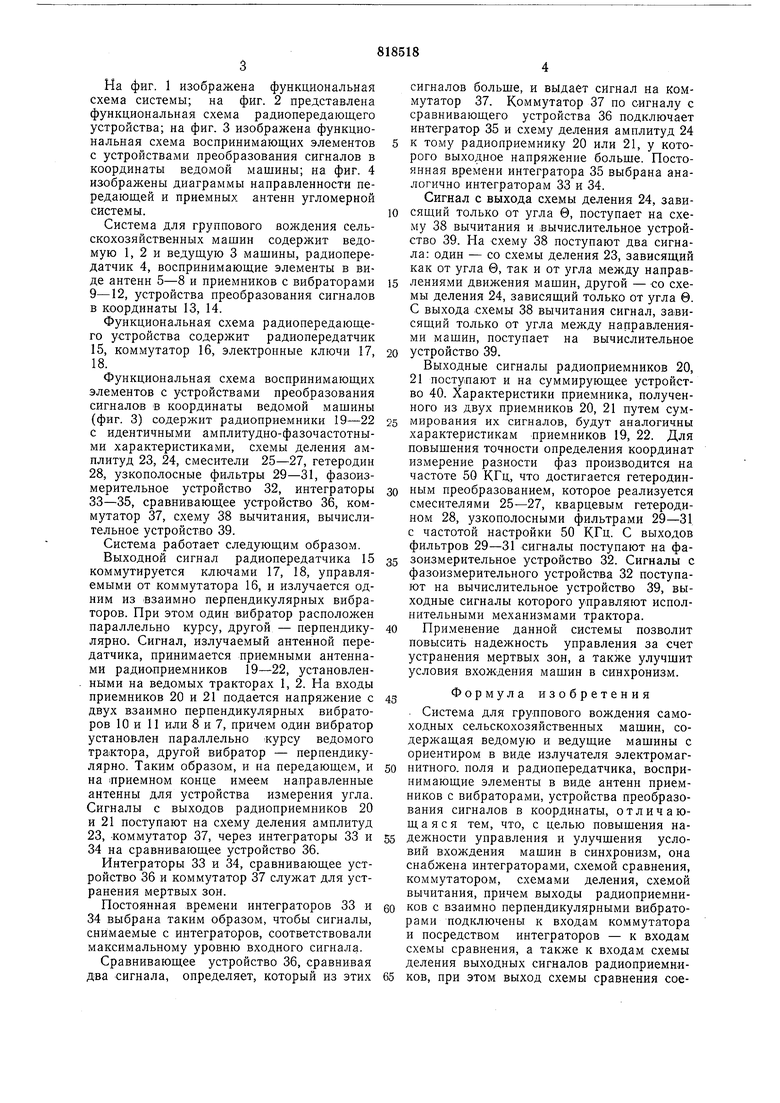
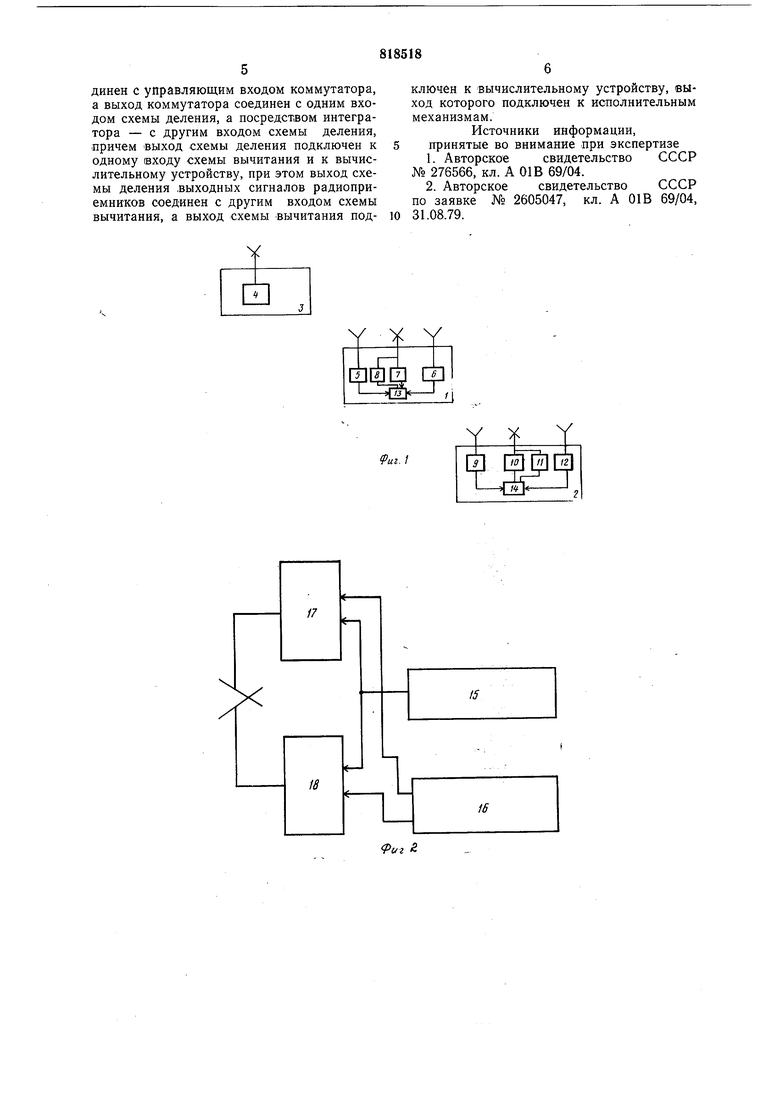
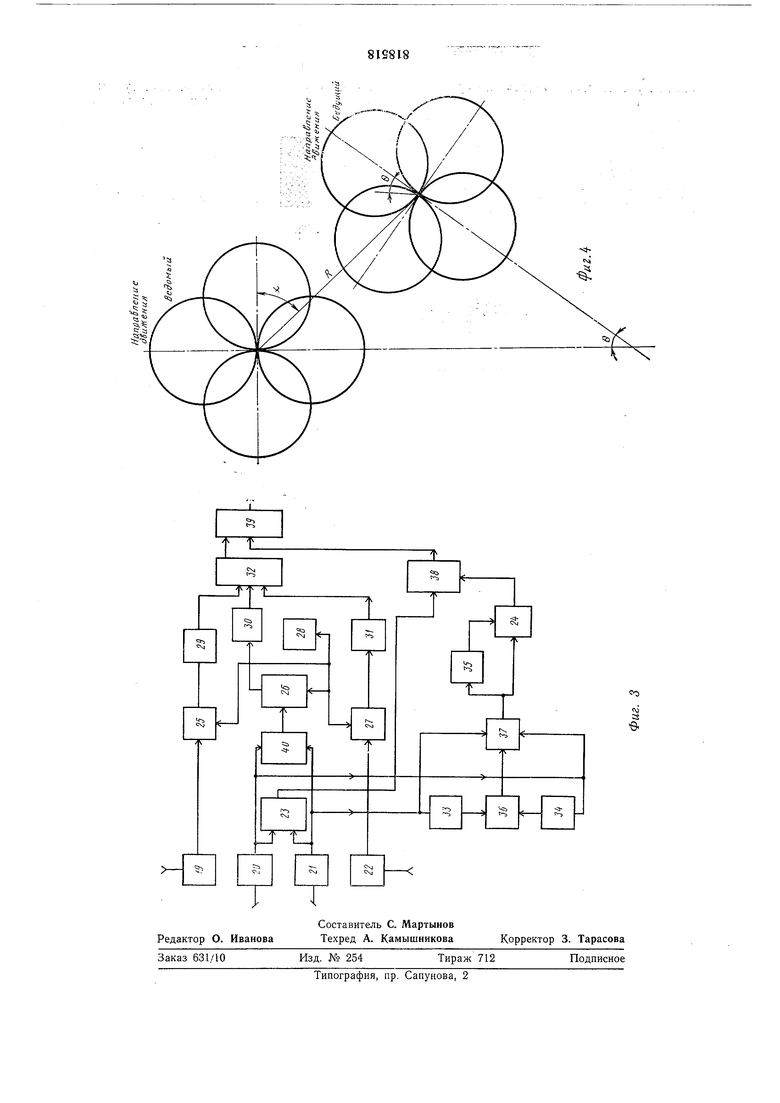
На фиг. 1 изображена функциональная схема системы; на фиг. 2 представлена функциональная схема радиопередающего устройства; на фиг. 3 изображена функциональная схема воспринимающих элементов с устройствами преобразования сигналов в координаты ведомой машины; на фиг. 4 изображены диаграммы направленности передающей и приемных антенн угломерной системы.
Система для группового вождения сельскохозяйственных машин содержит ведомую 1, 2 и ведущую 3 мащины, радиопередатчик 4, воспринимающие элементы в виде антенн 5-8 и приемников с вибраторами 9-12, устройства преобразования сигналов в координаты 13, 14.
Функциональная схема радиопередающего устройства содержит радиопередатчик 15, коммутатор 16, электронные ключи 17, 18.
Функциональная схема воспринимающих элементов с устройствами преобразования сигналов в координаты ведомой мащины (фиг. 3) содержит радиоприемники 19-22 с идентичными амплитудно-фазочастотными характеристиками, схемы деления амплитуд 23, 24, смесители 25-27, гетеродин 28, узкополосные фильтры 29-31, фазоизмерительное устройство 32, интеграторы 33-35, сравнивающее устройство 36, коммутатор 37, схему 38 вычитания, вычислительное устройство 39.
Система работает следующим образом.
Выходной сигнал радиопередатчика 15 коммутируется ключами 17, 18, управляемыми от коммутатора 16, и излучается одним из взаимно перпендикулярных вибраторов. При этом один вибратор расположен параллельно курсу, другой - перпендикулярно. Сигнал, излучаемый антенной передатчика, принимается приемными антеннами радиоприемников 19--22, установленными на ведомых тракторах 1, 2. На входы приемников 20 и 21 подается напряжение с двух взаимно перпендикулярных вибраторов 10 и 11 или 8 и 7, причем один вибратор установлен параллельно -курсу ведомого трактора, другой вибратор - перпендикулярно. Таким образом, и на передающем, и на приемном конце имеем направленные антенны для устройства измерения угла. Сигналы с выходов радиоприемников 20 и 21 поступают на схему деления амплитуд 23, -коммутатор 37, через интеграторы 33 и 34 на сравнивающее устройство 36.
Интеграторы 33 и 34, сравнивающее устройство 36 и коммутатор 37 служат для устранения мертвых зон.
Постоянная времени интеграторов 33 и 34 выбрана таким образом, чтобы сигналы, снимаемые с интеграторов, соответствовали максимальному уровню входного сигнала.
Сравнивающее устройство 36, сравнивая два сигнала, определяет, который из этих
сигналов больше, и выдает сигнал на коммутатор 37. Коммутатор 37 по сигналу с сравнивающего устройства 36 подключает интегратор 35 и схему деления амплитуд 24
к тому радиоприемнику 20 или 21, у которого выходное напряжение больше. Постоянная времени интегратора 35 выбрана аналогично интеграторам 33 и 34. Сигнал с выхода схемы деления 24, зависящий только от угла в, поступает на схему 38 вычитания и вычислительное устройство 39. На схему 38 поступают два сигнала: один - со схемы деления 23, зависящий как от угла в, так и от угла между направлениями движения машин, другой - со схемы деления 24, зависящий только от угла 0. С выхода схемы 38 вычитания сигнал, зависящий только от угла между направлениями мащин, поступает на вычислительное
устройство 39.
Выходные сигналы радиоприемников 20, 21 поступают и на суммирующее устройство 40. Характеристики приемника, полученного из двух приемников 20, 21 путем суммирования их сигналов, будут аналогичны характеристикам приемников 19, 22. Для повыщения точности определения координат измерение разности фаз производится на частоте 50 КГц, что достигается гетеродинным преобразованием, которое реализуется смесителями 25-27, кварцевым гетеродином 28, узкополосными фильтрами 29-31 с частотой настройки 50 КГц. С выходов фильтров 29-31 сигналы поступают на фазоизмерительное устройство 32. Сигналы с фазоизмерительного устройства 32 поступают на вычислительное устройство 39, выходные сигналы которого управляют исполнительными механизмами трактора.
Применение данной системы позволит повысить надежность управления за счет устранения мертвых зон, а также улучшит условия вхождения мащин в синхронизм.
Формула изобретения
. Система для группового вождения самоходных сельскохозяйственных мащин, содержащая ведомую и ведущие машины с ориентиром в виде излучателя электромагнитного. поля и радиопередатчика, воспринимающие элементы в виде антенн приемников с вибраторами, устройства преобразования сигналов в координаты, отличающаяся тем, что, с целью повыщения надежности управления и улучшения условий вхождения машин в синхронизм, она снабжена интеграторами, схемой сравнения, коммутатором, схемами деления, схемой вычитания, причем выходы радиоприемников с взаимно перпендикулярными вибраторами подключепы к входам коммутатора и посредством интеграторов - к входам схемы сравнения, а также к входам схемы деления выходных сигналов радиоприемников, при этом выход схемы сравнения соединен с управляющим входом коммутатора, а выход коммутатора соединен с одним входом схемы деления, а посредством интегратора - с другим входом схемы деления, причем -выход схемы деления подключен к одному входу схемы вычитания и к вычислительному устройству, при этом выход схемы деления .выходных сигналов радиоприемников соединен с другим входом схемы вычитания, а выход схемы вычитания подключей к вычислительному устройству, выход которого подключен к исполнительным механизмам.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 276566, кл. А 01В 69/04.
2.Авторское свидетельство СССР по заявке № 2605047, кл. А 01В 69/04, 31.08.79.
fuz.J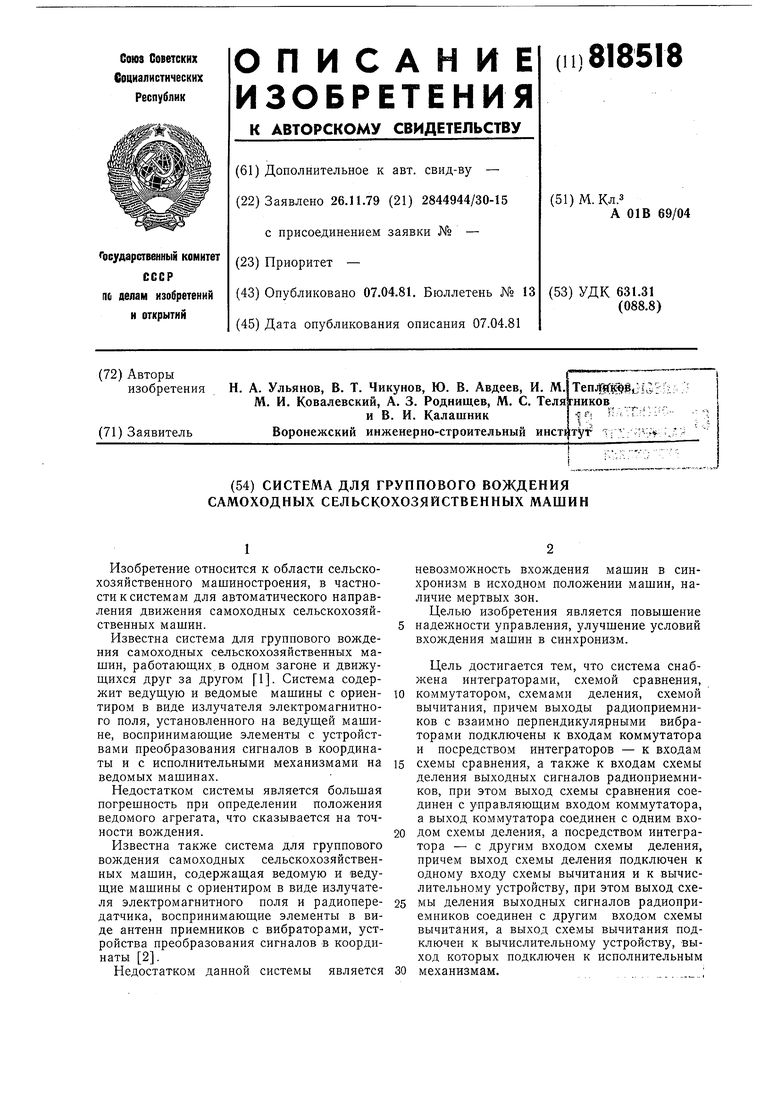
| название | год | авторы | номер документа |
|---|---|---|---|
| Система для группового вождения самоходных сельскохозяйственных машин | 1978 |
|
SU743612A1 |
| Система для группового вождения самоходных сельскохозяйственных машин | 1981 |
|
SU969187A2 |
| Устройство для группового вождения самоходных машин | 1985 |
|
SU1308221A1 |
| СПОСОБ УПРАВЛЕНИЯ ГРУППОВЫМ ВОЖДЕНИЕМ МАШИН | 1999 |
|
RU2172085C2 |
| Система для группового вождения самоходных сельскохозяйственных машин | 1984 |
|
SU1192658A1 |
| Система для группового вождения самоходных сельскохозяйственных машин | 1984 |
|
SU1197573A1 |
| УСТРОЙСТВО ДЛЯ ПРИВЯЗКИ ШКАЛ ВРЕМЕНИ | 1992 |
|
RU2046393C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ЛЮДЕЙ ПОД ЗАВАЛАМИ И ПОИСКА ВЗРЫВЧАТЫХ И НАРКОТИЧЕСКИХ ВЕЩЕСТВ | 2013 |
|
RU2526588C1 |
| Устройство прерывистой радиосвязи | 1989 |
|
SU1748263A1 |
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ ДОПЛЕРОВСКОЙ ЧАСТОТЫ | 1990 |
|
RU2231085C2 |
X
х
15
