Известные конструкции летучих пил к прокатным станам, предназначенные, в частности, для разрезания труб и профилей сложного сечения, обладают рядом недостатков. К ним относится возможность отрезания профилей только одной определенной длины, значительные отклонения этой длины от номинальной и т. п.
Описываемая летучая пила с кареткой, перемещаемой механическим приводом, жестко связанным с приводом подачи разрезаемых профилей, свободна от этих недостатков. Отличительная особенность этой пилы заключается в том, что для приведения в движение ее каретки применен кулачковый привод. Управление последним осуществляется посредством системы сельсинов, связанной с дифференциальным механизмом привода. Применение такого привода обеспечивает возможность регулирования длины разрезаемых профилей, а также повышение ее точности.
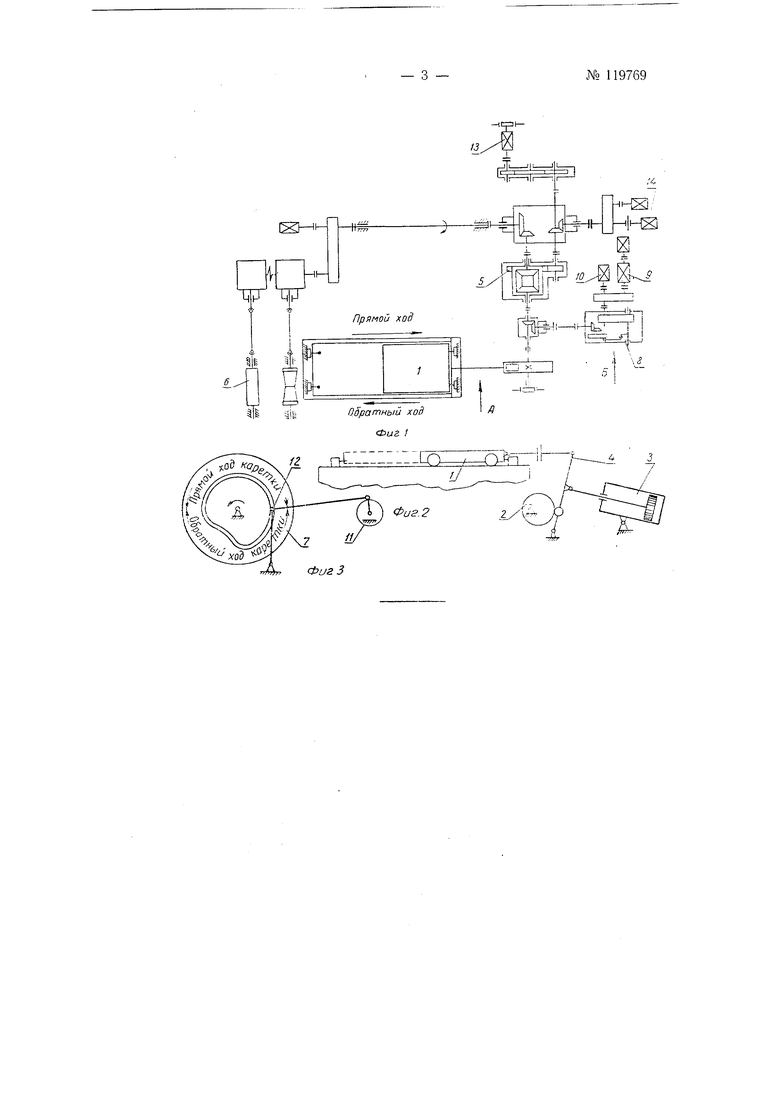
На фиг. 1 изображена кинематическая схема привода каретки летучей пилы; на фиг. 2 и 3 соответственно изображены виды по стрелкам Л и на фиг. 1.
Предлагаемая летучая пила состоит в основном из возвратно-поступательно движущейся каретки и привода ее движения. На каретке установлен режущий механизм, обеспечивающий вращение режущего диска и внедрение его в металл при разрезании.
Механизм привода движения каретки / содержит кулачок 2, при повороте которого осуществляется ее прямой ход в направлении движения резрезаемого профиля. При обратном ходе перемещение каретки осуществляется посредством пневматического цилиндра 3, прижимающего к вращающемуся кулачку 2 рычаг 4. Кинематическая цепь от первого ролика формовочного стана (при зажатых первых гладких роликах их окружная скорость равна скорости профиля в стане) до вала кулачка 2 приводного механизма рассчитана следующим образом. При неподвиж№ 119769
пой обойме, несущей сателлиты дифференциального .механизма о, за один оборот кулачка через первую клеть 6 стана проходит профиль минимальной длины (из диапазона отрезаемых длин), а скорости движения профиля и каретки на участке равномерного движения равны. Отрезание профилей любых других длин (больших минимальной) основано на жесткой синхронизации скорости движения профиля и каретки /. При этом обойма дифференциального механизма оетается неподвижной во время прямого хода и поворачивается на определенный угол при обратном ходе, замедляя вращение кулачка. Угол поворота обоймы прямо пропорционален приращению длины отрезаемого профиля. Остановка обоймы при прямом ходе (резе) и поворот ее на строго определенный угол при обратном ходе каретки осуществляется следующим образом. Вал привода кулачка 2 приводит во вращение вспомогательный кулачок 7, установленный в редукторе 8. Одновременно двигатель 9 стремится повернуть сельсип-датчик 10 и через коробку скоростей - кривощип 11 в редукторе 8, поджимая ролик 12 к фигурному пазу кулачка 7. Этот кулачок спрофилирован и установлен таким образом, что во время прямого хода каретки кривощип // не может повернуться, следовательно, двигатель 9 и сельсин-датчик 10 неподвижны, а во время ее обратного хода кривошип может сделать точно один оборот. Устанавливая между валом кривощипа 11 и валом сельсина-датчика 10 определенное передаточное число, можно получить различные углы поворота сельсина-датчика за время обратного хода каретки 1. При этом схема управления двигателем 13 обеспечивает поворот сельеика-приемника 14 и вместе с ним поворот обоймы дифференциального механизма 5 па заданный сельсином-датчиком угол, снижая тем самым скорость обратного хода каретки. При обрабатывании заданного угла (при повороте обоймы и сельсии.-прпемника) на сельсип-датчик пакладывается отрицательная обратпая связь, способствующая стабилизации процесса отработки угла поворота обоймы дифференциала.
Предмет и з о б р е т ен и я
Летучая пила к прокатиому стану, снабженная механичееким прлзодом, жестко связанным с приводом подачи разрезаемого профиля, отличающаяся тем, что, с целью обеснечения возможности регулирования длины разрезаемых профилей и повышения ее точности, для приведения в движение каретки, несущей режущий механизм, применен ку.;ачковый привод, управляемый системой сельсинов, связанной с дифференциальным механизмом привода.
13
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления электроприводом летучих отрезных механизмов прокатных станов | 1975 |
|
SU531577A1 |
| Привод каретки летучей пилы | 1975 |
|
SU541603A1 |
| Способ получения труб и прокатный стан для его осуществления | 1960 |
|
SU136297A1 |
| Летучие ножницы | 1977 |
|
SU742054A1 |
| ЛЕТУЧАЯ ПИЛА ДЛЯ РЕЗКИ ТРУБ НА НЕПРЕРЫВНЫХ ТРУБОСВАРНЫХ СТАНАХ | 1954 |
|
SU110071A1 |
| УСТРОЙСТВО ДЛЯ РЕЗКИ ДВИЖУЩИХСЯ ТРУБ | 1997 |
|
RU2130363C1 |
| СПОСОБ РЕЗКИ НЕПРЕРЫВНО ДВИЖУЩИХСЯ СВАРНЫХ ПРЯМОШОВНЫХ ТРУБ НА МЕРНЫЕ ДЛИНЫ И ЛЕТУЧАЯ ЗУБЧАТАЯ ДИСКОВАЯ ПИЛА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2550065C2 |
| УСТАНОВКА ДЛЯ ИСПЫТАНИЯ ПАРЫ СУХОГО ТРЕНИЯ НА ИЗНОС ПРИ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОМ ДВИЖЕНИИ | 2020 |
|
RU2745799C1 |
| Летучая пила | 1973 |
|
SU550246A1 |
| Летучие ножницы | 1987 |
|
SU1461589A1 |
MIЦГ Ф
lin
AX linjipi --- JI-uiji H4
