Изобретение относится к автоматизации производственных процессов и может быть использовано в различных системах управления перемещением объекта, например в системах управления перемещением подвижных элементов промьшленных роботов и вспомогательного оборудования робототехнических комп- лексов, а также в системах управления перемещением кислородной фурмы в конверторах.
Целью изобретения является упрощение переналадки устройства.
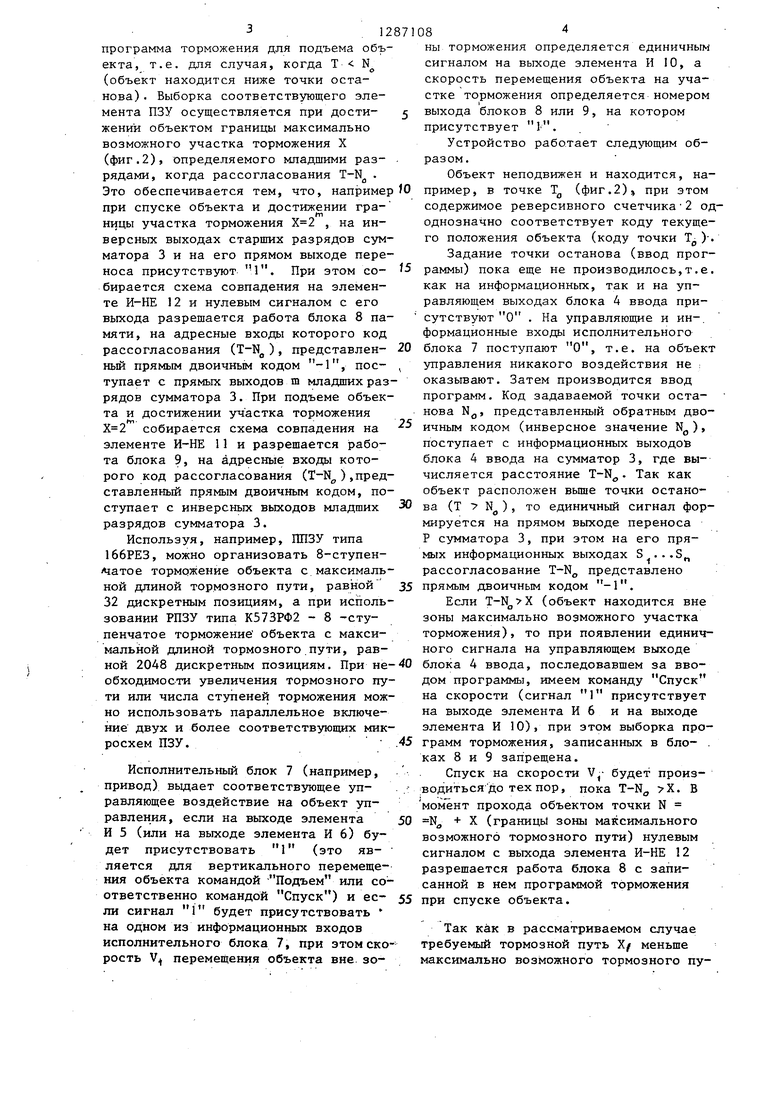
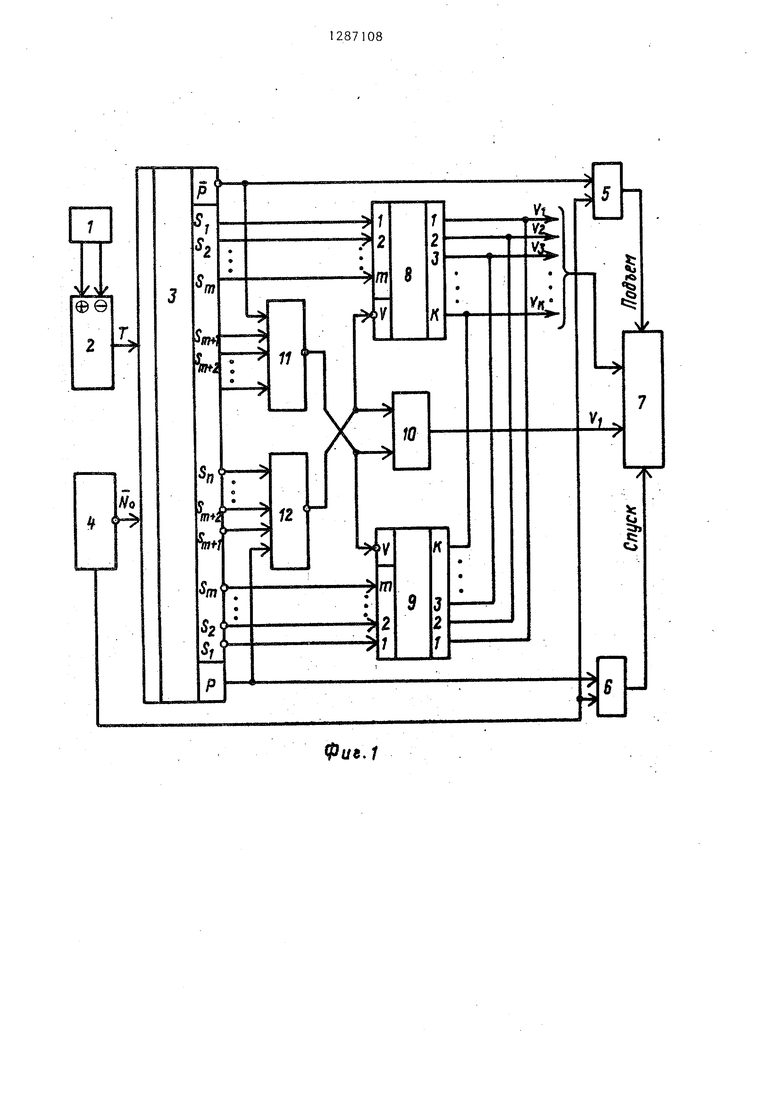
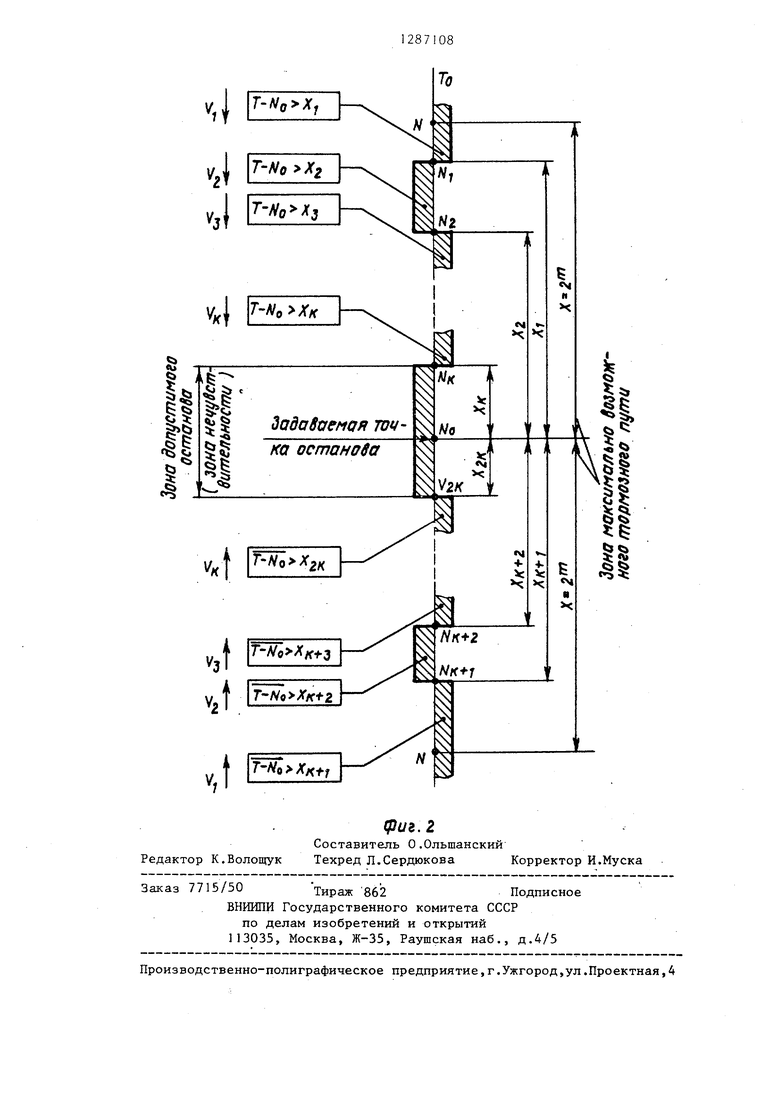
На фиг.1 представлена блок-схема устройства; на фиг.2 - зоны, действия команд управления устройства К-сту- пенчатого останова..
Устройство содержит датчик 1 перемещения, подключенный к реверсив- ному счетчику 2 импульсов, сумматор 3, соединенный первым и вторым входами соответственно с выходами реверсивного счетчика 2 и- блока 4 ввода, рервый 5 и второй 6 элементы И, под- ключенные первыми входами соответственно к инверсному и прямому выходам переноса сумматора 3, вторыми входами - к управляющему выходу блока 4 ввода, а выходам - к соответствующим управляющим входам исполнительного блока 7. Прямые и инверсные выходы m младших разрядов сумматора 3 подключены соответственно к адресным входам первого 8 и второго 9 .блоков памяти. Вход выборки второго блока 9 памяти, связанной с одним входом третьего элемента И 10, соединен с выходом первого элемента И-НЕ 11,подключенного входами к прямым выходам п-m старших разрядов сумматора 3 и к его инверсному выходу переноса. Вход выборки первого блока 8 памяти, связанный с другим входом третьего элемента И 10, соединен с выходом второго, элемента И-НЕ 12, подключенного входами к инверсным выходам п-тп старших разрядов сумматора 3 и к его прямому выходу переноса. Выход третьего элемента И 10 и попарно объединенные одноименные выходы блоков памяти 8 и 9 подключены к соответствующим информационным входам исполнительного блока.
В качестве импульсного датчика 1 перемещения может быть использован любой известный датчик со схемой формирования импульсов на шинах (+) и
(-) в зависимости от направления перемещения объекта.
Сумматор 3 представляет собой любой из известных сумматоров комбинационного типа и выполняет непрерывное вычисление кода рассогласования T-N . Это обеспечивается тем, что на одни входы сумматора 3 код текущего положения объекта Т поступает с выходов реверсивного счетчика 2 импульсов в прямом двоичном коде, а на другие входы сумматора 3 код заданной точки останова N цоступает с информационных выходов блока 4 ввода в обратном двоичном коде. В случае несовпадения координат Т и N знак несовпадения и направление перемещения .объекта, определяются единичным уровнем сигналов переноса Р и Р сумматора 3.
Если Т N .(объект находится выше точки останова), единичный сигнал присутствует на прямом выходе переноса Р, при этом на прямых информационных выходах S, - -S сумматора 3 код рассогласования T-N представлен прямым двоичным кодом -I.
Если Т N(объект находится ниже точки останова), единичный сигнал присутствует на инверсном выходе переноса Р, а код рассогласования T-N, представлен прямым двоичным кодом на инверсных информационных выходах S,..-S сумматора 3.
В качестве блоков 8 и 9 памяти могут использоваться как ГШЗУ - однократно программируемые пользователем при помощи плавких перемычек ПЗУ (например, 155 РЕЗ, РКР556РТ4), так и РПЗУ - репрограммируемые ПЗУ, допускающие неоднократное стирание и запись информации (например, К573РФ, К573РФ2). Каждой дискретной координате участка тормозного пути соответствует определенная ячейка ПЗУ с записанным в не-е словом 5 определяющим значение скорости, с которой объект должен проходить данную координату, причем значение скорости однозначно зависит от того, в каком разряде слова записана 1 (1 в первом разряде слова соответствует первой скорости V, 1 во втором разряде - вто- рой скорости V, и т.д.). В блоке 8 записана программа торможения для пуска объекта, т.е. для случая, когда (объект находится вьппе точки останова), а в блоке 9 записана
3 .12
программа торможения для подъема объекта, т.е. для случая, когда Т N (объект находится ниже точки останова) . Выборка соответствующего элемента ПЗУ осуществляется при дости- жений объектом границы максимально возможного участка торможения X (фиг.2), определяемого младшими раз- рядами, когда рассогласования T-N . Это обеспечивается тем, что, нап зимер при спуске объекта и достижении гра/П
ницы участка торможения , на инверсных выходах старших разрядов сумматора 3 и на его прямом выходе переноса присутствуют 1. При этом со- бирается схема совпадения на элементе И-НЕ 12 и нулевым сигналом с его выхода разрешается работа блока 8 памяти, на адресные входы которого код рассогласования (T-N), представлен- ный прямьм двоичньгм кодом -1, пос- тупает с прямых выходов m младших разрядов сумматора 3. При подъеме объекта и достижении участка торможения собирается схема совпадения на элементе И-НЕ 11 и разрешается работа блока 9, на адресные входы которого код рассогласования (Т-Н ), представленный прямым двоичным кодом, поступает с инверсных выходов младших разрядов сумматора 3.
Исполъзуя, например, ПИЗУ типа 166РЕЗ, можно организовать 8-ступен- Л1атое торможение объекта с максимальной длиной тормозного пути, равной 32 дискретным позициям, а при использовании РИЗУ типа К573РФ2 - 8 -ступенчатое торможение объекта с максимальной длиной тормозного.пути, равной 2048 дискретным позициям. При необходимости увеличения тормозного пути или числа ступеней торможения можно использовать параллельное включение двух и более соответствующих микросхем ПЗУ.
Исполнительный блок 7 (например, привод) вьщает соответствующее уп- равляющее воздействие на объект управления, если на выходе элемента И 5 (или на выходе элемента И 6) будет присутствовать 1 (это является для вертикального перемещения объекта командой Подъем или соответственно командой Спуск) и ее- ли сигнал 1 будет присутствовать на одном из информационных входов исполнительного блока 7, при этом скорость V перемещения объекта вне зо84
ны торможения определяется единичным сигналом на выходе элемента И 10, а скорость перемещения объекта на участке торможения определяется номером выхода блоков 8 или 9, на котором присутствует I.
Устройство работает следующим образом.
Объект неподвижен и находится, например, в точке Тд (фиг.2), при этом содержимое реверсивного счетчика2 од- однозначно соответствует коду текущего положения объекта (коду точки Т ).
Задание точки останова (ввод программы) пока еще не производилось,т.е. как на информационных, так и на управляющем выходах блока 4 ввода при- сутствуют О . На управляющие и ин-. формационные входы исполнительного блока 7 поступают О, т.е. на объект управления никакого воздействия не ; оказывают. Затем производится ввод программ. Код задаваемой точки останова NIJ , представленный обратным двоичным кодом (инверсное значение N), поступает с информационных выходов блока 4 ввода на сумматор 3, где вычисляется расстояние T-N. Так как объект расположен вьпие точки останова (Т 7 N), то единичный сигнал формируется на прямом выходе переноса Р сумматора 3, при этом на его прямых информационных выходах S ...5„ рассогласование T-N представлено прямым двоичным кодом -1.
Если (объект находится вне зоны максимально возможного участка торможения), то при появлении единичного сигнала на управляющем выходе блока 4 ввода, последовавшем за вводом программы, имеем команду Спуск на скорости (сигнал 1 присутствует на выходе элемента И 6 и на выходе элемента И 10), при этом выборка программ торможения, записанных в бло- . ках 8 и 9 запрещена.
Спуск на скорости V - будет производиться До тех пор, пока T-Ng Х. В момЪнт прохода объектом точки N Кд + X (границы зоны максимального возможного тормозного пути) нулевым сигналом с выхода элемента И-НЕ 12 разрешается работа блока 8 с записанной в нем программой торможения при спуске объекта.
Так как в рассматриваемом случае требуемый тормозной путь X/ меньше аксимально возможного тормозного пути X, (фиг.2), то участок пути от точки N до точки N объект должен пройти с прежней скоростью V . Это достигается тем, что в ячейках блока 8, соответствующих каждой дискретной координате участка пути от N до I записана в первом разряде слова, благодаря чему при последовательной выборке этих ячеек mмладшими разрядами кода рассогласования T-N единичный сигнал будет постоянно присутствовать на первом выходе блока 8, и следовательно объект будет продолжать спуск на скорости V, .
При достижении точки N (порога снижения скорости) объект автоматически переходит на пониженную скорость Vj, с которой осуществляется его дальнейший спуск до точки N.
Это обеспечивается тем, что в ячейках блок 8, соответствующих каждой дискретной координате участка тормозного пути X,- Xg (от точки N, до точки N5), 1 записана во вторых разрядах и следовательно при прохождении объектом данного участка пути и сопровождаемой при этом последовательной выборке указанных ячеек ПЗУ единичный сигнал будет постоянно присутствовать на втором выходе блока 8, поддерживая тем самым скорость , объекта Vj .
При достижении точки N происходи автоматический переход на скорость Vj и т.д.
В момент, когда объект будет (фиг.2) проходить вниз мимо точки N (точки отключения двигателя с упреждением при спуске), управляющее воздействие с объекта снимается. Объект вошел в зону останова. Эта зона характерна тем, что пока объект управления находится в ее пределах, ни на одном из информационных входов исполнительного блока 7 1 не появится. Это обеспечивается тем, что в ячейках блоков 8 и 9, соответствующих каждой дискретной координате участков Х и Х, зоны останова, 1 не записана и, следовательно, при последовательной выборке этих ячеек в результате выбега объекта ни на одно из выходов блоков 8 и 9 1 не появляется .
Таким образом, если объект находится в зоне останова, то ввиду того что ни на одном из информационных входов исполнительного блока 7
871086
не появляется, отсутствует команда на движение.
Если при спуске объект проскочит зону останова, т.е. спустится ниже 5 точки , происходит возврат объекта в зону останова по следующим причинам .
Когда объект за счет выбега опус
кается ниже точки останова N , то
О
команда Спуск меняется на команду Подъем, так как Т N и единичный сигнал формируется уже на инверсном выходе переноса Р сумматора 3. Одновременно собирается схема совпадения
на элементе И-НЕ 1 и- нулевым сигналом с его выхода разрешается работа блока 9 с записанной в нем программой торможения при подъеме объекта. Но пока объект еще находится в
зоне останова (на участке от точки N до точки N,JK), единичный сигнал ни на одном из выходов блока 9 не появляется, так как в его ячейках соответствующих каждой дискретной координате этого участка 1, не записана и исполнительный блок 7 не оказывает управляющего воздействия на объект управления.
Если объект по какой-то причине- все же выщел за пределы зоны останова (т.е. опустился ниже точки Ng| ) , то кодом рассогласования T-N, снимаемым с инверсных выходов суммато- ра 3, выбираются ячейки блока 9, соответствующие дискретным координатам
участка тормозного пути X
2К
- X,
2К-1
расположенного ниже точки N , в которых ЕДИНИЦА записана в последнем (К-м) разряде. Так как в этот момент присутствует на выходе Р сумматора 3, то осуществляется подъем на скорости Vn.
При подъеме объекта (возврат в 5 зону останова) в момент прохождения мимо точки N,j| (точка отключения двигателя с упреждением при подъеме) управляющее воздействие с объекта снимается. И пока объект находится в 0 зоне останова, исполнительный блок. 7 не оказывает управляющего воздействия на объект управления, т.е. двигатель отключен в этом случае с упреждением при подъеме. 5 Предлагаемое устройство, имея простой алгоритм работы, позволяет помимо многоступенчатого останова про- .изводить реверс перемещения объекта в случае его случайного выбега за
пределы зоны останова, а также позволяет вводить новое задание и во время перемещения объекта, при этом время выбора направления и скорости перемещения объекта в нем сведено к минимуму, так как определяется лишь собственным временем (переключения) задержки логических элементов схемы и не превышает десятки не. Предлагаемое устройство по сравнению с про тотипом отличается простотой технической реализации, так как не требует К-устойчивого элемента (распределителя импульсов) и управляемого генератора тактовых импульсов, что, в свою очередь, повышает надежность его работы. Кроме случае изменения программы торможения микросхему ПЗУ легко можно заменить другой с новой программой. Благодаря эт му возможна оперативная перестройка программы торможения, для чего устройство может снабжаться комплектом микросхем ПЗУ с записанными в них программами для различных случаев томожения и перестройка сводится к замене одних микросхем ПЗУ другими, которые устанавливаются в соответствующие панельки платы устройства.
Формула изобретения
Устройство для программного управления объектом с К-ступенчатым остановом содержащее датчик перемещения, первый и второй выходы которого подключены к первому и второму входам
0
0
5
счетчика импульсов, выход которого подключен к первому входу сумматора, вторые входы которого подключены к первым выходам блока ввода, вторые выходы которого соединены с первыми входами первого и второго элементов И, вторые входы которых соединены с первым и вторым выходами сумматора соответственно, а выходы - с первым и вторы м входами исполнительного блока соответственно, отличающееся тем, что, с целью.упрощения переналадки устройства, в него введены первый и второй элементы И-НЕ, трети:й элемент И, а также первый и второй блоки памяти, подключенные первыми входами к третьим и четвертым выходам сумматора, пятые и шестые выходы которого соединены с первыми входами первого и второго элементов И-НЕ соответственно, выходы первого элемента И-НЕ соединены с первым входом третьего элемента И и со вторым входом первого элемента памяти, выходы которого объединены поразрядно с соответствующими выходами второго блока памяти и соединены с третьими входами исполнительного блока, четвертый вход которого соединен с выходом третьего элемента И, второй вход которого соединен со вторым вхо-. дом второго блока памяти и с выходом второго элемента И-НЕ, второй вход которого соединен со вторым выходом сумматора, первый выход которого соединен со вторым входом первого элемента И-НЕ.
Фиб. 1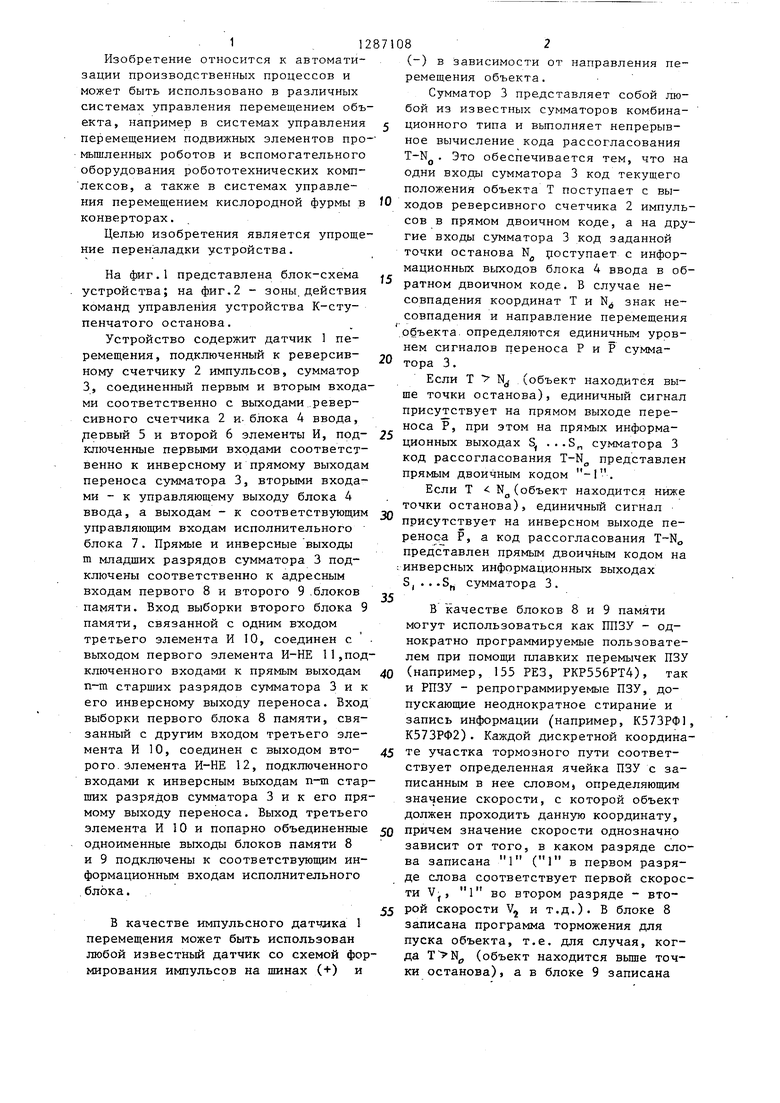

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления объектом с К-ступенчатым остановом | 1986 |
|
SU1348774A1 |
| Устройство для программного управления объектом с @ -ступенчатым остановом | 1984 |
|
SU1196813A1 |
| Устройство для программного управления объектом с К-ступенчатым остановом | 1983 |
|
SU1123021A1 |
| УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО КОНТРОЛЯ | 1991 |
|
RU2015523C1 |
| Устройство для контроля цифровых узлов | 1984 |
|
SU1231506A1 |
| Устройство для программного управления | 1983 |
|
SU1160367A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ГРУППОВОГО ВОЖДЕНИЯ ДОРОЖНЫХ МАШИН И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2664033C1 |
| Устройство для программного управления электроприводом | 1985 |
|
SU1260919A1 |
| Устройство управления позиционированием | 1987 |
|
SU1462248A1 |
| Устройство для программного управления разгоном и торможением двигателя | 1986 |
|
SU1314309A1 |
Изобретение относится к области автоматизации производственных процессов и может быть использовано в системах управления объектов. Цель изобретения - упрощение процесса переналадки устройства - достигается введением новых блоков и функциональных связей, позволяющих путем замены микросхем памяти переналаживать устройство на вьтолнение другой программы. Устройство для программного управления объектом с К-ступенчатым остановом содержит датчик перемещения, реверсивный счетчик, сумматор, блок ввода, элементы И, исполнительный блок, блоки памяти, элементы И-НЕ. Упрощение процесса переналадки устройства достигается введением двух блоков памяти, а также применением двух элементов И-НЕ и одного элемента И. 2 ил. i (Л ю 00 
| Устройство для программного управления объектом с К-ступенчатым остановом | 1983 |
|
SU1130833A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Счетно-импульсное устройство для программного управления объектом с К-ступенчатым остановом | 1981 |
|
SU1007085A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для программного управления объектом с @ -ступенчатым остановом | 1984 |
|
SU1196813A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
