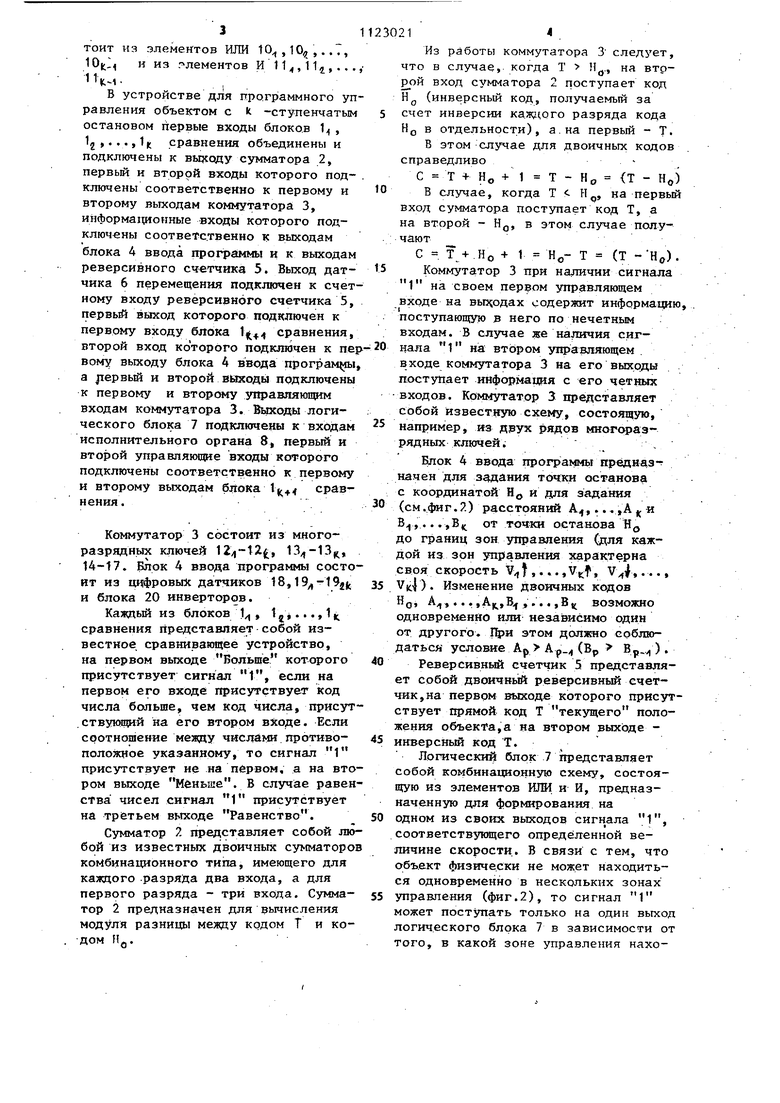
I Изобретение относится к автомати зации производственных процессов и может быть использовано в различных системах управления перемещением объекта, например в системах управл ния перемещением кислородной фурмы конверторе, в станках с числовым программным управлением в роботах. .Известна счетно-импульсная систе ма программного управления, содержащая генератор импульсов, датчик перемещения, подключенный к реверсивному счетчику, а через него к сравнивающему устройству, второй вход которого соединен с блоком : ввода программы, исполнительный орган и логический блок, подклюЧенный к сравнивающему устройству датчику перемещения, генератору импульсов, блоку ввода программы,счет чику импульсов, а через него к испо нительному органу, к которому подключено и сравнивающее устройствоСО Недостатки такой системы - сложный алгоритм работы, невозможность автоматического возврата объекта в зону допустимого останова в случае выбега за эту зону, невозможность корректировки задания во время перемещения объекта. Наиболее близким по техническойсущности к предлагаемому является счетно-импульсное устройство для программного управления объектом с . к -ступенчатьв остановом, содержащее 2 k реверсивных счетчиков и 2k блоков сравнения, 1)Ь1ходы которых через логический блок подключены к испЬлнительному органу, первые входы.объединены и подключены к выходу блока ввода программь, вторы входы Соединены с выходами реверсивных счетчиков, счетные входы ко торых объединены и подключены к выходу датчика перемещения, последова тельно соединенные генератор импульсов, счетчик импульсов и блок задания исходных состояний реверсивных счетчиков 2. Недостатками известного устройства являются относительная сложность его схемной реализации, соответственно недостаточная надежность, а также невозможность изменения величины зон управления. Цель изобретения - упрощение устройства, повьЩ1ение надежности в 1I работе и расширение его функциональных возможностей. Поставленная цель достигается тем, что в устройство для программного управления объектом с k -ступенчатьм остановом, содержащее датчик перемещения, подключенньй выходом к входу редерсивного счетчика, выходы (k-H)-го блока сра внения соединены с первьм входом исполнительяого органа, а выходы k. блоков сравнения соединены через логический блок с вторьми входами исполнительного органа, первый вход k.-«-1)-ro блока сравнения соедине:н с прямым выходом реверсивного счетчика, а второй вход - с первым выходом блока ввода програмкол, введены коммутатор и сумматор, входы которого соединены с первыми выходами коммутатора, а выход - с перзаня входами fc блоков сравнения, вторые вжоды которых через коммутатор подключены к вторым выходам блока рвода пр ограммы, инверсйый Ьыход реверсивного счетчика соединен с третьим входом коммутатора, а прямой г с четвертым входом ко1 утатора управляющие входы котороге подключены к выходам (k.)-гo блока сравнения, третий вход сум матора соедймеи с шной 1. того, коммутатор содержит две группы многоразрядных ключей, управлйкйане входы многоразрядных ключей обеих групп подключены к управляюпрм входам коммутатора,выходы многоразрядных ключей объединены и подключены к первым и вторым выходам коммутатора, а их информационные входы соединены с соответствующими входами коммутатора. На. фиг. 1 приведена структурная схема устройства; на 4мг,2 - относительное расположение зон действия команд управления исполнительного органа устройства; на фиг.З - схема коммутатора} на фиг.4 - блок ввода программы. Устройство для программного управления объектом с k. -ступенчатым остановом содержит блоки 1 ,. .., . сравнения, сумматор 2,, коммутатор 3, блок 4 ввода программы, реверсивный счетчик 5, датчик 6 перемещения, логический блок 7, исполнительный орган 8, шину 9 цифры 1. Логический блок 7 сос
тоит из элементов ИЛИ 10 , ,..., 10(,, и из г-лементов И 11 , 11 j ,.,.,
Vi. , .
в устройстве для программного управления объектом с k -ступенчатым остановом первые входы блоко.в 1 , сравнения объединены и подключены к вьрсоду сумматора 2, первьй и второй входы которого под- . ключены соответственно к первому и второму выходам коммутатора 3, информационные входы которого подключены соответственно к выходам блока 4 ввода программы и к выходам реверсивного счетчика 5. Выход датчика 6 перемещения подключен к счетному входу реверсивного счетчика 5, первый выход которого подключен к первому входу блока сравнения, второй вход которого подключен к пер вому выходу блока А ввода программа, а ервый и второй выходы подключены к первому и второму управляющим входам коммутатора 3. Выходы логического блока 7 подключены к входам исполнительного органа 8, первый и второй управляющие входы которого подключены соответственно к первому и второму выходам блока 1(4 сравнения.
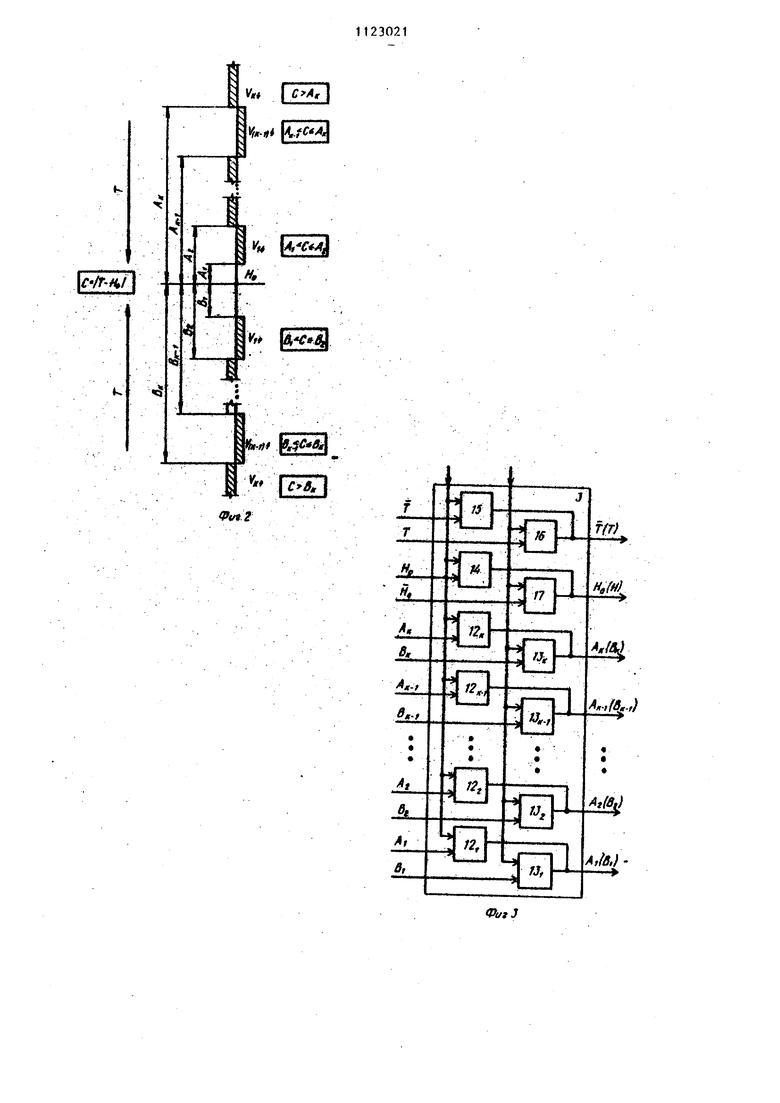
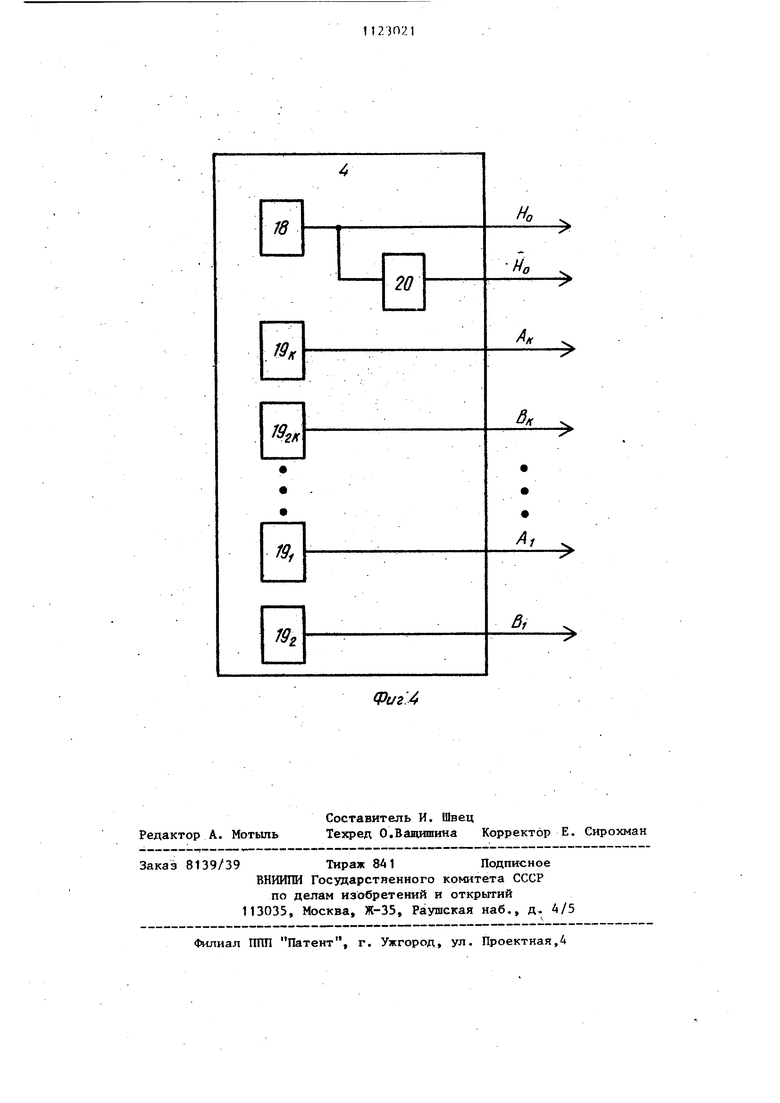
Коммутатор 3 состоит из многоразрядных ключей , , 14-17. Блок 4 ввода программы состоит из цифровых датчиков 18,19,-19jfc и блока 20 инверторов.
Казютьй из блоков 1 , 1 j..., 1 ц сравнения представляет собой известное сравнивающее устройство, на первом выходе Больше которого присутствует сигнал 1, если на первом его входе присутствует код числа больше, чем код числа, присутствующий на его втором входе. Если соотношение мезвду числйми противоположное указанному, то сигнал 1 присутствует не .на первом, а на втором выходе Меньше. В случае равенства чисел сигнал 1 присутствует на третьем вьпсоде Равенство.
Сумматор 2 представляет собой любой из известных двоичных сумматоров комбинационного типа, имеющего для каждого .разряда два входа, а для первого разряда - три входа. Сумматор 2 предназначен для вычисления модуля разницы между кодом Т и кодом Ид..
Из работы коммутатора 3 следует, что в случае, когда Т ., на втрррй вход сумматора 2 поступает код Нд (инверсный код, получаемый за счет инверсии каждого разряда кода HO в отдельности), а.на первый - Т.
В этом случае для двоичных кодов справедливоС Т -I- HO + 1 Т - HO Т - HO
В случае, когда Т Н,, на первы вход сумматора поступает код Т, а на второй - HQ, в этом случае получают
С Т +.HO + 1 HO- Т (Т -HO)
Коммутатор 3 при наличии сигнала 1 на своем первом управляющем входе на выходах содержит информаци поступающую в него по нечетным входам. В случае же наличия сигнала 1 на: втором управляющем входе коммзггатора 3 на его выходы поступает информация с его четных входов. Коммутатор 3 представляет собой известную , состояпппо, например, кз друх рядов мнагоразрядных ключей;.
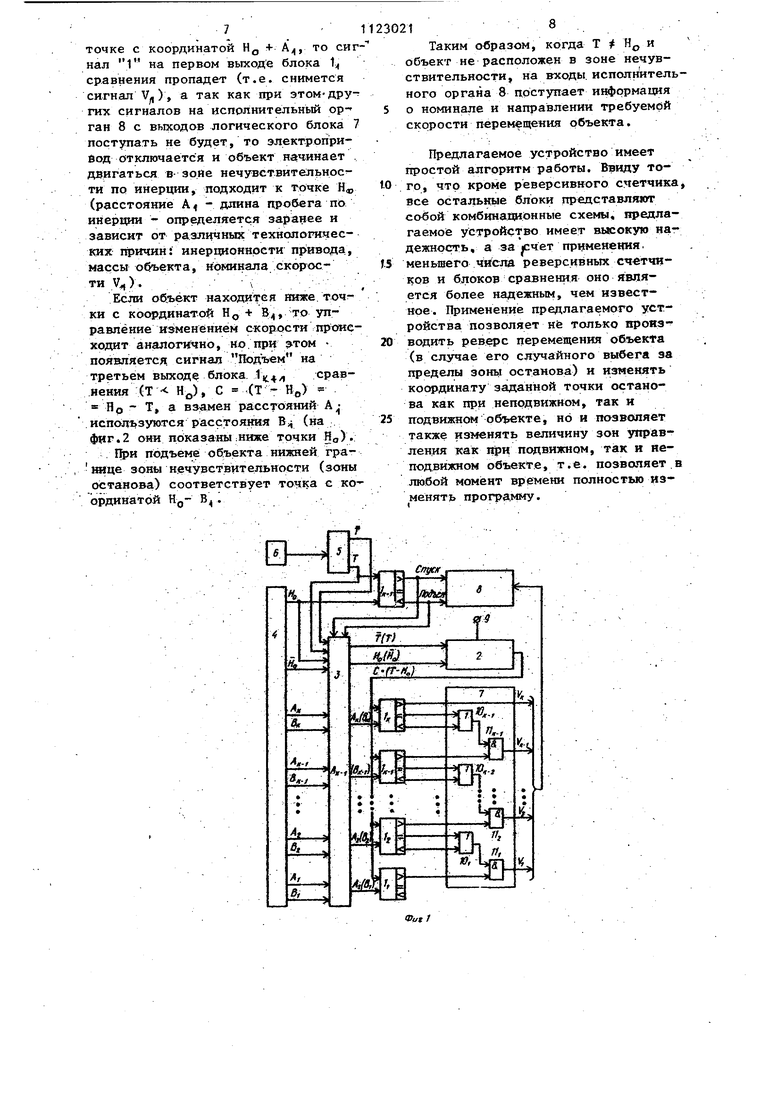
Блок 4 ввода программьг предназначен для задания точки останова с координатой Н и для задания (см.фиг.7.) расстояний А,...,А и В,. ..,В, от точки останова HO до границ зон управления (для каждой из зон управления характерна своя скорость V., V/,f,..., V|c|). Изменение двоичных кодов Нд, А, .. ,А|;,,В , .«, В)( возможно одновременно или независимо один от другого. этом должно соблюдаться условке Ар Ар (Вр Вр. ) .
Реверсивный счетчик 5 представляет собой двоичный реверсивный счетчик, на первом выходе которого прксзпствует прямой код Т текущего положения объекта,а на втором выходе инверсный код Т.
Логический блок 7 представляет собой комбинационную схему, состоящую из элементов ИЩ и И, предназначенную для формирования на одном из своих выходов 1, соответствукнцего определенной величине скорости. В связи с тем, что объект физически не может находиться одновременно в нескольких зонах управления (фиг.2), то сигнал 1 может поступать только на один выхо логического блока 7 в зависимости о того, в какой зоне управления нахо5дится в.данный момент объект.Если объект находится выше заданной точки останова Нд, но не далее чем Н о + А,,, или же ниже точки Нд, но не далее Н + В , т.е. в зоне нечувствительности, то сигнал 1 не будет присутствовать ни на одном выходе логического блока 7. Исполнительньй орган 8 может представлять собой, например, релей ную схему, предназначенную формировать команду на перемещение объекта с определенной скоростью в соответствующем направлении в случае. когда сигнал 1 поступает на один: К входов исполнительного органа 8 со стороны логического блока 7 (эти определяется номинал скорости) и од новременно с этим поступает сигнал 1 на (К+Г)-й либо (R+2)-и вход исполнительного органа 8 со стороны блока 1 сравнения .(этим опреде ляется направление скорости). Если же информация о необходимом номинале скорости в исполнительньй орган 8 не поступает (объект расположен в зоне нечувствительности) или в исполнительный орган 8 не поступает информация о .направлении скорости (Т Но) команда на движение исполнительным органом 8 не выдается (привод отключен). Устройство работает следукицнм образом. Во время перемещения объекта с датчика 6 перемещения поступают импульсы на вход реверсивного счетчика 5, на выходах которого присутствуют прямой Т и инверсный коды координаты объекта. В результате сравнения кода Т с кодом Но задания точки останова на одном из выходов блока ,, фор мируется сигнал 1, который опреде ляет направление.перемещения объекта к точке HQ. В зависимости от знака неравенст ва между заданньм и теку1щм положением объекта, с вькодов реверсивного счетчика 5 и блока 4 ввода программы через коммутатор 3 на цервьй и второй входы сумматора 2 поступают соответственно коды Т и И или Т и На выходе сумматора 2 присутству ет код С (Т - ), т.е. код величины расстояния между объектом и заданной точкой его останова (величина рассогласования). 21 С выходов блока 4 ввода программы через коммутатор 3 на вторые входы блоков 1 сравнения поступают коды расстояний между точкой останова Н и соответствующими границами зон управления. В случае, например, вертикального перемещения объекта на вторые входы блоков 1 , ...,1 сравнения в зависимости от знака соотношения между кодами Т и HO поступают коды расстояний между заданной точкой Н (фиг.2) и точками Ар или Вр, расположенны-ми соответственнр выше или ниже точки Нд. В зависимости от расположения объекта по отношению к точке заданного останова Hj, сигнал 1 может присутствовать либо только на первом выходе; блока 1 сравнения (это характерно для случая, когда С Ац. (Bj(), либо одновременно на втором и третьем выходах блока 1р сравнения и на первом выходе блока 1.p-i сравнения (это характерно для случая., когда Ap-i(B|,-i) С $ Ар(Вр). Если объект находится .(фиг,2) выше точки с .координатой HO « А., так как в этом случае (Т - HO) Т - Нг , то с но так как Т v Н + А, то Т.- , т.е. С Ац,. В это.м случае, так какх Н с первого выхода блока 1 . сравнения на вход исполнительного органа 8 поступает команда Спуск, а с первого вьиода блока 1 сравнения на исполнительный орган 8 через логический блок 7 поступает сигнал V)t. В результате производится спуск объекта на скорости V. В тот момент, когда объект подойдет. к точке с координатой Н, + А1, сигнал 1 на первом выходе блока. . сравнения пропадет, а наего втором выходе (С появится. Так как при этом С А, то на первом выходе блока l. сравмения присутствует также сигнал 1. В результате с выхода элемента И , на вход исполнительного органа 8 поступает сигнал V.. т.е. продолжается спуск, но уже на скорости V,. Переход на другие сксзрости при входе объекта в другие зоны управления производится аналогично .. Когда же объект подойдет к
7
точке с координатой H А, то сигнал 1 на первом выходе блока 1 сравнения пропадет (т.е. снимется сигнал V), а так как при этом-других сигналов на исполнительный ор гаи 8 с выходов логического блока 7 поступать не будет, то электроприйод отключается и объект начинает , двигаться в- зойе нечувствитель1нос ти по инерции, подходит к точке Нд, (расстояние А - длина пробега по инерции - определяется заранее и зависит от различных технологических причин: инерционности пр ивода, массы объекта, номинала скор ости ,V,,. . .- - ( V- /- Если объект находится ниже точки с координатой HQ + В, то управление изменением скорости происходит аналогично, но,при этом появляется, сигнал Шэдъем на третьем выходе блока. сравнения (Т HO), С (Т - HO) HP Т, а взамен ра сстояний А используются расстояния Вц (на Фиг.2 они показаны :Ниже точки RO). При пЬдъеме объекта нижней гра Ш1це зоны нечувствительност-и (зоны останова) соответствует точка с координатой Нд- В.
230218 .
Таким образом, когда Т # Н и
объект не расположен в зоне нечувствительности, на входы, исполнительного органа 8 поступает информация 5 о номинале и направлении требуемой скорости перемещения объекта.
Предлагаемое устройство имеет простой алгоритм работы. Ввиду то10 го, что кроме реверсивного сметчика, все остальные блоки представляют собой комбинавионные схемы, предлагаемое устройство имеет высокую надежность, а за «счет применения.
15 меньшего реверсивных счетчиков и блоков сравнения оно явияется более надежным, чем известное. Применение предлагаемого устройства позволяет не только нрояз20 водить реверс перемещения объекта (в случае его случайного выбега за пределы зоны останова) и изменять косфдинату заданной точки останова как при неподвижном, так и
25 подвижном объекте, но и позволяет также изменять величину зон управления как 1ФИ подвижном, так и неподвижном объекте, т.е. позволяет.в любой момент времени полностью измен5ггь програ сму.
ю
Нп
Ип
-
20

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления объектом с К-ступенчатым остановом | 1982 |
|
SU1083160A1 |
| Устройство для программного управления объектом с К-ступенчатым остановом | 1983 |
|
SU1130833A1 |
| Счетно-импульсное устройство для программного управления объектом с К-ступенчатым остановом | 1981 |
|
SU1007085A1 |
| Устройство для программного управления | 1983 |
|
SU1160367A1 |
| Устройство для программного управления | 1983 |
|
SU1117591A1 |
| Устройство для программного управления объектом с @ -ступенчатым остановом | 1984 |
|
SU1196813A1 |
| Устройство для программного управления объектом с К - ступенчатым остановом | 1985 |
|
SU1287108A1 |
| Устройство для программного управления объектом с К-ступенчатым остановом | 1986 |
|
SU1348774A1 |
| Цифровое устройство для управления позиционным приводом | 1970 |
|
SU911459A1 |
| Устройство для автоматической центрировки линз | 1982 |
|
SU1118882A1 |
1. УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ ОБЪЕКТОМ С k -СТУПЕНЧАТЫМ ОСТАНОВОМ, содержащее датчик, перемещения, подключенный выходом к входу реверсивного счетчика, выходы (k+D-ro блока сравнения соединены с первыми входами исполнительного органа, а выходы k блоков сравнения соединены через логический блок с вторыми входами исполнительного органа, вход ()-ro блока сравнения соединен с прямым выходом реверсивного счетчика, а второй вход - с первым выходом блока ввода программы, отличающееся тем, что, с целью упрощения устройства, повьшения надежности его работы, в него введены коммзггатор и сумматор, входы которого соединены с первыми выходами коммутатора, а выход - с первь(и входами блоков сравнения, вторые входы которых через коммутатор подключены к вторым выходам блока звезда програмюл, инверсный выход реверсивного счетчика соединен с третьим входом коммутатора, а прямой - с четвертым входом коммутатора, управляющие входы-, которого подключены к выходам (к+1)-го блока сравнения, третий вход суммато9 ра соединен с шиной 1. 2. Устройство по п.1, отличающееся тем, что коммутатор содержит две группы многсфазрядных ключей, управляющие входы многоа разрядных ключей обеих групп подключены к управлякнфш входам коммутатора, выходы многоразрядных ключейобъединены и подключены к первьм и о вторым выходам коммутатора, а их 9 информационные входы соединены с соответствующими входами коммутатора.
W,
гл
W,
-
В,
Ai
-
В,
Фиг4
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Счетно-импульсная система программного управления | 1973 |
|
SU452808A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Счетно-импульсное устройство для программного управления объектом с К-ступенчатым остановом | 1981 |
|
SU1007085A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
