Изобретение относится к сельскохозяйственному машиностроению и может быть использовано в машинах и механизмах для уборки трав.
Цель изобретения - повышение надежности работы режуш,его аппарата путем снижения динамических нагрузок.
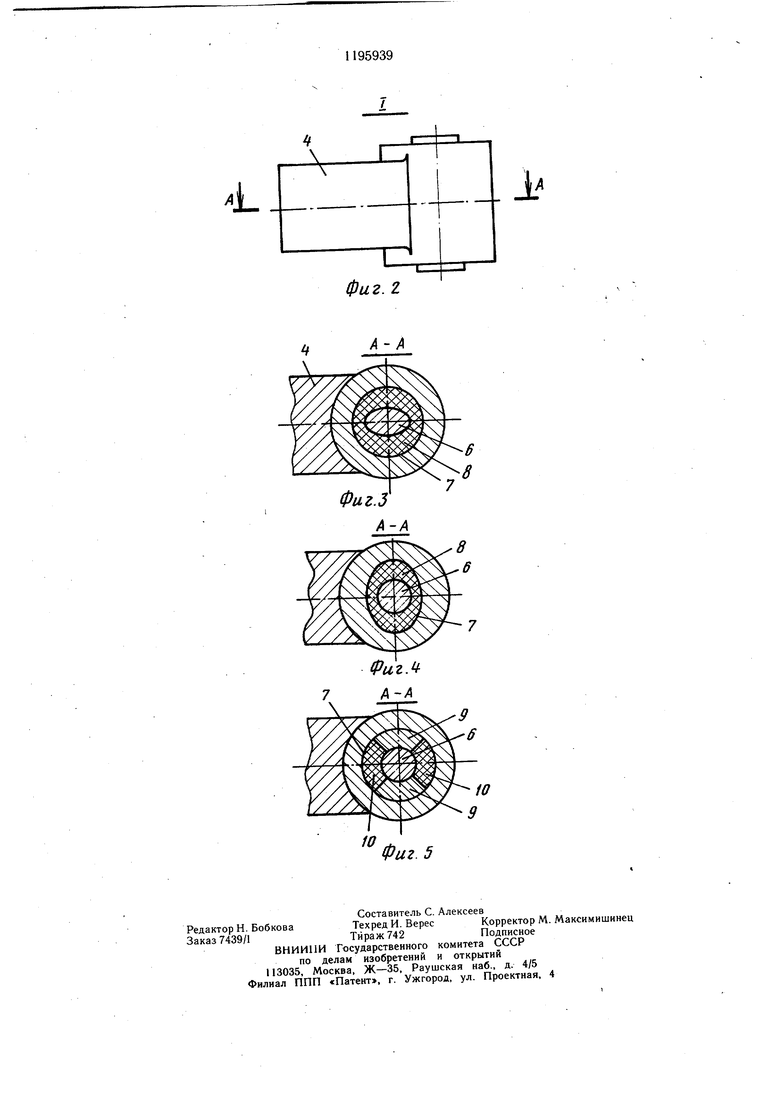
На фиг.1 изображена .кинематическая схема механизма привода режущего аппарата; на фиг.2 - узел I на фиг.1; на фиг.З - сечение А-А на фиг.2, первый вариант; на фиг. 4 - то же, второй вавариант; на фиг. 5 - то же,третий вариант. Механизм привода режушего аппарата по первому варианту содержит механизм «качающаяся шайба 1, кинематически связанный с рычагом 2, который верхним концом акреплен в шарнире 3, а нижним соединен с ножом 4 посредством шарнира 5 (фиг. 1). Последний содержит эллиптический алец 6, взаимодействующий с гнездом 7 ножа через упругий элемент 8, выполненный в виде втулки (фиг.З), причем большая ось пальца ориентирована в направении движения ножа.
Механизм привода режущего аппарата по второму варианту содержит механизм «качающаяся шайба 1, кинематически связанный с рычагом 2, который верхним кондом закреплен в шарнире 3, а нижним соединен с ножом 4 посредством шарнира 5 (фиг.1). Последний содержит палец 6, который взаимодействует с гнездом 7 ножа через упругий элемент 8, причем гнездо 7 ножа и упругий элемент выполнены эллиптическими, и ориентированы таким образом, что малая ось эллипса находится по направлению движения ножа (фиг.4).
Механизм привода режущего аппарата по третьему варианту содержит механизм «качающаяся шайба 1, кинематически связанный с рычагом 2, который верхним концом закреплен в шарнире 3, а нижним соединен с ножом 4 посредством шарнира 5 (фиг.1). Последний, содержит палец б, который взаимодействует с гнездом 7 ножа через упругий элемент 8, состоящий из чередующихся участков 9 и 10 разной жесткости, расположенных во взаимноперпендикулярных направлениях, причем участки 9 с большей жесткостью ориентированы по направлению движения ножа (фиг. 5).
Механизм привода режущего аппарата работает следующим образом.
Механизм «качающаяся шайба 1 (первый вариант), кинематически связанный с рычагом 2, преобразует вращательное движение ведущего звена в возвратно-поступательное движение ножа 4. При этом рычаг 2 качается относительно шарнира 3 и отклоняется на угол а, а гнездо 7 ножа в результате описывания круговой дуги вокруг этого шарнира отклоняется на величину h по сравнению с ее положением, соответствующем нейтральному положению рычага 2. Благодаря наличию в шарнире 5 упругого элемента 8, обладающего меньщей жесткостью в плоскости, перпендикулярной движению ножа 4, выбор зазора h происходит за счет этого элемента и гнездо 7 ножа соверщает движение по прямой, тем самым
обеспечивая перемещение ножа без его деформации.
Динамические нагрузки, возникающие при этом в приводе и действующие в плоскости движения ножа, воспринимаются этим же упругим элементом 8 со стороны его
большей жесткости.
Механизм «качающаяся шайба 1, второй вариант, кинематически связанный с рычагом 2, преобразует вращательное движение ведущего звена в возвратно-поступательное
Q движение ножа 4. При этом рычаг 2 качается относительно шарнира 3 и отклоняется на угол об, а гнездо 7 ножа в результате описывания круговой дуги вокруг этого щарнира отклоняется, на величину h по стравнению с ее положением, соответствующем
5 нейтральному положению рычага 2. Благодаря тому, что внешняя поверхность упругого элемента и гнездо 7 ножа выполнены эллиптическими, причем малая ось эллипса ориентирована в плоскости движения ножа, в этом направлении упругий элемент 8 об ладает большей жесткостью и воспринимает динамические кагрузки. Выбор зазора h происходит за счет этого же упругого элемента, за счет наличия жесткости его в плоскости, перпендикулярной плоскости движения ножа, и гнездо 7 ножа соверщает движение
по прямой, тем самым обеспечивая перемещение ножа без деформации.
Механизм «качающаяся щайба (третий вариант), кинематически связанньш с рычагом 2, преобразует вращательное движение
0 ведущего звена в возвратно-поступательное движение ножа 4. При этом рычаг 2 качается относительно шарнира 3 и отклоняется на угол а, а гнездо 7 ножа в результате описывания круговой дуги вокруг этого шарнира отклоняется на величину /г. по сравнению с ее положением, соответствующем нейтральному положению рычага 2. Наличие в составном упругом элементе чередующихся участков 9 меньщей жесткости в плоскости, перпендикулярной плоскости движения ножа 4, позволяет компенсировать зазор h, и гнездо 7 соверщает движение по прямой, тем самым обеспечивая перемещение ножа без его деформации.
Динамические нагрузки воспринимаются участками 10 большей жесткости упругого
5 элемента 8.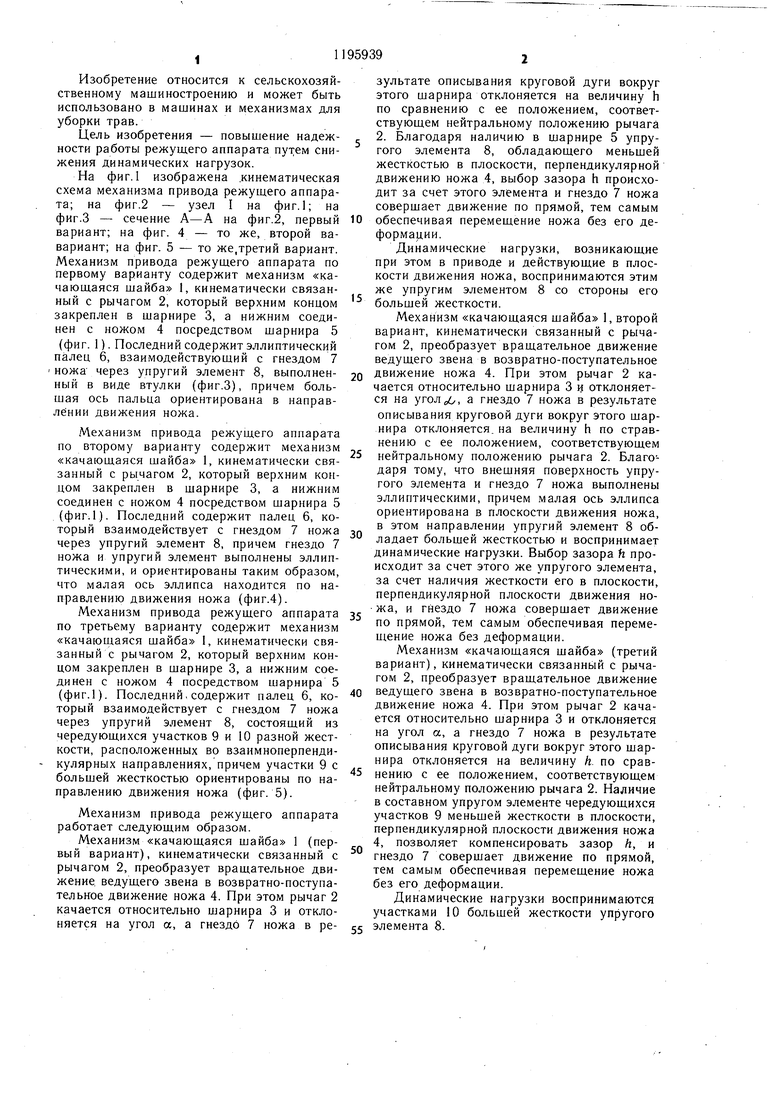
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод режущего аппарата уборочной машины | 1983 |
|
SU1130238A1 |
| Привод режущего аппарата | 1990 |
|
SU1762788A1 |
| Ротационный режущий аппарат | 1988 |
|
SU1644778A1 |
| Привод ножа режущего аппарата | 1990 |
|
SU1794366A1 |
| Механизм привода режущего аппарата | 1986 |
|
SU1429971A1 |
| Привод режущего аппарата | 1990 |
|
SU1797778A1 |
| Устройство для обработки плоских стекол | 1986 |
|
SU1325024A1 |
| Привод двухножевого режущего ап-пАРАТА СЕльСКОХОзяйСТВЕННОй MA-шиНы | 1979 |
|
SU801786A1 |
| Устройство для обработки деталей сложной формы | 1978 |
|
SU742038A1 |
| Механизм привода ножа режущего аппарата сельскохозяйственных машин | 1990 |
|
SU1757515A1 |
1. Механизм привода режуш,его аппарата, содержащий механизм «качающаяся шайба, кинематически связанный с рычагом, который соединен с ножом посредством шарнира, имеющего палец, взаимосвязанный с гнездом ножа через упругий элемент, отличающийся тем, что, с целью повышения надежности работы режущего аппарата путем снижения динамических нагрузок, палец шарнира выполнен эллиптическим, причём большая ось эллипса ориентирована по направлению движения ножа. 2.Механизм привода режущего аппарата, содержащий механизм «качающаяся шайба, кинематически связанный с рычагом, который соединен с ножом посредством шарнира, имеющего палец, взаимосвязанный с гнездом ножа через упругий элемент, отличающийся тем, что, с цел,ью повышения надежности работы путем снижения динамических нагрузок, внешняя поверхность упругого элемента и гнездо ножа выполнены эллиптическими, причем малая ось эллипса ориентирована по направлению движения ножа. 3.Механизм привода режущего аппарата, содержащий механизм, «качающаяся щайба, кинематически связанный с рычагом, который соединен с ножом посредством щарнира, имеющего палец, взаимосвязанный с (Л гнездом ножа через упругий элемент, отличающийся тем, что, с целью повышения надежности работы путем снижения динамических нагрузок, упругий элемент выполнен составным, из участков разной жесткости, расположенных во взаимноперпендикулярных направлениях, причем участки большей жесткости ориентированы по направлению движения ножа. со СП со со со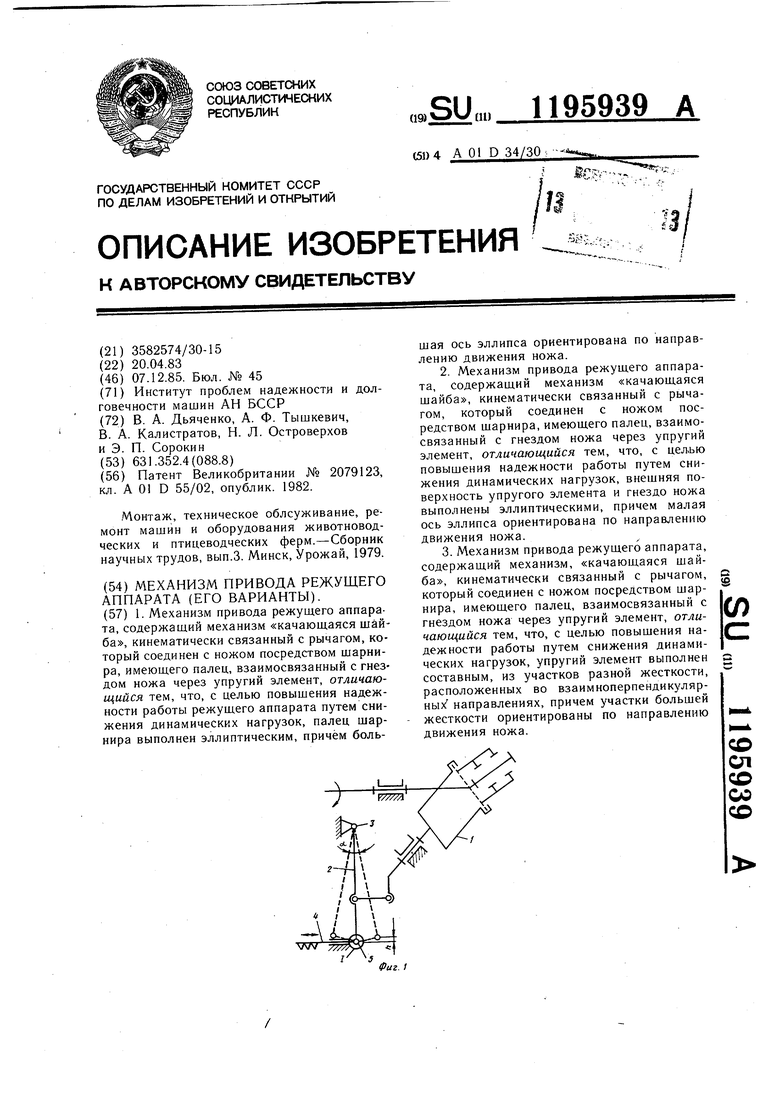
| АКУСТИКО-СТРОБОСКОПИЧЕСКОЕ УСТРОЙСТВО | 1994 |
|
RU2079123C1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для видения на расстоянии | 1915 |
|
SU1982A1 |
| .онтаж, техническое облсуживание, ремонт машин и оборудования животноводческих и птицеводческих ферм.-Сборник научных трудов, вып.З | |||
| Минск, Урожай, 1979. | |||
