15
HJ,
со о
ГС
00 СС)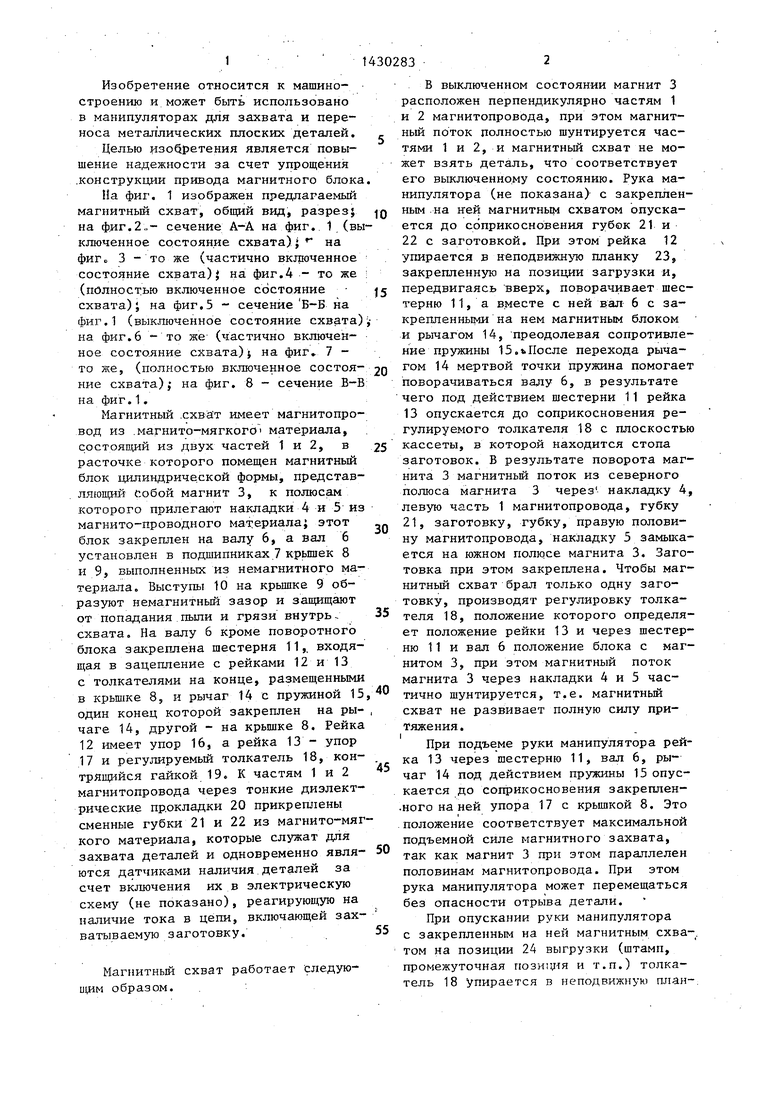
| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1990 |
|
SU1729740A1 |
| Автомат для изготовления двухветвевых пружин с отогнутыми концами | 1982 |
|
SU1052304A1 |
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2378102C2 |
| Захватное устройство | 1986 |
|
SU1355483A1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| Манипулятор | 1988 |
|
SU1593948A1 |
| Манипулятор для замены погружного стакана на слябовой машине непрерывного литья заготовок | 2016 |
|
RU2639089C2 |
| Автоматизированный комплекс для штамповки крупногабаритных деталей | 1985 |
|
SU1324725A1 |
| Устройство для контроля и сортировки магнитов | 1987 |
|
SU1443979A1 |
| Робот к листоштамповочному прессу | 1976 |
|
SU565818A1 |
Изобретение относится к машиностроению и может быть использовано в манипуляторах для захвата и переноса металлических плоских деталей. Целью изобретения является по- вьшение надежности за счет упрощения конструкции привода поворота магнитного блока. Включение и выключение магнитного схвата, содержащего магнитный блок помещенный в расточку магнитопровода, состоящего из двух частей, каждая из которых связана с соответствующей губкой, происходит за. счет поворота магнитного блока при перемещении зубчатых реек, поворачивающих шестерню 11, жестко связанную с магнитным блоком и с подпружиненным рычагом 14. Перемещение зубчатых реек происходит при взаимодействии толкателей, установленных на этих рейках, с упорами, расположенными в рабочей зоне схвата. Для регулирования усилия захвата один из упоров установлен с возможностью регулировочного продольного перемещения. 8 ил. с 
-И -Ч
Т х
фи. 1
Изобретение относится к машиностроению и может быть использовано в манипуляторах для захвата и переноса металлических плоских деталей.
Целью изобретения является повышение надежности за счет упрощения .конструкции привода магнитного блока
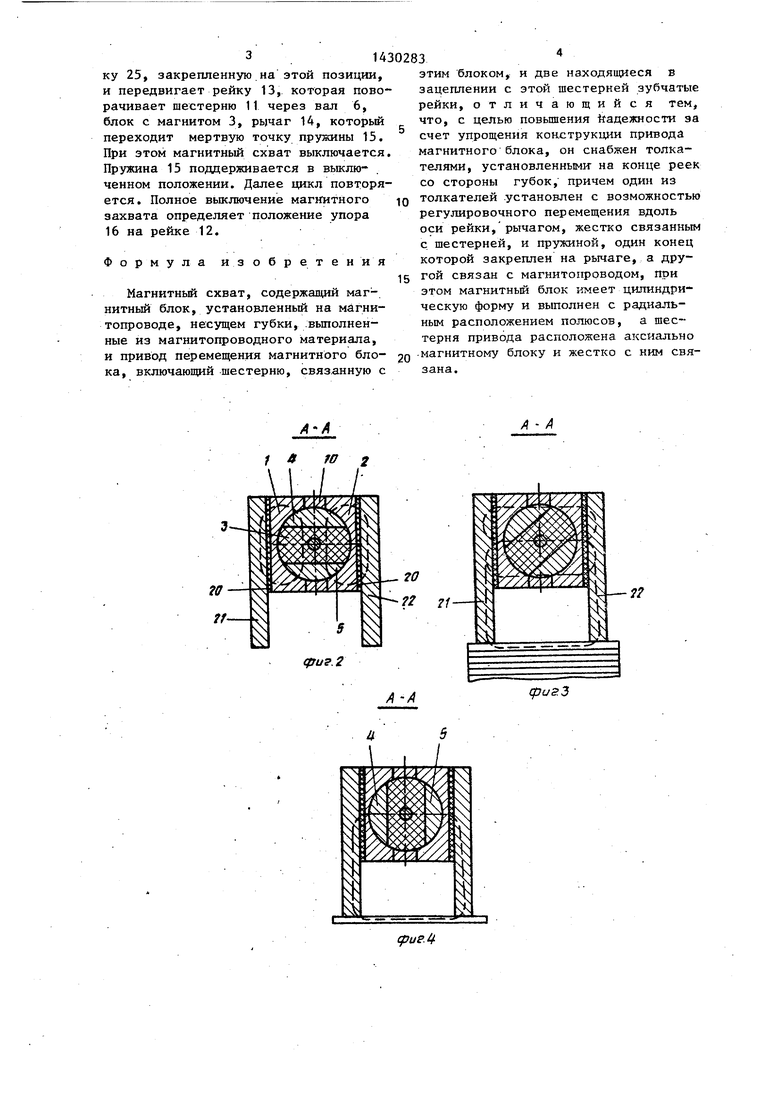
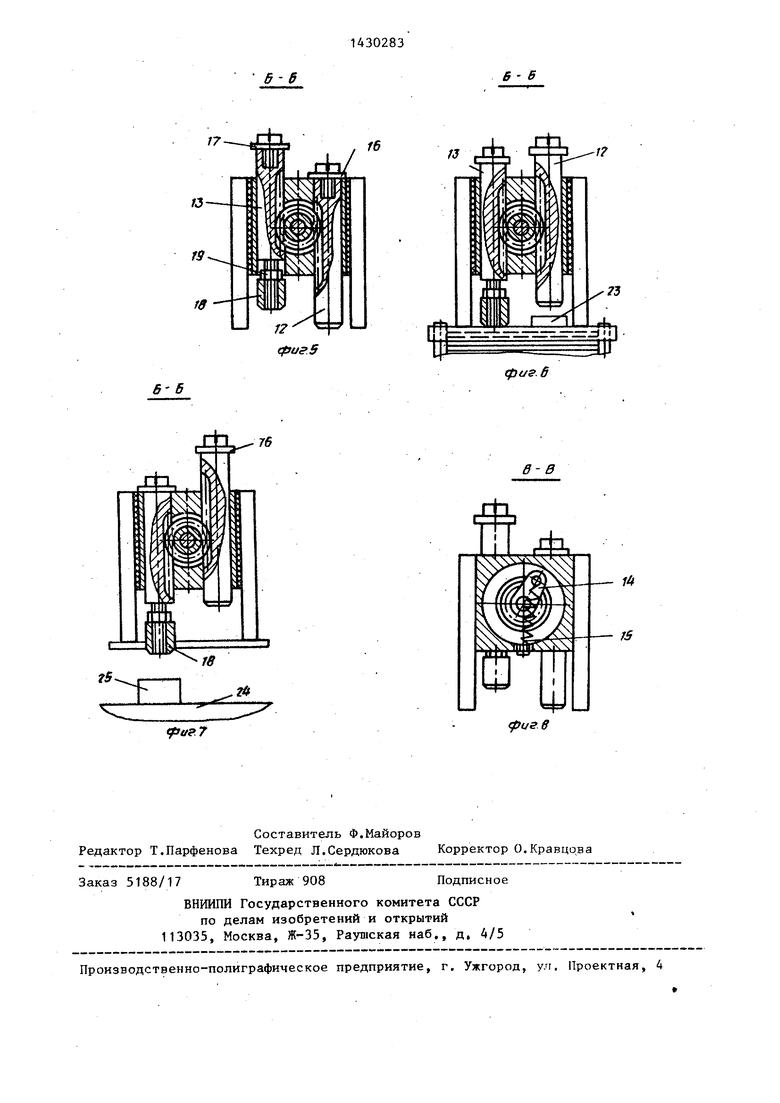
На фиг. 1 изображен предлагаемый магнитный схват, общий вид, разрез; на Ф.ИГ.2,.- сечение А-А на фиг. 1 (выключенное состояние схвата)j на фиг,; 3 - то же (частично включенное состояние схвата) на фиг.4 - то же (полностью включенное состояние схвата); на фиг.5 - сечение Б-Б на фиг.1 (выключенное состояние схвата) на фиг.6 - то же (частично включенное состояние схвата) 5 на фиг. 7 - то же, (полностью включенное состояние схвата); на фиг. 8 - сечение В-В на фиг.1.
Магнитный .схвйт имеет магнитопро- вод из .магнито-мягкого материала, состоящий из двух частей 1 и 2, в расточке которого помещен магнитный блок цилиндриче.ской формы, представ- ляЕощий Собой магнит 3, к полюсам которого прилегают накладки 4 и 5 из магнито-проводного материала; этот блок закреплен на валу 6, а вал 6 установлен в подшипниках.7 крышек 8 и 9, выполненных из немагнитного материала. Выступы 10 на крышке 9 образуют немагнитный зазор и защищают от попадания пыли и грязи внутрь схвата. На валу 6 кроме поворотного блока закреплена шестерня 11,, входящая в зацепление с рейками 12 и 13 с толкателями на конце, размещенными в крышке 8, и рычаг 14 с пружиной 15 один конец которой закреплен на ры- чаге 14, другой - на крышке 8. Рейка 12 jiMeeT упор 16, а рейка 13 - упор 17 и регулируемый толкатель 18, контрящийся гайкой 19. К частям 1 и 2 магнитопровода через тонкие диэлектрические прокладки 20 прикреплены сменные губки 21 и 22 из магнито-мяг кого материала, которые служат для захвата деталей и одновременно являются датчиками наличия деталей за счет включения их в электрическую схему (не показано), реагирующую на наличие тока в цепи, включающей захватываемую заготовку.
Магнитньй схват работает следую- uydM образом.
10
15
20
5
30
35
40
45
50
5
В выключенном состоянии магнит 3 расположен перпендикулярно частям 1 и 2 магнитопровода, при этом магнитный поток полностью шунтируется частями 1 и 2, и магнитный схват не может взять деталь, что соответствует его выключенному состоянию. Рука манипулятора (не показана)- с закрепленным на ней магнитным схватом опускается до соприкосновения губок 21 и 22 с заготовкой. При этом рейка 12 упирается в неподвижн то планку 23, закрепленную на позиции загрузки и, передвигаясь вверх, поворачивает шестерню 11, а вместе с ней вал 6 с закрепленными на нем магнитным блоком и рычагом 14, преодолевая сопротивление пружины 15.«.После перехода рычагом 14 мертвой точки пружина помогает поворачиваться валу 6, в результате чего под действием шестерни 11 рейка 13 опускается до соприкосновения регулируемого толкателя 18 с плоскостью кассеты, в которой находится стопа заготовок. В результате поворота магнита 3 магнитньй поток из северного полюса магнита 3 через накладку 4, левую часть 1 магнитопровода, губку 21, заготовку, губку, правую половину магнитопровода, накладку 5 замьиса- ется на южном полюсе магнита 3. Заготовка при этом закреплена. Чтобы магнитный схват брал только одну заготовку, производят регулировку толкателя 18, положение которого определяет положение рейки 13 и через шестерню 1 1 и вал 6 положение блока с магнитом 3, при этом магнитный поток магнита 3 через накладки 4 и 5 частично шунтируется, т.е. магнитный схват не развивает полную силу притяжения.
При подъеме руки манипулятора рейка 13 через шестерню 11, вал 6, рычаг 14 под действием пружины 15 опускается до соприкосновения закреплен- .ного на ней упора 17 с крьш1кой 8. Это положение соответствует максимальной подъемной силе магнитного захвата, так как магнит 3 при этом параллелен половинам магнитопровода. При этом рука манипулятора может перемещаться без опасности отрыва детали.
При опускании руки манипулятора с закрепленным на ней магнитным схва-. том на позиции 24 выгрузки (штамп, промежуточная и т.п.) толкатель 18 упирается в неподвижную план-.
ку 25, закрепленную на этой позиции, и передвигает рейку 13, которая поворачивает шестерню 11 через вал 6, блок с магнитом 3, рычаг 14, который переходит мертвую точку пружины 15. При этом магнитный схват выключается. Пружина 15 поддерживается в выключенном положении. Далее цикл повторяется. Полное выключение магнитного захвата определяет положение упора 16 на рейке 12.
Формула изобретения
Магнитный схват, содержащий маг-. нитный блок, установленный на магни- топроводе, несущем губки, .вьшолнен- ные из магнитопроводного материала, и привод перемещения магнитного блока, включающий шестерню, связанную с
А А t Л W 2
tpup.2
этим блоком, и две находящиеся в зацеплении с этой шестерней зубчатые рейки, отличающийся тем, что, с целью повьш1ения Надежности за счет упрощения конструкции привода магнитного блока, он снабжен толкателями, установленными- на конце реек со стороны губок, причем один из толкателей .установлен с возможностью регулировочного перемещения вдоль оси рейки, рычагом, жестко связанным с. шестерней, и пруткиной, один конец которой закреплен на рычаге, а другой связан с магнитопроводом, при этом магнитный блок цилиндрическую форму и выполнен с радиальным расположением полюсов, а шестерня привода расположена аксиально магнитному блоку и жестко с ним связана.
А А
2 21
А-А
сригЗ
б- б
17Г9
te
в- 6
tfJtfp7
В- 6
f3
1
фаг. 6
в- в
(jCfifSe
| Автоматический магнитный захват | 1982 |
|
SU1051029A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
