(54) СИСТЕМА ДЛЯ ГРУППОВОГО ВОЖДЕНИЯ
САМОХОДНЫХ СЕЛЬСКОХОЗЯЙСТВЕННЫХ МАШИН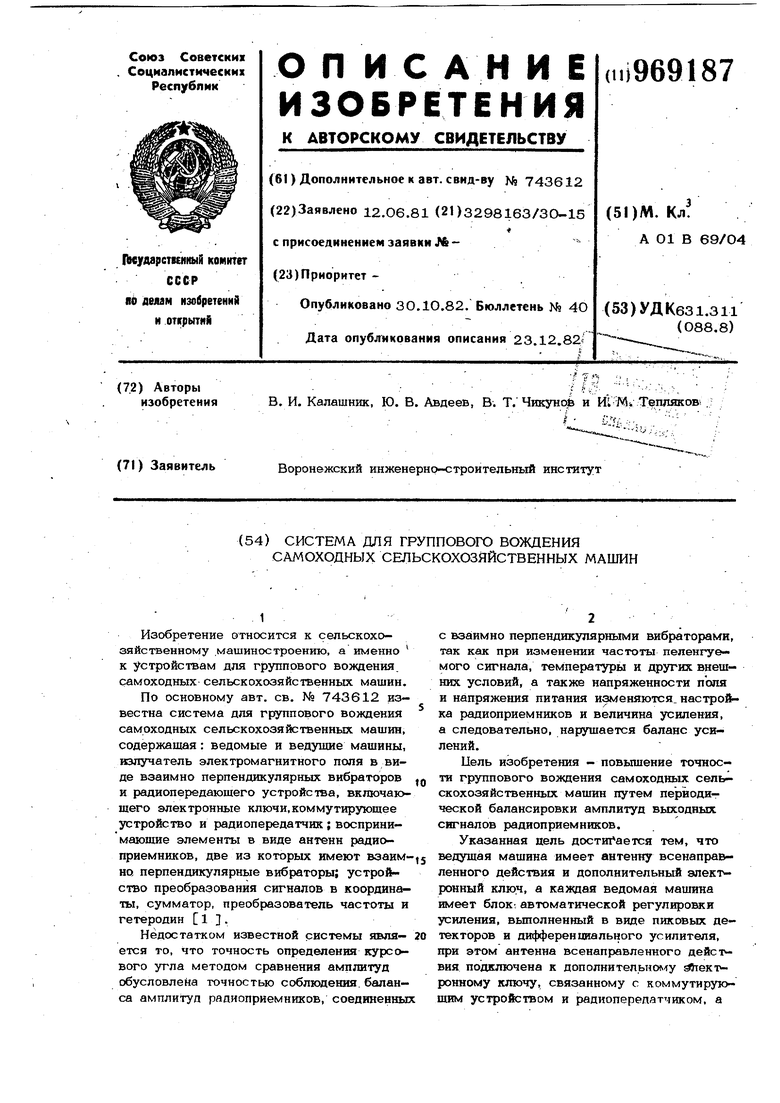
| название | год | авторы | номер документа |
|---|---|---|---|
| Система для группового вожденияСАМОХОдНыХ СЕльСКОХОзяйСТВЕННыХМАшиН | 1979 |
|
SU818518A1 |
| Устройство для группового вождения самоходных машин | 1985 |
|
SU1308221A1 |
| Система для группового вождения самоходных сельскохозяйственных машин | 1978 |
|
SU743612A1 |
| СПОСОБ УПРАВЛЕНИЯ ГРУППОВЫМ ВОЖДЕНИЕМ МАШИН | 1999 |
|
RU2172085C2 |
| Система для группового вождения самоходных сельскохозяйственных машин | 1984 |
|
SU1197573A1 |
| Система для группового вождения самоходных сельскохозяйственных машин | 1984 |
|
SU1192658A1 |
| Система для группового вождения самоходных сельскохозяйственных машин | 1987 |
|
SU1531874A1 |
| Система группового управления самоходными агрегатами | 1982 |
|
SU1061716A2 |
| Система для группового вождения самоходных сельскохозяйственных машин | 1985 |
|
SU1301332A2 |
| ФАЗОВАЯ РАЗНОСТНО-ГИПЕРБОЛИЧЕСКАЯ КООРДИНАТО- | 1965 |
|
SU176130A1 |
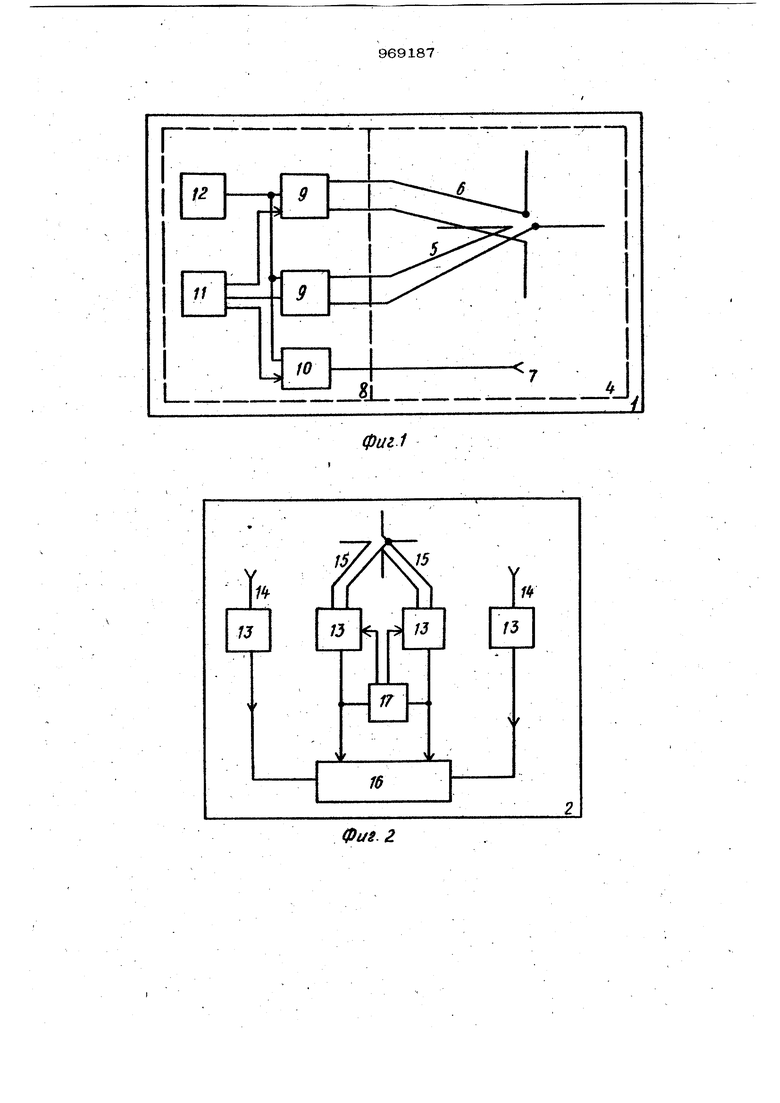
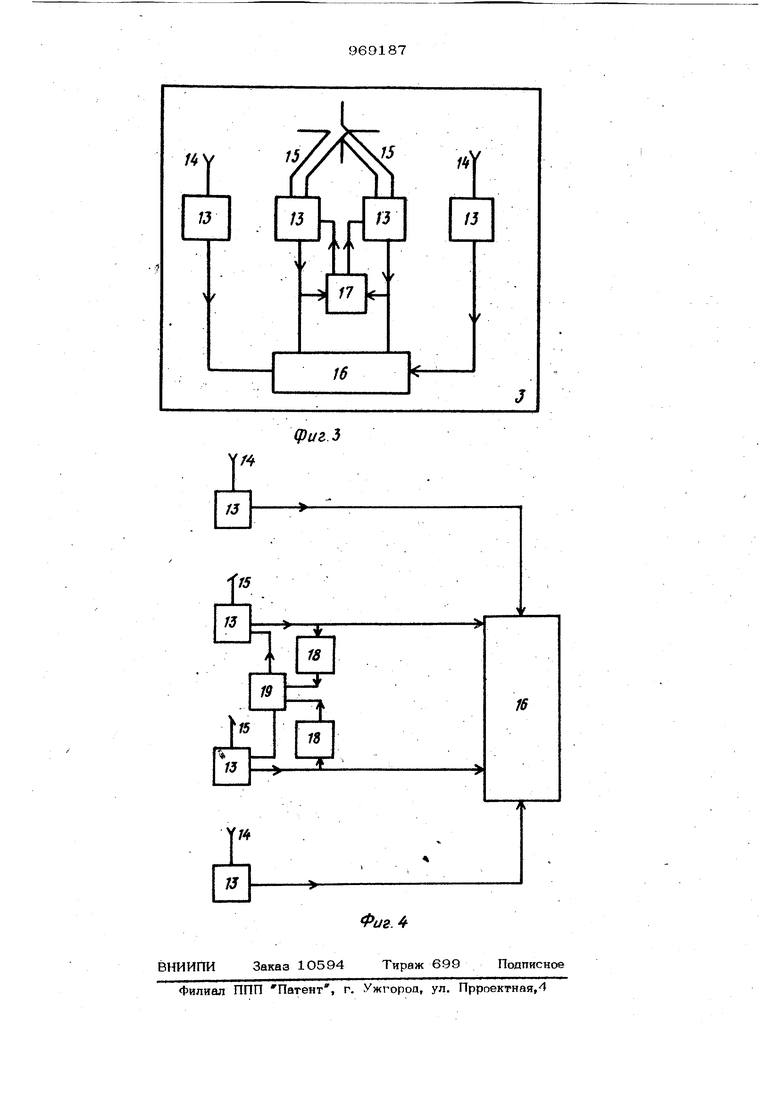
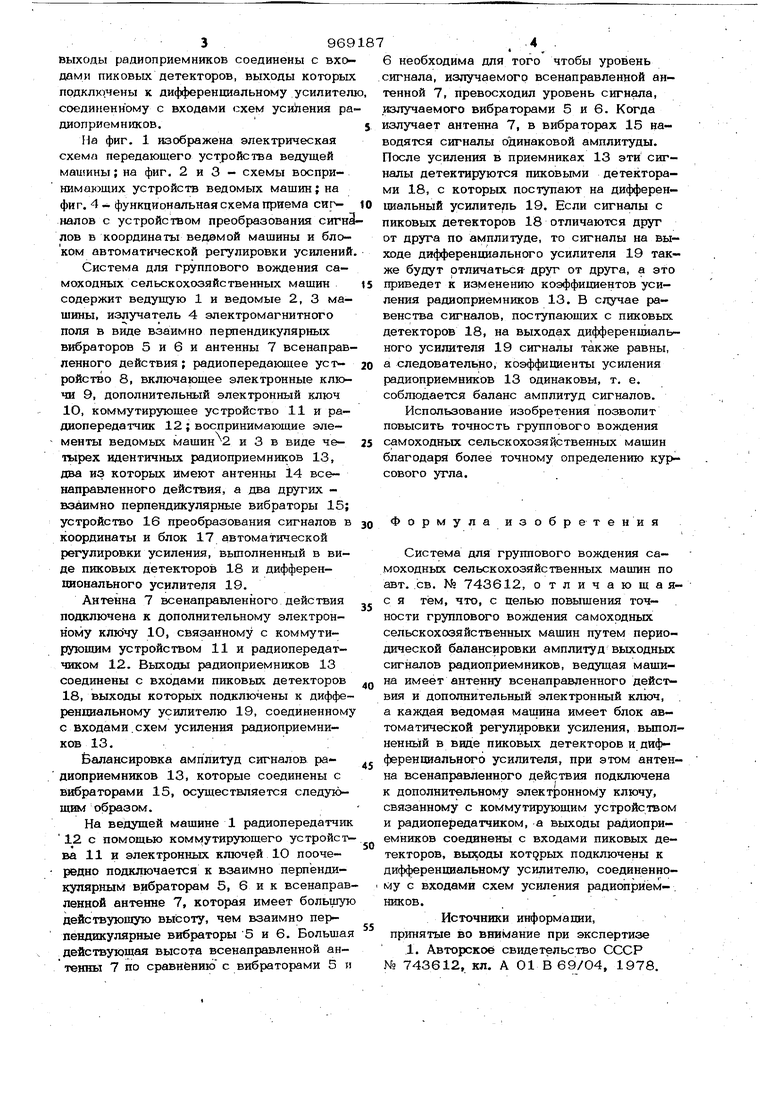
Изобретение относится к сельскохозяйственному .машиностроению, а именно к устройствам для группового вождения, самоходных сельскохозяйственных машин. По основному авт. св. № 743612 известна система для группового вождения самоходных сельскохозяйственных машин, содержащая: ведомые и ведущие машины, излучатель электромагнитного поля в виде взаимно перпендикулярных вибраторов и радиопередающего устройства, включак щего электронные ключи, комму тирующее устройство и радиопередатчик ; воспринимающие элементы в виде антенн радиоприемников, две из которых имеют взаимно перпенхшкулярные вибраторы; устройство преобразования сигналов в координаты, сумматор, преобразователь частоты и гетеродин 1 }. Недостатком известной системы явля- ется то, что точность определения курсового угла методом сравнения амплитуд обусловлена точностью соблюдения баланса амплитуд радиоприемников, соединенны с взаимно перпендикулярными вибраторами, так как при изменении частоты пеленгуемого сигнала, температуры и других внешних условий, а также напряженности поля и напряжения питания изменяются, настройка радиоприемников и величина усиления, а следовательно, нарушается баланс усилений. Цель изобретения - повышение точности группового вождения самоходных сельгскохозяйственных машин путем периодической балансировки амплитуд выходных сигналов радиоприемников. Указанная цель дости1 ается тем, что ведущая машина имеет антенну всенаправленного действия и дополнительный эяект ронныЙ ключ, а каждая ведомая машина имеет блок; автоматической регулировки усиления, выполненный в виде пиковых детекторов и дифференциального усилителя, при этом антенна всенаправлэнного дейст ВИЯ подключена к дополни тел екрронному ключу, связанному с коммутирующим устройством и радиопередатчиком, а выходы радиоприемников соединены с входами пиковых детекторов, выходы которых подключены к дифференциальному усилителю, соединенному с входами схем усиления радиоприемников. На фиг, 1 изображена электрическая схема передающего устройства ведущей машины; на фиг. 2 и 3 - схемы воспринимающих устройств ведомых мащин ; на фиг. 4. функциональная схема приема сиг- ю налов с устройством преобразования сигнЗлов в координаты ведамой машины и бло- ком автоматической регулировки усилений. Система для группового вождения са- моходных сельскохозяйственных мащин is содержнт ведущую 1 и ведомые 2, 3 машины, излучатель 4 электромагнитного поля в виде взаимно перпендикулярных вибраторов 5 и 6 и антенны 7 всенаправленного действия; радиопередающее уст- 20 ройство 8, включающее электронные ключи 9, дополнительный электронный ключ 1О, коммутирующее устройство 11 и радиопередатчик 12; воспринимающие элементы ведомых машин 2 и 3 в виде четырех идентичных радиоприемников 13, два из которых имеют антенны 14 всенаправленного действия, а два других взаимно перпендикулярные вибраторы 15; устройство 16 преобразования сигналов в jg координаты и блок 17 автоматической регулировки усиления, вьшолненный в виде пиковых детекторов 18 и дифферендионального усилителя 19. Антенна 7 всенаправленного действия подключена к дополнительному электронному ключу 10, связанному с коммутирующим устройством 11 и радиопередатчиком 12. Выходы радиоприемников 13 соединены с входами пиковых детекторов 18, выходы которых подключены к дифференциальному усилителю 19, соединенному с входам и. схем усиления радиоприемников 13. Ёалансировка амплитуд сигналов радиоприемников 13, которые соединены с вибраторами 15, осуществляется следующим образом. На ведущей машине 1 радиопередатчик 12 с помощью коммутирующего ycтpoйc ва 11 и электронных ключей 10 поочередно подключается к взаимно перпендикулярным вибраторам 5, 6 и к всенаправленной антенне 7, которая имеет большую действующую высоту, чем взаимно перпендикулярные вибраторы 5 и 6. Большая действующая высота всенаправленной антенны 7 по сравнению с вибраторами 5 и 5 25 б необходима для того чтобы уровень сигнала, излучаемого всенаправленной аитемной 7, превосходил уровень сигнала, излучаемого вибраторами 5 и 6. Когда излучает антенна 7, в вибраторах 15 наводятся сигналы одинаковой амплитуды. После усиления в приемниках 13 эти сигналы детектируются пиковыми детекторами 18, с которых поступают на дифференциальный усилитесь 19. Если сигналы с пиковых детекторов 18 отличаются друг от друга по амплитуде, то сигналы на вы- ходе дифференциального усилителя 19 также будут отличаться- друг от друга, а это приведет к изменению коэффициентов усиления радиоприемников 13. В случае равенства сигналов, поступающих с пиковых детекторов 18, на выходах дифферендиального усилителя 19 сигналы также равны, а следовательно, коэффициенты усиления радиоприемников 13 одинаковы, т, е. соблюдается баланс амплитуд сигналов. Использование изобретения позволит повысить точность группового вождения самоходных сельскохозяйственных мащин благодаря более точному определению курсового угла. Формула изобретения Система для группового вождения самоходных сельскохозяйственных машин по авт. .св. NO 743612, отличающаяс я тем, что, с целью повышения точности группового вождения самоходных сельскохозяйственных машин путем периодической балансировки амплитуд выходных сигналов радиоприемников, ведущая машина имеет антенну всенаправленного действия и дополнительный электронный ключ. а каждая ведомая машина имеет блок автоматической регулировки усиления, вьшолненнь1Й в виде пиковых детекторов и дифференциального усилителя, при этом антенна всенаправленного действия подключена к дополнительному электронному ключу, связанному с коммутирующим устройством и радиопередатчиком, а выходы радиоприемников соединены с входами пиковых детекторов, выходы которых подключены к дифференциальному усилителю, соединенному с входами схем усиления радиоприем-. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 743612, кл. А 01 В69/О4, 1978.
Фи11
Фиг. 2
Фиг
Г
-1
18
19
1
15
18
16
