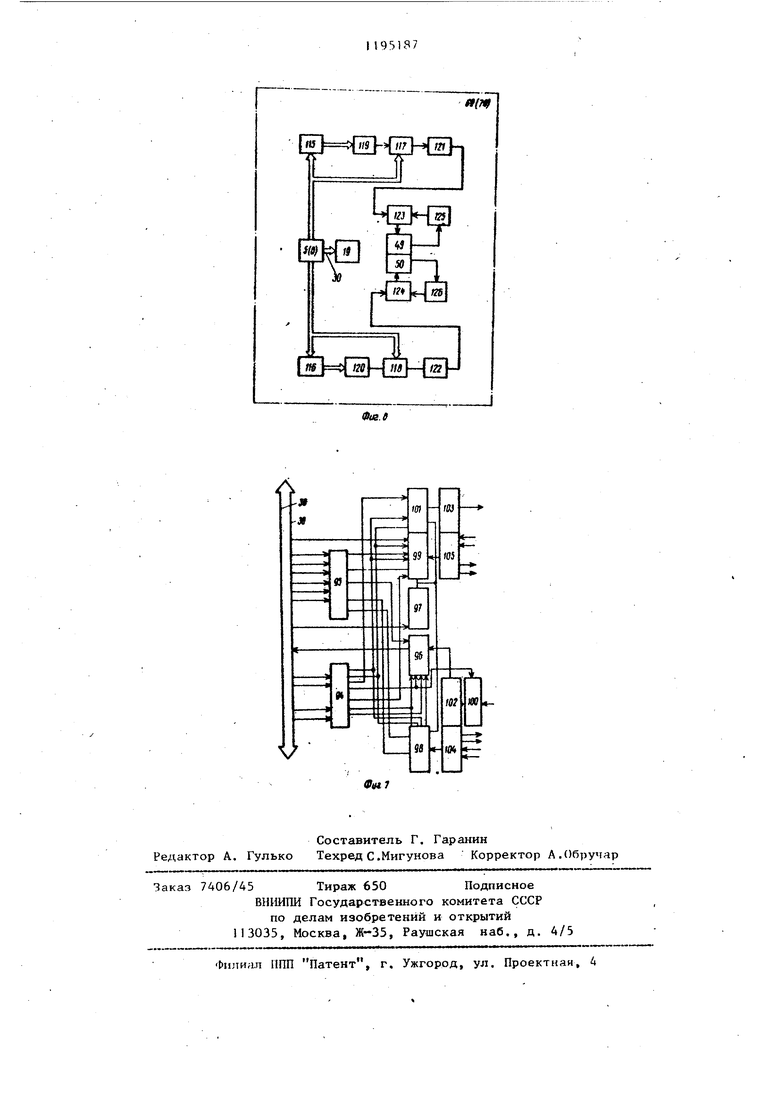
Указанные коммутации обмоток в каждом ивдукторе 49 и 50 осуществляют идентичные блоки управления 69 и 70 (фиг. 1). Каждый из блоков управления 69 и 70 состоит из двух идентичных субблоков, служащих для управления по координатам х и у, и содержит (фиг. 7) микропроцессоры 11 и 116, генераторы щаговых импульсов 117 и 118 с блоками сопряжения с мик .ропроцессорами 119 и 120, цифроаналоговые преобразователи 121 и 122, усилители мощности 123 и 124, сигнал с вькодов которых поступают в обмотки управления групп магнитов 53-56 (фиг. 3) индукторов-снимкодержателей 49 и 50 (фиг. 1) и демпферы 125 и 126.
Для управления разворотами сним- кодержателей на углы х и х , последние снабжены приводами 65 и 66 (фиг. 1) на шаговых прецизионных двигателях серии .
В блоках управления 67 и 68 (фиг. 1) этими пpивoдa И с целью повьш1ения точности разворота также применяется квантование тока в обмотках управления и синусоидальный за- кон изменения тока. Блоки управления этими приводами аналогичш 1 блокам управления, схема которых приведена на фиг. 7, ибо работа щаговых двигателей серии ЩШП основана на том же принципе, что и-работа линейного шагового двигателя.
Предлагаемый прибор функционирует в ряде режимов (взаимное ориентирование снимков, внешнее ориентирование модели, измерение пространственных координат точек модели и картирование, фотометрические преобразования изображений стереопары при дешифрировании и др.). В связи с тем, что новизна предлагаемого прибора заключена в конструкции основного модуля, электромеханического устройства 3, из всех режимов функционирования здесь необходимо рассмотреть режим измерения пространственных координат точек модели, в предположении, что взаимное ориентирование снимков и внешнее ориентирование модели вьшолнеиы, что матрицы внешнего ориенти- рования введены в прогрумну двойной обратной фотографической засечки, а снимки в снимкодержателях развернуты
878
на углы X и х с помощью шаговых приводов 65 и 66 (фиг. 1). Тогда при измерении прибор функционирует следующим образом. Оператор в поляроидньгх очках-анализаторах, плоскости поляризации которых расположены также как у поляризаторов 75 и 76 (фиг. 1 ) с помощью шага и цилиндра задатчика координат 1 осуществляет наведение на точку стереомодели, совмещая измерительную марку 81, нанесенную на экран 80. Импульсы приращений с выходов преобразователей 34, 35 и 36, вызывая прерывание в системе через мультиплексор 38 и контроллер 2 передаются в ЭВМ 19. Цри этом управление по установленному для задатчика вектору прерывания передается программе двойной обратной фотограмметрической засечки, в результате работы которой через контроллер 2 сначала будут переданы приращения 4X, ЛУ, dz точек стереомодели и суммированы в. ячейках х), ;у7, z текущие значения координат точки х, у и Z, а затем по окончании циклд программы засечки на входы контроллеров 5 и 6 (фиг. 1 и 7} будут переданы приращения координат точек
ДХ: Х- - х..,; ЛУ У; - У.) лх; х; - х(.; Ау у1 - у где i - номер цикла, соответственно левого и правого снимков. С выходов контроллеров 5 и 6 эти коды приращений координат вместе со с:воими знаками затем поступают на микропроцессоры 115 и 116 (фиг. 7), в которых предварительно суммирована вся исходная информация (скорость о-.работки, ускорение отработки и др.), необходимая для работы блоков управления. Исходная информация и коды приращений координат X, у, х , у через блоки сопряжения 119 и 120, затем поступают на вход генератсэров шаговых импульсов 117 и 118, где коды координат преобразуются в последовательности унитарных импульсов и дополнительно в цифроаналоговых преобразователях 121 и 122 квантуются для повышения точности отработки шага. Операция квантования токов управления представляет электрическое дробление шага, принцип работы которого известен.
Квантованные последовательности токов управления, формированные в циф9n
роаналоговых преобразователях 121 и 122, поступают затем в обмотки управления групп координатных магнитов 53, 54 и 55, 56 (фиг. 3) через усилители мощности 123 и 124 (фиг. 7). В результате заданные на входе блоков управления коды л х, ду, х/, у будут преобразованы в линейные перемещения индукторов 49 и 50 (фиг. 1) и жестко связанньк с ними снимкодержателей 61 и 62 со снимками 63 и 64 и под измерительную марку 81 будут подведены точки снимков стереопары с координатами к
1-1 +
ДХ
УТ
+ лу,; у . у ;. + 4у.-; х( .
точно соответствуюпще точке модели с координатами х, у, z. Один цикл работы программы обратной засечки обычно не превышает 1/25-1/50 с. Макси95187 10
мальная скорость, ускорение обработки приращений координат для данной конструкции электромеханического устройства составляют соответственно 5 300 мм/с (или при шаге 5 мкм 60х г10 шагов/ с)и 9,8 м/с (или при шаге 5 мкм 1,96 х 10 шагов/с ;. Поэтому очевидно, что реальные максимальные скорости и изменение уско-
.10 рения переменных X, у, х , у , принимаемые обычно 20 мм/с (или при шаге 5 мкм 4-10 шагов/с J и 0,5 м/с (или при шаге 5 мкм 0,5-10 шагов/с являются существенно меныиими, что
15 гарантирует прецизионную отработку каждого шага ,даже без применения датчиков обратной связи и практическую безинерциЬнность преобразования кодов координат в линенные перемещения.
jff44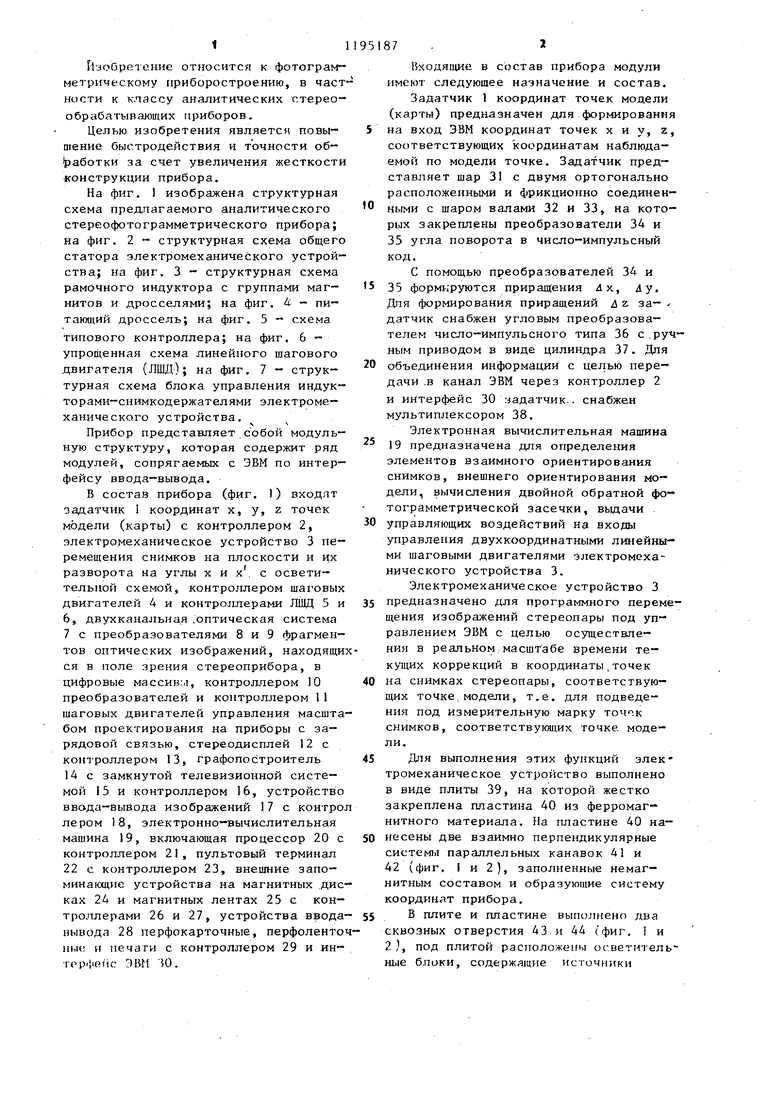
| название | год | авторы | номер документа |
|---|---|---|---|
| Аналитический стереофотограмметрический прибор | 1980 |
|
SU932232A1 |
| Универсальный стереофотограмметрический прибор | 1989 |
|
SU1673832A1 |
| Устройство для перемещения снимкодержателей фотограмметрического прибора | 1985 |
|
SU1323533A1 |
| ОРТОТРАНСФОРМАТОР | 1970 |
|
SU284324A1 |
| АНАЛИТИЧЕСКИЙ ФОТОКАРТОГРАФ ДЛЯ СОСТАВЛЕНИЯ ФОТОКАРТ ПО СТЕРЕОСКОПИЧЕСКИМ СНИМКАМ | 1970 |
|
SU285256A1 |
| Устройство для центрировки линз | 1986 |
|
SU1365016A1 |
| УНИВЕРСАЛЬНЫЙ СТЕРЕОФОТОГРАМ.МЕТРИЧЕСКИЙ ПРИБОР АНАЛИТИЧЕСКОГО ТИПА | 1969 |
|
SU250471A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИЗМЕНЕНИЯ ПОЛОЖЕНИЯ ТОЧЕК ОБЪЕКТА | 1991 |
|
RU2012853C1 |
| АНАЛИТИЧЕСКИЙ СТЕРЕОФОТОГРАММЕТРИЧЕСКИЙ ПРИБОР | 1993 |
|
RU2098758C1 |
| Дентальный панорамный рентгенографический аппарат | 1984 |
|
SU1258382A1 |

АНАЛИТИЧЕСКИЙ СТЕРЕОФОТОГРАММЕТРИЧЕСКИЙ ПРИБОР, содержащий задатчик координат точек стереомоде- ли, электромеханическое устройство для линейного и углового перемещения снимкодержателей в одной плоскости, снабженной плитой не менее чем с двумя взаимно перпендикулярными систе мами параллельных канавок, образующих статоры двухкоординатных шаговых двигателей, над которыми расположены индукторы с группами магнитов, . установленные с возможностью перемещения относительно статоров, двух- канальную оптическую наблюдательную систему с встроенными матричными приемниками изображений, злектронную вычислительную машину и графопостроитель, отличающийся тем, что, с целью повышения быстродействия и точности обработки путем увеличения жесткости конструкции . прибора, каждый статор плиты электромеханического устройства снабжен отверстиями, под которыми расположены осветители оптической наблюдательной (Л системы, оптические оси которых совмещень с центрами отверстий, индукс торы выполнены в виде рамок с окнами, на {соторых закреплены с возможностью поворота снимкодержатели, а группы магнитов расположены на сторонах рамок. со сд 00 
4/ I I А„
.
3S
В
„Л,
И
Ж
Фиг. 2
f- Г1 п п г т
- I II И lof 1 I I И о
LJLJ LJ LJ LJ U
S7
jsfL
- 1
1
i
п п ГТ П Г1 Пgg
оМ I и Ы 1 I I I аLJ- LJ LJ LJ LJ
1
о
Ф1/г.9
40
S75S,59.BQ
Фиг Л
т
/
8)
W 110 г)
Фаг. 5
| СПОСОБ ПОЛУЧЕНИЯ ТОПИНАМБУРНО-ПЕРСИКОВОГО НАПИТКА | 2008 |
|
RU2370050C1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аналитический стереофотограмметрический прибор | 1980 |
|
SU932232A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
