Данное техническое решение относится к области машиностроения и может быть использовано для автоматической сборки деталей типа вал-втулка с помощью роботов.. ;Цель изобретения - расширение функциональных возможностей и увеличение производительности за счет обеспечения сборки деталей, оси которых расположены под углом друг к другу.
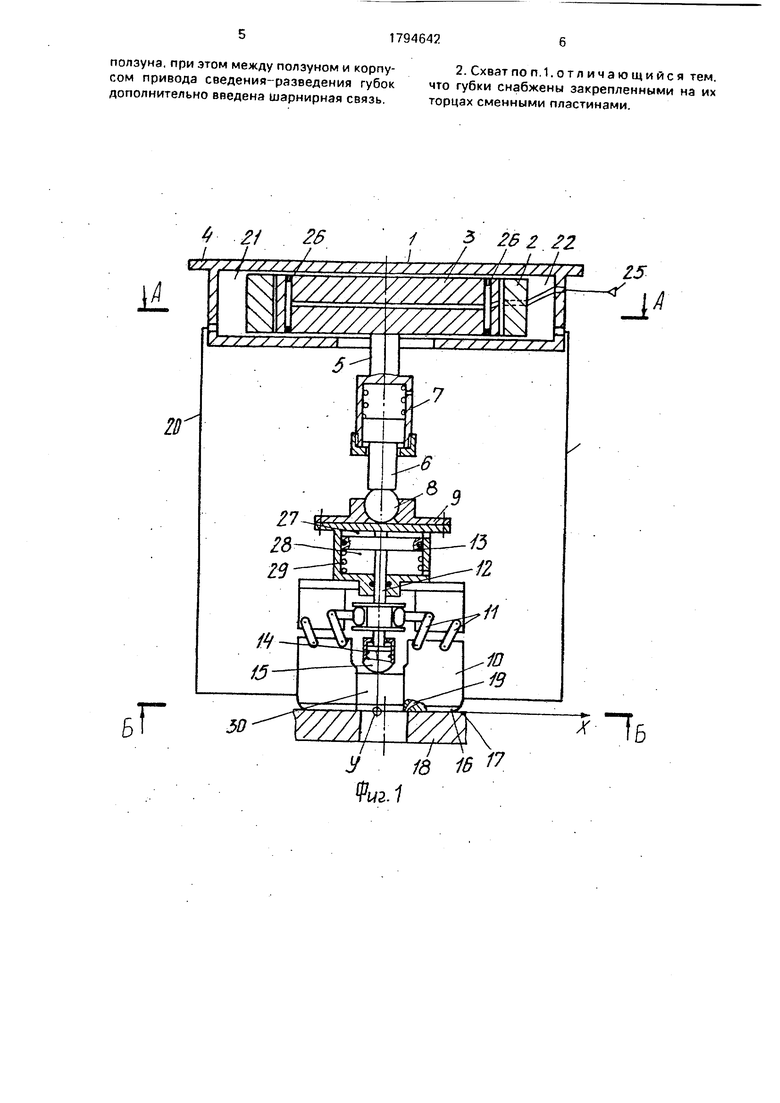
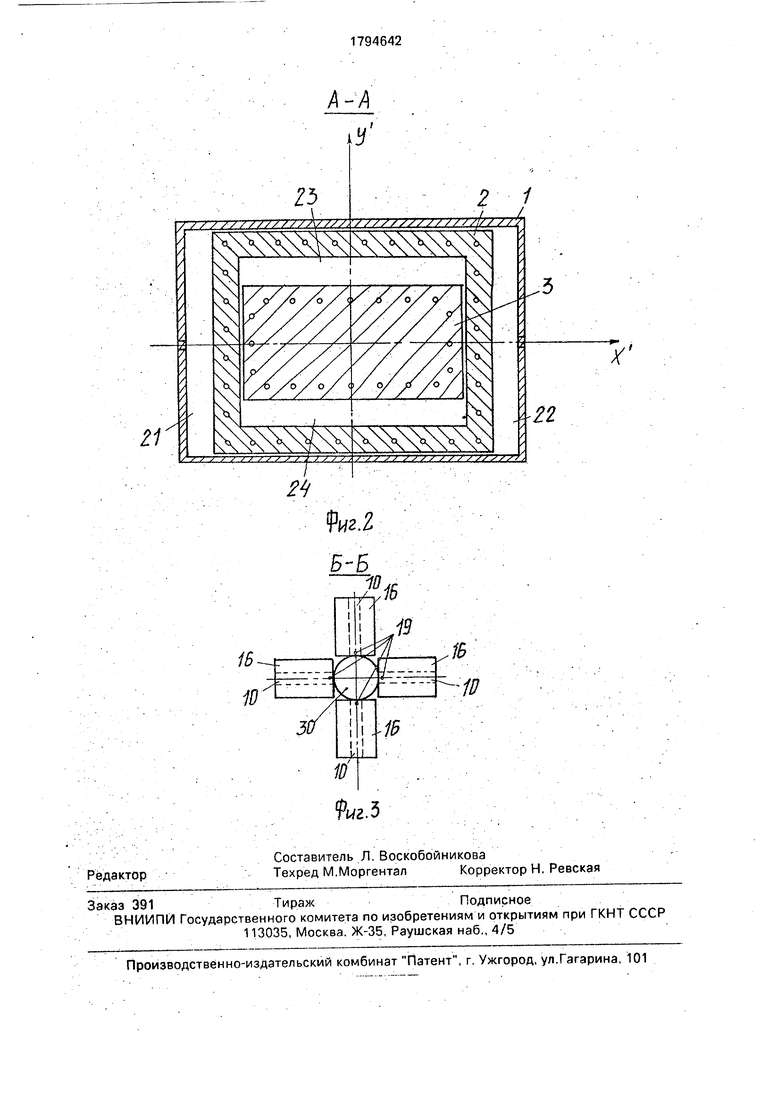
На фиг.1 представлен общий вид схва- та, разрез; на фиг.2 - разрез по А-А фиг.1; на фиг.З - разрез по Б-Б фиг.1.
Пневматический адаптивный сборочный схват содержит полый корпус 1, в котором размещены рамка 2 и плоский поршень 3, при этом рамка 2 и плоский поршень 3 имеют возможность перемещаться во взаимно перпендикулярных направлениях (рамка 2 внутри корпуса 1, поршень 3 - внутри рамки 2). Фланец 4 полого корпуса 1 закреплен на руке робота (на фиг. не показана). На плоском поршне 3 закреплено тяговое устройство, выполненное в виде направляющей втулки 5, внутри которой расположен ползун 6, подпружиненный относительно втулки 5 пружиной 7. На ползуне 6 закреплен шарнир 8, связанный с корпусом 9 пневмопривода сведения-разведения четырех губок 10. Шарнир 8 может быть установлен также между плоским поршнем 3 и втулкой 5. Губки 10 связаны рычажной системой 11 со штоком. 12 поршня 13 пневмопривода сведения-разведения губок 10. На конце штока 12 размещен подпружиненный относительно него пружиной 14 толкатель 15. На торцах губок 1.0 закреплены пластины 1(5, имеющие достаточную опорную поверхность для базирования схвата на опорной поверхности 17 приемной втулки 18. На торцах губок 10 расположены также сопла 19, связанные пневматическими линиями 20 с полостями 21,22,23,24 полого корпуса 1, образованныXI
Ю N
О
-Ьь
ю
ми полым корпусом 1, рамкой 2 и плоским поршнем 3. Магистраль 25 сжатого газа соединена с полостями 21-24 через размещенные на торцевых поверхностях рамки 2 и плоского поршня 3 мембранные дроссели 26. С магистралью 25 соединена также полость 27 корпуса 9, а в полости 28, соединенной с атмосферой, расположена пружина 29, Ось приемной втулки 18 расположена под углом к оси схвата.
Пневматический адаптивный сборочный схват работает следующим образом.
Воздух под давлением подается в полость 27, при этом поршень 13 приходит в движение, преодолевая усилие пружины 29, Приходит в движение также шток 12, который раздвигает губки 10 при помощи рычажной системы 11, Вал 30 устанавливается между губками 10. После этого полость 27 соединяется с атмосферой, при этом за счет действия пружины 29 перемещается поршень 13 и связанные с ним шток 12 и рычажная система 11, сжимая тем самым размещенный в губках 10 вал 30. Схват с зажатым валом 30 выводится к отверстию в приемной втулке 18, ось которой расположена под углом к оси схвата, а следовательно, в начальный момент и к оси вала 30. При приближении к поверхности 17 одна из пластин 16 касается поверхности 17 и при дальнейшем приближении к ней происходит поворот корпуса 9 и всех связанных с ним деталей в шарнире 8. Поворот происходит до достижения поверхности 17 остальными пластинами 16, при этом оси корпуса 9 и .закрепленного в губках 10 вала 30 становятся параллельными оси приемной втулки 18. Пружина 7 при этом сжимается, поджимая плоские пластины 16 к поверхности 17. Вал
30 при этом поджат к поверхности 17 усилием пружины 14 толкателя 15. После этого начинает работу пневматическая система компенсации несоосности осей вала 30 и втулки 18. Из-за неточности позиционирования робота точное выведение вала 30 к отверстию приемной втулки 18 с помощью робота невозможно, поэтому некоторые из сопел 19 располагаются над поверхностью
17. а другие - над отверстием приёмной втулки 18. Следовательно, сопротивление истечению воздуха из сопел 19 различно, вследствие чего возникают перепады давлений в соответствующих полостях 21-22 и
23-24. Рассмотрим подробно как осуществляется компенсация несоосности в направлении X. В полости 21, соединенной елевым (по фиг.1) соплом 19, возникает большое давление, чем в полости 22, за счет чего
рамка 2 перемещается вместе с плоским поршнем 3 и связанным с ним корпусом 9 пневмопривода сведения-разведения губок 10 вправо (по фиг.1). При этом величина несоосности вала 30 и втулки 18 уменьшается. Одновременно с этим происходит компенсация несоосности в направлении X за счет перепада давления в полостях 23 и 24. В некоторый момент несоосности в направлениях X и Y компенсируются, и оси вала 30
и втулки 18 совпадают, т.е. происходит компенсация рассогласования в плоскости 17 X - Y за счет движения рамки 2 и плоского поршня 3 в плоскости X и Y . В этот момент под действием усилия пружины .14 толкателя 15 происходит сборка, т.е. вал 30 под действием этого усилия входит в отверстие втулки 18. После этого подают давление в полость 27, за счет чего губки 10 схвата разводятся, и отводят схват в другое положение.

| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический адаптивный сборочный схват | 1989 |
|
SU1701517A1 |
| Пневматический сборочный схват | 1985 |
|
SU1404230A1 |
| Адаптивный схват | 1986 |
|
SU1395480A1 |
| Схват манипулятора для цилиндрических деталей | 1986 |
|
SU1323373A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1992 |
|
RU2008200C1 |
| Измерительный схват | 1986 |
|
SU1395481A1 |
| Измерительная захватная головка манипулятора | 1987 |
|
SU1393634A1 |
| Очувствленный схват манипулятора | 1982 |
|
SU1134361A1 |
| Очувствленный схват робота | 1986 |
|
SU1366392A1 |
| Схват | 1986 |
|
SU1390021A1 |
Изобретение относится к машиностроению и может быть использовано для автоматической сборки деталей типа вал-втулка с помощью роботов. Цель изобретения - расширение функциональных возможностей. С этой целью в известном схвате тяговое устройство выполнено в виде подпружиненных относительно друг друга в осевом направлении ползуна и направляющей втулки, смонтированной на плоском поршне, а на торцах губок закреплены сменные пластины. Кроме того, между корпусом привода сведения - разведения четырех губок и ползуном дополнительно введена шарнирная связь. 1 з.п. ф-л.ы, 3 ил..
Формула изобретения
ведения четырех губок, расположенных в соответствующих направлениях движения рамки и плоского поршня взаимно перпендикулярных плоскостях, при этом торцы губок снабжены соплами, пневматически связанными с полостями полого корпуса, соединенными через размещенные на торцовых поверхностях рэмки и плоского поршня мембранные дроссели с магистралью сжатого газа, отличающийся тем, что, с целью расширения функциональных возможностей, тяговое устройство выполнено в виде смонтированной на плоском поршне направляющей втулки и расположенного в ней подпружиненного относительно нее
ползуна, при этом между ползуном и корпусом привода сведения-разведения губок дополнительно введена шарнирная связь.
А -А
Фиг.2
Б-Б
16- 10
Л.
V&
а
1В
| Пневматический сборочный схват | 1985 |
|
SU1404230A1 |
