Изобретение относится к автоматизации производственных процессов и может быть использовано в различных системах управления перемещением объекта5 например в системах управления перемещением подвижных элементов промышленных роботов и вспомогательного оборудования работотехнических комплексов, а также в системах управления перемещением кислородной фурмы в конвертерах.
Цель изобретения - повьшение быстродействия устройства за счет сокращения времени выбора направления и скорости перемещения объекта.
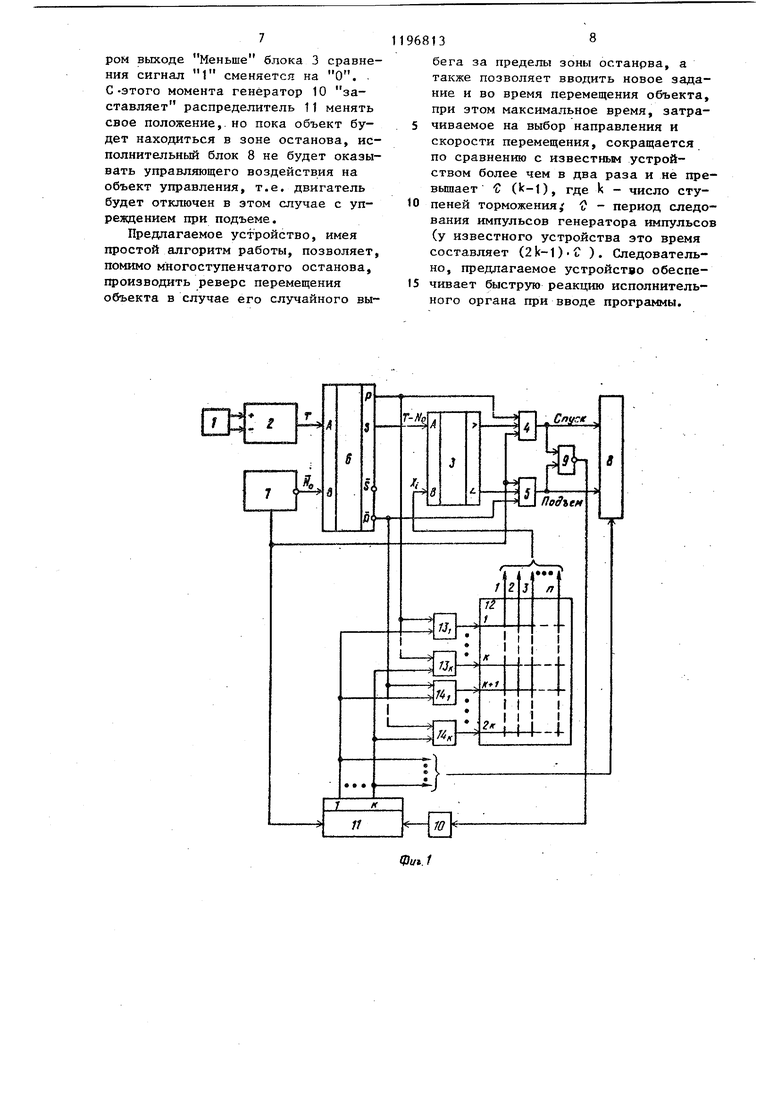
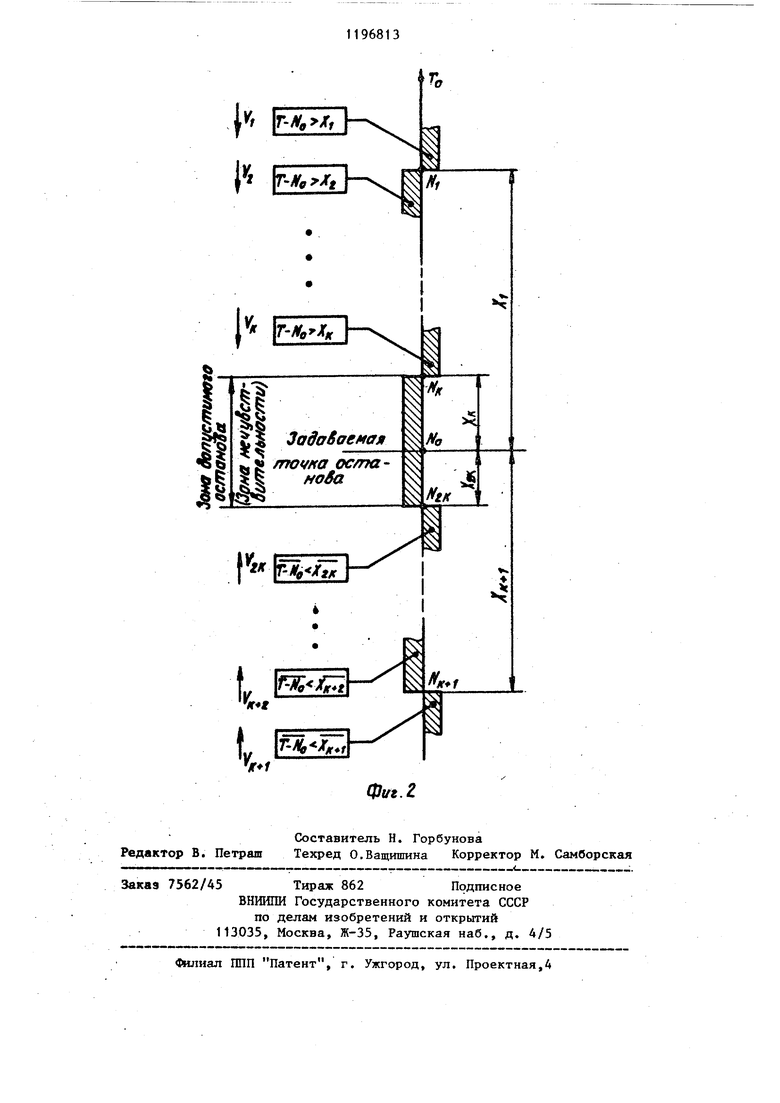
На фиг.1 дана блок-схема устройства на фиг.2 - зоны действия команд управления устройства k -ступенчатого останова.
Устройство содержит датчик 1 перемещения, реверсивньй счетчик 2 импульсов,, блок 3 сравнения, первьй 4 и второй 5 элементы И, сумматор 6, блок 7 ввода, исполнительный .блок 8, элемент ИЛИ-НЕ 9, генератор 10 импульсов, k -ступенчатый распределитель 11 импульсов, шифратор 12, третьи элементы И четвертые элементы И K.
В качестве импульсного датчика перемещения может быть использован любой известный датчик со схемой формирования импульсов на шинах (+) и (-) в зависимости от направления перемещения обьекта.
Блок 3 сравнения предназначен для сравнения И -разрядного кода рассогласования Т-Ы поступающего с выходов с 1матора 6 с п -разрядным кодом числа Х поступающего с информационных выходов шифра-тора 12, где N - координата точки останова объекта (фиг.2);Т - координата текущего положения подвижного объекта; X:; число, соответствующее расстоянию от заданной точки останова до точки, в которой .производится перевод со скорости V,на-скорость V, . При Т - NO X;сигнал. присутствует на первом выходе (Больше) блока 3 сравнения, а при Т- сигнал 1 присутствует на втором выходе (Меньше) блока 3 сравнения.
Сумматор 6 представляет собой любой нз известных сумматоров комбинационного типа и вьшолняет непрерывное вычисление кода рассогласования Т-М„, Это обеспечивается тем, что на одни входы сумматора 6 код текущего положения объекта Т поступает с выходов реверсивного счетчика 2 импульсов в прямом двоичном коде, а на другие входы сумматора 6 код заданной точки останова NO поступает с информационных выходов блока 7 ввода в обратном двоичном коде. В случае несовпадения координат Т и Np знак несовпадения и направление перемещения
5 объекта определяются единичным уровнем переноса Р и Р сумматора 6,Если Т N о (объект находится выше точки останова), единичный сигнал присутствует на прямом выходе переноса Р, при этом на информационных
0
выходах сумматора 6 код рассогласования T-NQ представлен прямым двоичным кодом минус единица. Если М (объект находится ниже точки останова), единичный сигнал присутс твует на инверсном выходе переноса Р, а код рассогласования Т-М представлен обратным двоичным кодом.
Исполнительный элемент 8 (напри0мер, привод) выдает соответствующее управляющее воздействие на объект управления, если на выходе элемента И 4 (или на выходе элемента И 5) будет присутствовать
5 сигнал 1 (что является для вертикального перемещения объекта командои Спуск
или соответственно командойПодъем), при этом скорость перемещения определяется номером
0 выхода k -ступенчатого распределителя, на котором присутствует сигнал 1.
k-Ступенчатый распределитель 11 имеет k выходов и может представлять собой, например, любой известный счетчик, имеющий k устойчивых состояний, к выходам триггеров которого подключен дещифратор с- выходами (1,2,k). Поступление
0 импульсов на тактовьй вход распределителя при наличии на его установочном входе сигнала 1 приводит к последовательному пробегу сигнала 1 на его выходах (от 1-го ,
5 снова от 1-го до k-ro и т.д.). В случае наличия сигнала О на установочном входе распределителя на первом выходе распределителя присутствует сигнал 1, а на всех остальных выходах распределителя присут-г ствуют сигналы О (независимо от поступления импульсов на тактовый вход распределителя).
Цифратор 12 может представлять собой двухмерную координатную матрицу, содержащую 2k горизонтальных ш (шин выборки) и П вертикальных шин (информационных кодовых шин),Установкой, например, диодов в соответствующих узлах координатной сетки, образЬванных пересечением 1 -и горизонтальной шины (i-й шины выборки с вертикальными информационными шинами, кодируется число V; , причем кодирование чисел V,,..., осуществляется в прямом двоичном коде минус единица, а кодирование чисел (:+ обратном двоичном коде. Это вызвано тем, что в блоке 3 сравнения код чисел X,,..,, X , расположенных выше точки останова (0 сравнивается с кодом рассогласования Т-Ng представленным на выходных шинах сумматора в прямом двоичном коде минус единица, а код чисел «. -, j расположенных ниже точки останова (Т Мд), сравнивается с кодом рассогласования Т N представленным обратным двоичным кодом.
Устройство работает следующим образом.
Объект неподвижен и находится, например, в точке Т (фиг,2), при этом содержимое реверсивного счетчика 2 однозначно соответствует коду текущего положения объекта (коду точки ) ,
Задание точки останова (ввод программы) пока еще не производилось, т,е, как на информационных, так и на управляющем выходе блока 7 присутствуют сигналы О, Сигнал 1 присутствует на первом выходе распределителя 11, На управляющие входы исполнительного элемента 8 поступают сигналы О, т,е, на объект управления никакое воздействие не оказьтается.
Затем производится ввод программы. Код задаваемой точки останова NO представленный обратным двоичным кодом (инверсное значение N,,), поступает с информационных выходов блока ввода 7 на сумматор 6, где вычисляется расстояние Т-N.TaiK
как объект расположен вьш1е точки останова (Т Мд|то единичный сигнал формируется на прямом выходе переноса Р сумматора 6, при этом на его информационных выходах рассогласование Т-NO представлено прямым двоичным кодом минус единица.
Так как единичный сигнал с прямого выхода переноса Р сумматора 6 разрешает работу двухвходовых элементов И 13,-13,, то единичный сигнал с 1-го выхода распределителя 11 поступает через элемент И 13j на первую пшну выборки щифра- ора 12, в результате чего на выходе (информационных шинах) шифратора 12 формируется п -разрядный код числа X, (прямой двоичный код минус единица), который сравнивается в блоке сравнения 3 с рассогласованием Т-Мр представленным прямым кодом минус единица.
Если , то при появлении единичного сигнала на управляющем выходе блока 7 ввода, последовавшего за вводом программы, имеем команду Спуск на скорости Vj (сигнал 1 присутствует на выходе элемента И 4 и на 1-м выходе распределителя 11), При этом на выходе элемента ШТИ-НЕ 9 присутствует сигнал О, что запрещает работу генератора 10 импульсов,
Если не больше чем X, то при появлении единичного сигнала на управляющем выходе блока 7 ввода команда на движение не вырабатьшается, в результате чего импульс, поступивший с выхода генератора 10 на тактовый вход распределителя 11, переводит последний из 1-го во 2-е положение (сигнал 1 будет присутствовать уже на 2-м выходе распределителя). Блок 3 сравнения будет уже сравнивать Т N с Х ,.ЕслиТ-Н по-прежнему не больше чем Х то следующий импульс с выхода генератора 10 переводит распределитель 11 в положение и т,д,, до тех пор пока рассогласование Т М не окажется большим числа X.
Если, например, T-Np Х,.то при появлении сигнала 1 на i -м выходе распределителя 11 на всех входах элемента И 4 имеем сигналы 1,
что приводит к формированию команды Спуск,.а до тех пор, пока сигнал 1 поступает на один из входов
5
элемента ИПИ-НЕ 9, с выхода этого элемента поступает на вход генератора 10 сигнал О, запрещающий работу последнего.
Таким образом, появление команды Спуск на i-м такте распределителя 11, приводит к спуску объекта управления на скорости, номинал которой определяется номером f -го выхода распределителя 11, на котором присутствует в этот момент сигнал 1. .Спуск на скорости Vj производится ;До тех пор, покаТ-М(, Х;.В момент прохода объекта точки N- No+X} код текущего положения Tj находящийся в реверсивном счетчике 2, принимает значение N; т.е. Т; N; No i .Сигнал 1 исчезает на выходе Больше блока 3 сравнения, что приводит к появлению сигнала О на выходе элемента И 4 (на выходе элемента И 5 уже гфисутствует сигнал О, так ка объект находится вьше точки останова и на выходе Р сумматора 6 присутствует сигнал О), Появление сигнала 1 на выходе элемента ИЛИ-НЕ 9 приводит к запуску генератора 10. Поступление импульса с выхода генератора 10 на тактовый вход распределителя 11 приводит к переходу в распределителе 11 сигнала 1 с выхода на выход 1 +1,
Если 1+1 4 К. то (ввиду того, что снова появится команда Спуск, но уже на скорости Vj+i В момент, когда объект (фиг.2) проходит вниз мимо точки N (точка отключения двигателя с упреждением при спуске), неравенство T-No)( сменится на равенство ) и затем вследствие движения на неравенство Т- . Объект входит в зону останова, в которой NjjiTiN, , Эта зона характерна тем, что, пока объект управления находится в ее пределах, ни на выходе элемента И 4, ни на выходе элемента И 5 сигнал 1 не появится. Это объясняется тем, что в этой зоне Т- - N X при Т N j, (объект распопржен выше точки останова) приТ; М (объект расположен ниже точки останова) ,
Таким образом, если объект находится в зоне останова, то ввиду тоfo, что ни одна из схем совпадения на элементах И 4 и 5 не собирается независимо от положения распредели968136
теля 11, будет отсутствовать команда на движение. Если приспуске объект проскочит зону останова, т.е. опустится ниже точки f jj. то 5 произойдет возврат объекта в зону останова по следующим причинам. В момент, когда объект спустится в зоне останова, не было уже команды Спуск и не было еще команды
О Подъем. Вследствие этого, наличие сигнала 1 на выходе элемента ИЛИ-НЕ 9 разрешает генератору 10 формировать импульсы, поступление которых на тактовьй вход распределителя 11 приводит к последовательному пробегу сигнала 1 на выходах распределителя 11 (1,1,2,...51с5 1,2,.. .,|i;, 1,2,... и т.д.).
Б момент, когда объект по какой-то причине все же по инерции вышел за пределы зоны останова (т.е. спустился ниже точки N) а распределитель 11 имел сигнал 1 на i -м своем выходе, будет иметь место последовательный пробег сигнала 1 с i -го выхода на k-и выход распределителя 11. Б момент, когда сигнал 1 появится наk-м выходе распределителя 11, блок 3 сравнения
30 начнет сравнивать код рассогласования Т- NJJ поступающий с выходов сумматора 6 в обратном коде, и обратный код числа Xjxj поступающий с выхода шифратора i2 (при 1 М еди35 ничньм сигналом с выхода Р сумматора 6 разрешается работа элементов И
13к, - этот момент T-N x,ju (т.е. сигнал 1 на втором выходе Меньше блока 3
40 сравнения) и есть сигнал 1 на выходе Р сумматора 6, то на выходе элемента И 5 появится сигнал 1 (команда Подъем) и будет осуществляться подъем на скорости Vy,.
5 При этом, так как на выходе элемента ИЛИ-НЕ 9 имеется сигнал О, генератор 10 оказьшается заторможенным .
0 При подъеме объекта (возврат в зону останова) в момент прохождения мимо точки Nj (точка отключения двигателя с упреждением при подъеме) неравенство лТк сменяется на равенство T-N x.i и затем, вследствие движения, на неравенство T-N;j х э; ,Б результате команда Подъем исчезает, так как на втором выходе Меньше блока 3 сравнения сигнал 1 сменяется на О. . С-этого момента генератор 10 заставляет распределитель 11 менять свое положение,, но пока объект будет находиться в зоне останова, исполнительный блок 8 не будет оказывать управляющего воздействия на объект управления, т.е. двигатель будет отключен в этом случае с упреждением при подъеме.
Предлагаемое устройство, имея простой алгоритм работы, позволяет, помимо многоступенчатого останова, производить реверс перемещения объекта в случае его случайного выбега за пределы зоны останрва, а также позволяет вводить новое задание и во время перемещения объекта, при этом максимальное время, затрачиваемое на выбор направления и скорости перемещения, сокращается по сравнению с известньм устройством более чем в два раза и не превьшает о (k-t), где k - число ступеней торможения, D - период следования импульсов генератора импульсов (у известного устройства это время составляет (2k-1).C ). Следовательно, предлагаемое устройство обеспечивает быструю реакцию исполнительного органа при вводе программы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления объектом с К - ступенчатым остановом | 1985 |
|
SU1287108A1 |
| Устройство для программного управления объектом с К-ступенчатым остановом | 1983 |
|
SU1130833A1 |
| Устройство для программного управления объектом с К-ступенчатым остановом | 1986 |
|
SU1348774A1 |
| Устройство для программного управления объектом с К-ступенчатым остановом | 1983 |
|
SU1123021A1 |
| Устройство для программного управления объектом с К-ступенчатым остановом | 1982 |
|
SU1083160A1 |
| ПОРОГОВЫЙ ЭЛЕМЕНТ | 1987 |
|
RU2034401C1 |
| Способ программного регулирования и устройство для его осуществления | 1987 |
|
SU1464147A1 |
| Устройство для определения оптимальных траекторий | 1983 |
|
SU1223240A1 |
| Устройство для вычисления показателя экспоненциальной функции | 1982 |
|
SU1043677A1 |
| СИСТЕМА ДИАГНОСТИРОВАНИЯ ЦИФРОВЫХ УСТРОЙСТВ | 1997 |
|
RU2127447C1 |
УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЖНИЯ ОБЪЕКТОМ С К -СТУПЕНЧАТЬМ ОСТАНОВОМ, содержащее шифратор, датчик перемещения, подключенный первым и вторым выходами к суммирующему и вычитающему входам реверсивного счетчика импульсов сумматор, соединенный первым входом с информационным выходом блока ввода, а информационным выходом - с первым входом блока сравнения, подклиоченного первьм и вторым выходами к первым входам соответственно первого и второго элементов И, связанных выходами с соответствующими управляющими входами исполнительного блока и с входами элемента ИЛИ-НЕ, подключенного выходом к входу генератора импульсов, соединенного выходом с тактовьм входом k-ступенчатого распределителя им-, пульсов, связанного установочным входом с управляющим выходом блока ввода, а выходами - с информационным входом исполнительного блока, отличающееся тем, что, с целью повышения быстродействия, в него введены группы треть- их и четвертых элементов И, подключенных первыми входами соответственно к прямому и инверсному выходам переноса сумматора и к вторым входам соответственно первого и второго элементов И, вторьми входами - к соответствующим выходам k-ступенчатого распределителя импульсов, а выходами - к входам шифратора, связанного выходами с вторым входом блока сравнения, причем СО Oi третьи входы первого и второго элементов И подключены к управляющему вьпсоду блока ввода, а выход ревер00 сивного счетчика импульсов - к второму входу сумматора.
| Устройство для программного управления объектом с К-ступенчатым остановом | 1982 |
|
SU1083160A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для программного управления объектом с К-ступенчатым остановом | 1983 |
|
SU1130833A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
