Изобретение относится к робот.остроению и может быть использовано в манипуляторах как промьшшенных роботов, так и автономных исполнительных устройств, а также в атономных автоматических транспортных шйгакяцих аппаратах.
Целью изобретения является уменьшение энергозатрат, следствием которого возможно выполнение искусственной мышцы в автономном варианте, повьшение точности позиционирования смещения и обеспечение регулировки величины смещения путем вьтолнения искусственной мышцы в универсальном модульном варианте с регулировкой величин смещений в исполнительном органе в широком диапазоне регулировки.
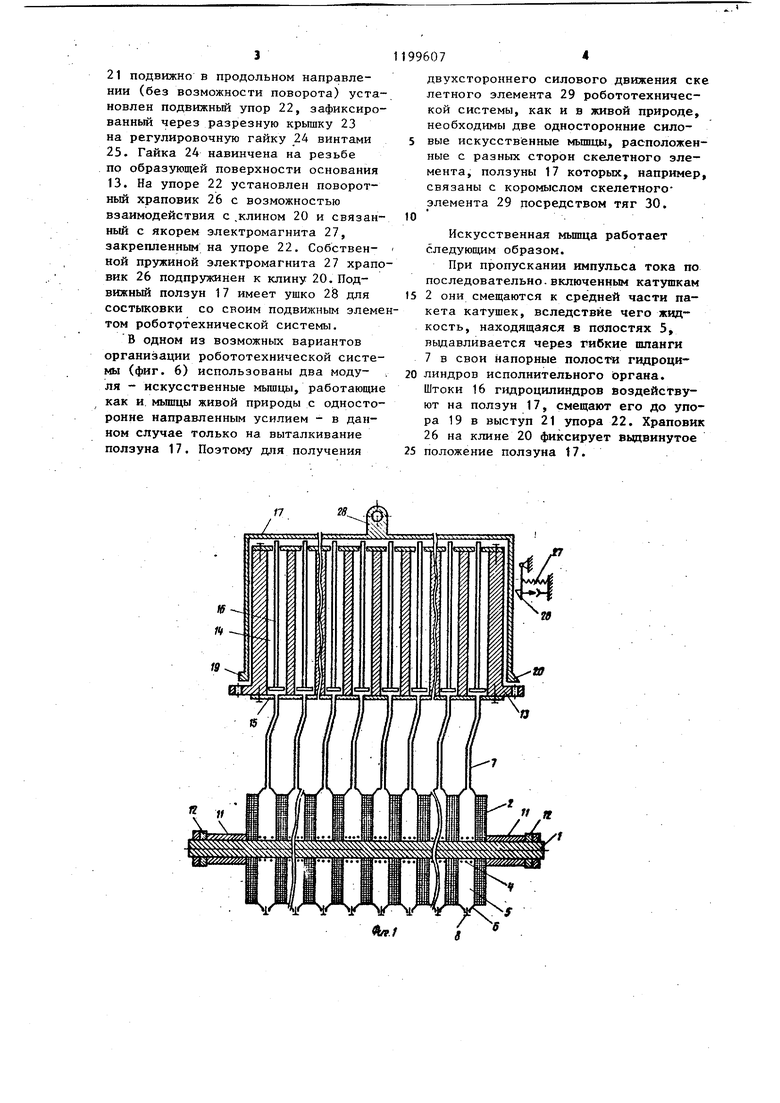
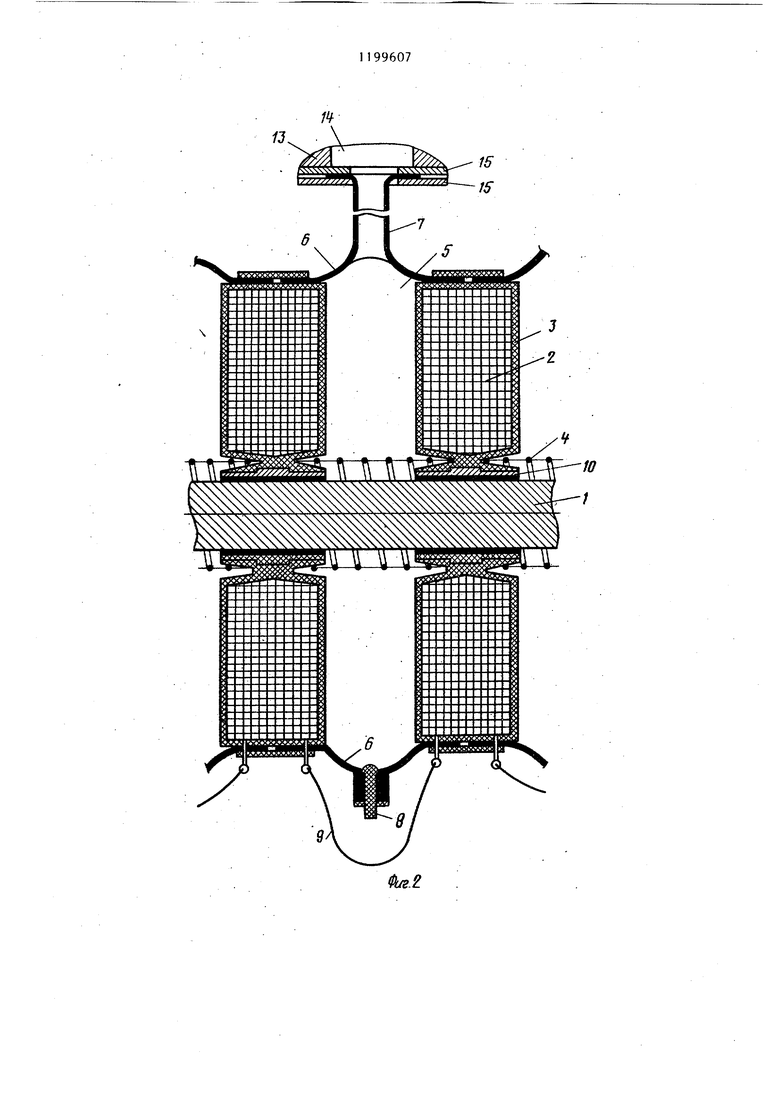
На Фиг. 1 изображена общая структурная схема искусственной мышцы, состоящей из силовой установки (внизу) и исполнительного органа (вверху) на фиг. 2 - фрагмент конструктивного выполнения силовой установки, продольный разрезу на фиг. 3 исполнительный орган, продольньй разрез, (условно показан разрез только одного из многочисленных продольных гидроцилиндров); на фиг. 4 разрез А-А на фиг. 3; на фиг. 5 разрез Б-Б на фиг. 3; на фиг. 6 один из возможных вариантов организации робототехнической системы с использованием в качестве привода предлагаемой искусственной мьппцы конструктивный модуль системы.
.Искусственная мьшца включает в себя две составляющие: силовую установку и исполнительный орган.
Силовая установка (фиг. 1 и 2) содержит магнитопровод 1, выполненный из низкоуглеродистой электротехнической стали или из железоникелевого сплава с высокой магнитной проницаемостью, на котором подвижно вдоль его осевой линии установлены несколько десятков катушек 2 (лучше выполнить нечетное число катушек, причем одну центральную катушку установить неподвижно на магнитопроводе, а все остальные - подвижно) в своих каркасах 3. Между каждыми двумя cмeжны ш катушками 2 установлены слабые пружины А, служащие для удержания катушек 2 на одинаковом расстояния одна от другой в невключенном состоянии. Между смежными катушками 2 образованы полости 5
996072
посредством эластичных кожухов 6, герметично закрепленных на образующих этих смежных катушек. Полости 5 заполнены, например, жидкостью.
J Каждая полость 5 посредством своего гибкого шланга 7 сообщается с напорной полостью своего гидродилиндра на исполнительном органе. Каждый кожух 6 имеет сливное отверстие,
to закрытое пробкой 8. Катушки 2 электрически последовательно соединены . гибкими проводами 9, а выводы крайних катушек подключены к устройству управления подачей импульсов тока .
J5 (не показано). В каждом каркасе 3 в месте скользящего сопряжения с общим магнитопроводом 1 запрессована износоустойчивая втулКа 10, выполненная из диэлектрика или .из незамкнутого электропроводящего материала (стали) во избежание появления эффекта трансформатора с короткозамкнутым витком - втулкой с разогреванием этой втулки 10 вихревыми токами.
25 По этой же причине магнитопровод Г выполнен слоеным из продольных пластин электротехнической стали или спрессован из продольных проводов электротехнической стали. Магэ нитопровод 1 может быть выполнен замкнутым по периферии катушек 2 с целью концентрации магнитного потока. Крайние катушки 2 пакета сопряжены с гладкими втулками 11, установленными с возможностью смещения вдоль магнитопровода 1, положение которых регулируется гайками 12, навинченными на концах магнитопровода 1 .
- Исполнительньй орган (фиг. 1-5) содержит основание 13 (с фланцем для крепления к .робототехнической системе) , в котором выполнены несколько десятков продольных отверстий 14 (по числу полостей между катушками одной или нескольких силовых установок) , к каждому из которых подведен гибкий шланг 7 от своей полости , 5 и зафиксирован крышками 15. В каждом отверстии 14 установлен поршень со штоком 16, образующий гидроцилиндр. Свободные концы штоков 16 сопряжены с ползуном 17, имеющим две направляющие 18, установленные подвижно в продольных пазах основания
5 13. На конце одной из направляющих 18 выполнен упор 19, а на конце второй - клин 20. Также в продольныхi пазах основания 13 своими выступами
21 подвижно в продольном направлении (без возможности поворота) установлен подвижный упор 22, зафиксированный через разрезную крьппку 23 на регулировочную гайку 24 винтами 25. Гайка 24 навинчена на резьбе по образующей поверхности основания 13. На упоре 22 установлен поворотный храповик 26 с возможностью взаимодействия с .клином 20 и связанный с якорем злектромагнита 27, закрепленным на упоре 22. Собственной пружиной электромагнита 27 храповик 26 подпружинен к клину 20. Подвижный ползун 17 имеет ушко 213 для состыковки со своим подвижным злеметом роботртехнической системы.
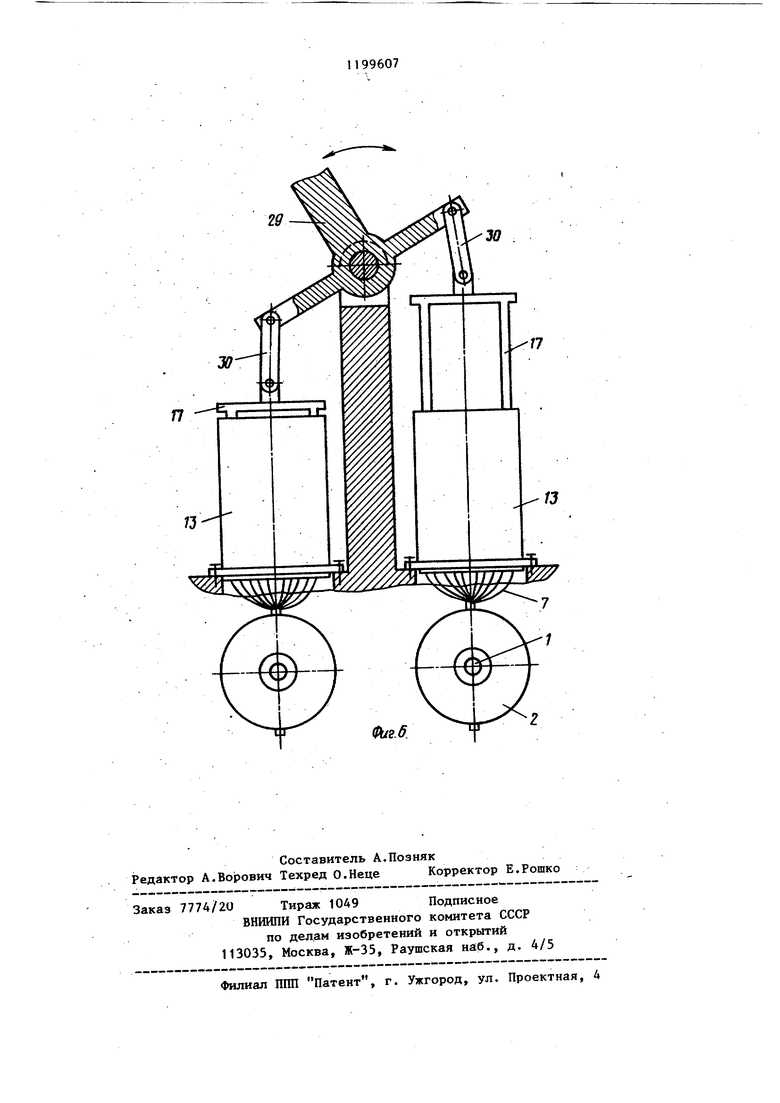
В одном из возможных вариантов организации робототехнической системы (фиг. 6) использованы два модуля - искусственные мышцы, работающие как и мьшцы живой природы с односторонне направленным усилием - в данном случае только на выталкивание ползуна 17. Поэтому для получения
двухстороннего силового движения ске летного элемента 29 робототехнической системы, как и В живой природе, необходимы две односторонние силовые искусственные мьшцы, расположенные с разных сторон скелетного элемента, ползуны 17 которых, например, связаны с коромыслом скелетного элемента 29 посредством тяг 30.
10
Искусственная мьшща работает следующим образом.
При пропускании импульса тока по последовательно.включенным катушкам
15 2 они смещаются к средней части пакета катушек, вследствие чего жидкость, находящаяся в полостях 5, вьщавливается через гибкие шланги 7 в свои напорные полости гидроци20 линдров исполнительного органа. Штоки 16 гидроцилиндров воздействуют на ползун 17, смещают его до упора 19 в выступ 21 упора 22. Храпови 26 на клине 20 фиксирует вьздвинутое
25 положение ползуна 17.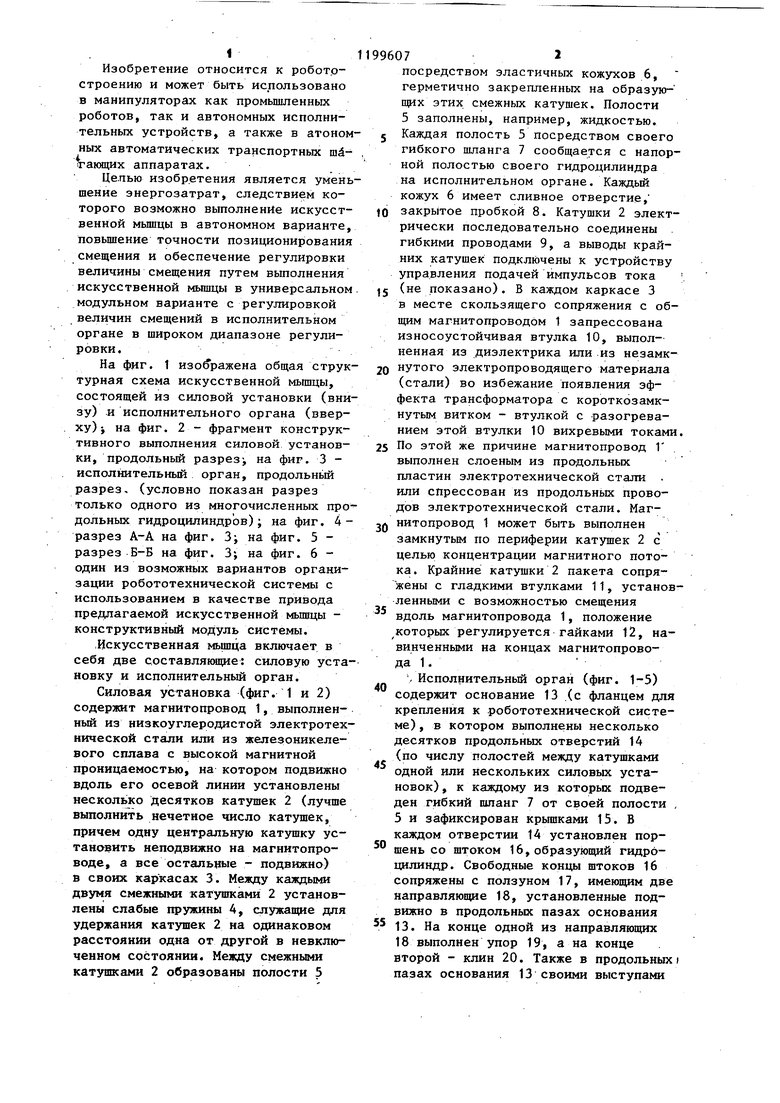
| название | год | авторы | номер документа |
|---|---|---|---|
| Искусственная мышца | 1984 |
|
SU1192967A1 |
| Устройство для управления деформациями в системе СПИД | 1982 |
|
SU1071371A1 |
| Искусственная мышца | 1989 |
|
SU1620292A1 |
| ГИДРОПУЛЬСАЦИОННЫЙ ПРЕСС | 1991 |
|
RU2010658C1 |
| Гидравлическое зажимное устройство | 1978 |
|
SU753590A1 |
| Полуавтомат для сборки пластинчатых магнитопроводов трансформаторов | 1986 |
|
SU1399827A1 |
| ПНЕВМОРАСПРЕДЕЛИТЕЛЬ | 1999 |
|
RU2164633C1 |
| КРИВОШИПНЫЙ ПРЕСС | 2005 |
|
RU2308376C2 |
| Устройство для отделения верхнего листа от стопы и подачи его к обрабатывающей машине | 1989 |
|
SU1703228A1 |
| Манипулятор | 1975 |
|
SU529072A1 |
1. ИСКУССТВЕННАЯ МЬШЩА, содержащая основание, силовую установку и исполнительный орган, о т личающаяся тем, что, с целью уменьшения энергозатрат, силовая установка выполнена в виде пакета катушек, установленных с одинаковым шагом на общем магнитопроводе, с возможностью их осевого смещения одна относительно другой, причем между смежными катушками образованы полости, герметически замкнутые эластичными кожухами, заполненные жидкостью и соединенные гибкими шлангами с соответствующими гидроцилиндрами исполнительного органа, который выполнен в виде набора изолированных гидроцилиндров, установленных в основании, штоки которых сопряжены с общим ползуном, установленным на основании с возможностью прямолинейного перемещения, 2.Мьш1ца по п. 1,отличающ а я с я тем, что, с целью повьшгения точности позиционирования смещения, ползун исполнительного органа имеет упор и клин, а на основании установлен с возможность перемещения подвижный упор с подпружиненным храповиком, взаимодействующим с клином, при этом храповик .сэязан с якорем введенного электромагнита, закрепленного на подвижном .упоре. 3.Мьшца попп. 1 и2, отлиё чающаяся тем, что, с цепью обеспечения регулировки величины смещения ползуйа, наружная поверхность основания снабжена резьбой, на которой установлена регулировочная с гайка подвижного упора, а на обоих концах магнитопровода силовой установки также установлены гайки, взаимодействующие через втулки с соответсо со ствукяцими катушками, причем « каждом эластичном кожухе выполнено сливное Од отверстие, закрытое пробкой.
П
/
Фие.З
Фиг. Ц
2д
30
17
| Люсьен Жерарден | |||
| Бионика, М.: Мир | |||
| Устройство станционной централизации и блокировочной сигнализации | 1915 |
|
SU1971A1 |
| Камневыбирательная машина | 1921 |
|
SU222A1 |
