Изобретение относится к робототехнике, в частности к пьезоэлектрическим устройствам точного позиционирования, и может быть использовано сканирующих и анализирующих устройствах оптико-механических и электронных приборов, а также в прецизионных сбо- ронных и технологических приборах для разных областей техники.
Цель изобретения - улучшение динамических характеристик и обеспечение универсальности, за счет полу- ,чения дополнительньк степеней подвижности.
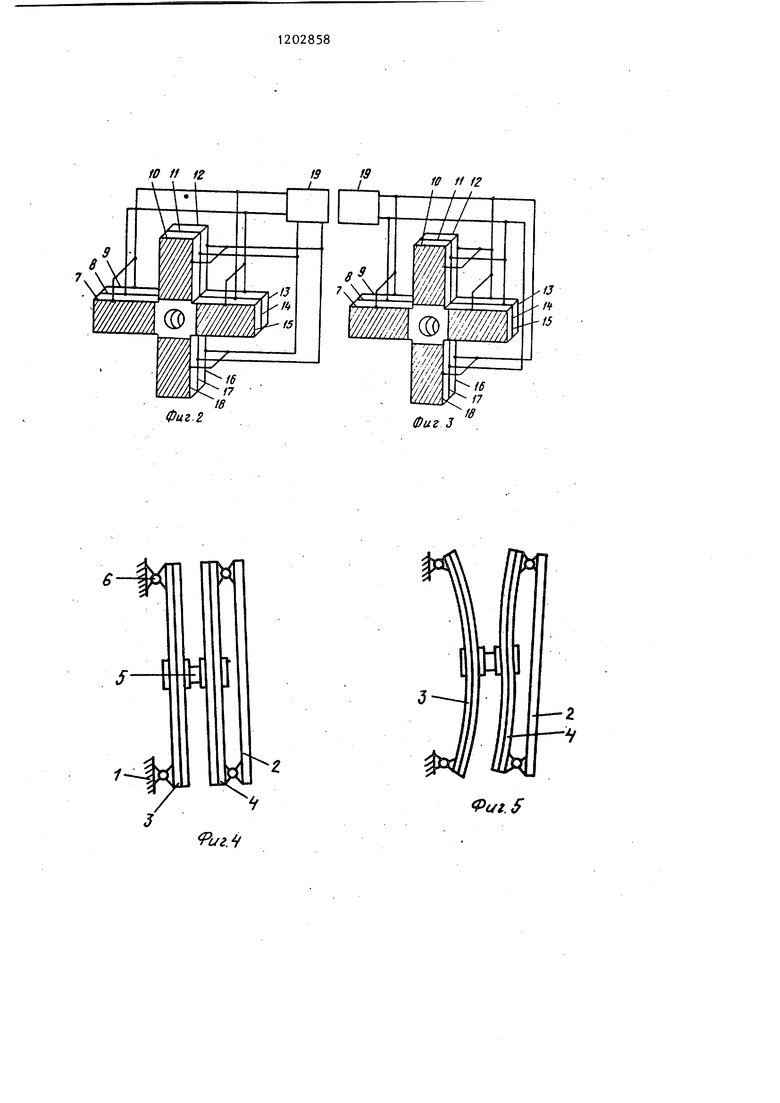
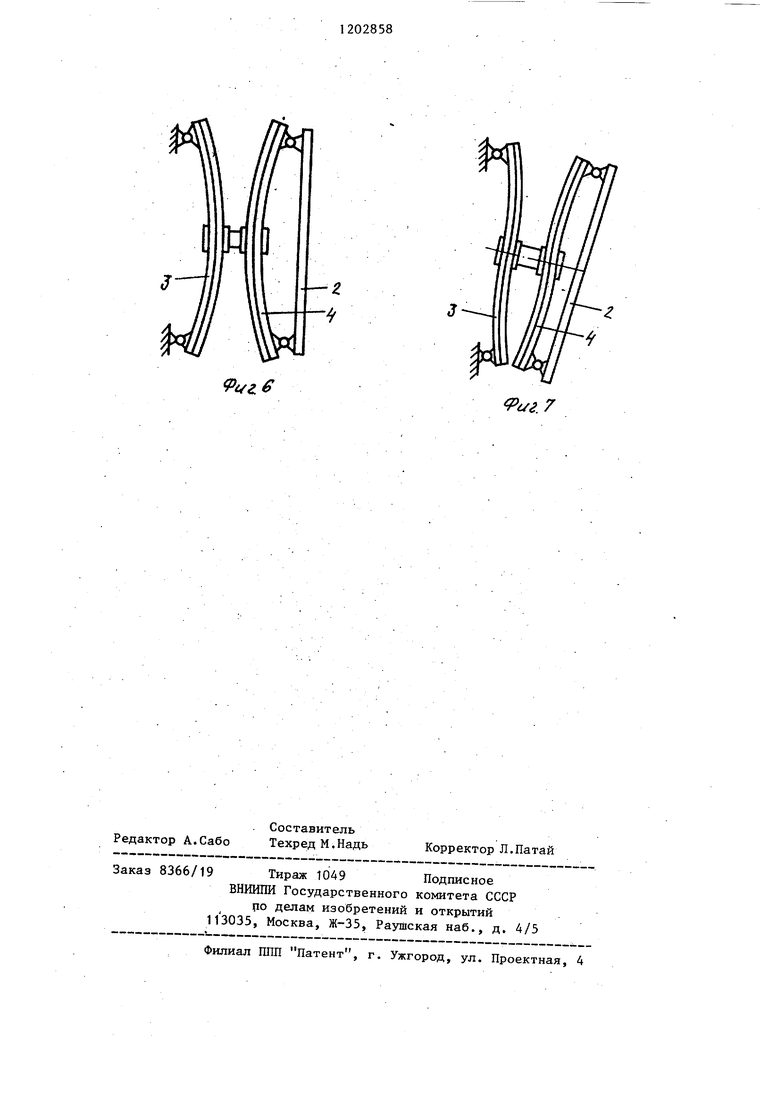
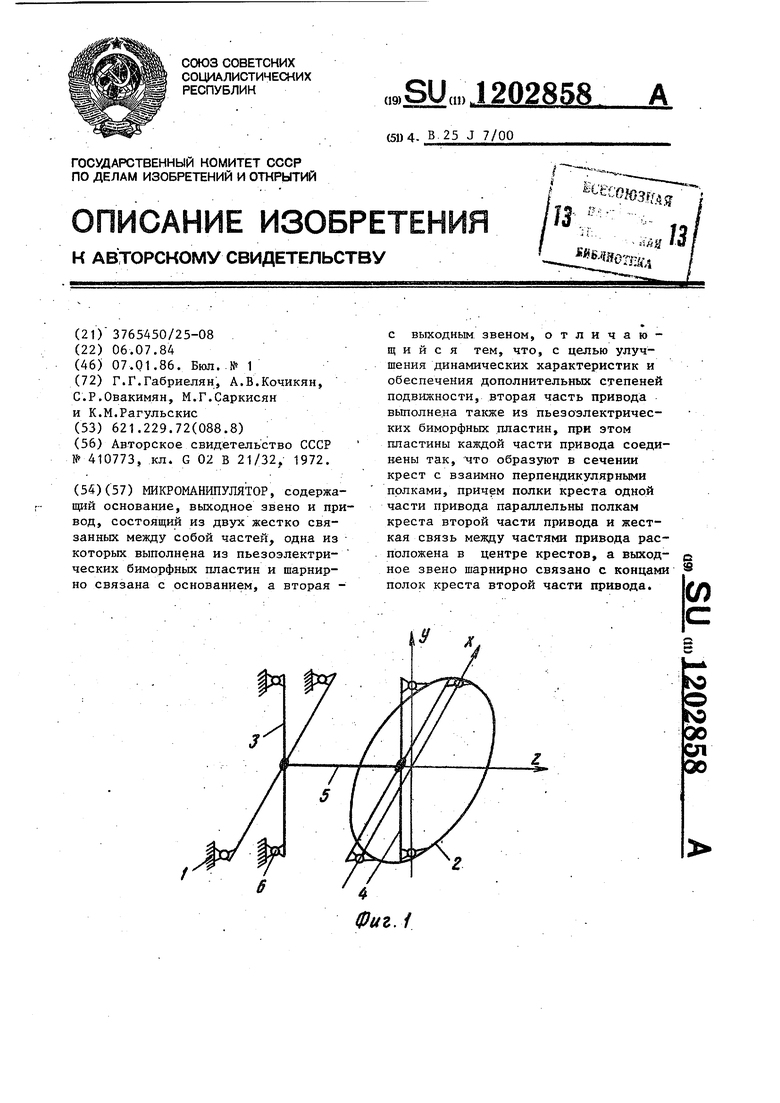
На фиг. 1 показана кинематическая схема микроманипулятора; на фиг. 2 - схема коммутации электродов лучей крестов частей привода для получения угловых перемещений; на фиг. 3 - схема коммутации электродов лучей крестов частей привода для получения линейных перемещений; на-фиг.4 - конструктивная схема микроманипулятора, на фиг. 5-7 - варианты возможных деформаций частей привода микроманипулятора.
Микроманипулятор (фиг. 1) содержит основание 1, выходное звено 2 для установки исполнительного элемента (не показан). Привод перемещения выходного звена состоит из двух частей 3 и 4. Каждая часть выполнена из пьезоэлектрических биморфных пластин, поляризованных по толщине и соединенных так, что образуют крест с взаимно перпендикулярными лучами. Лучи креста одной части привода параллельны лучами креста другой части. Части 3 и 4 жестко связаны между собой промежуточным звеном 5, закрепленным в центре крестов.
Лучи крестов частей 3.и 4 приво- ,да соединены соответственно с основанием 1 и выходным звеном 2 посредством упругих шарниров 6, выполненных, например, в виде карданного подвеса с упругими шарнирными элеметами, допускающими поворот частей
3 и 4 относительно их взаимно перг пендикулярных осей. Наружные и внутренние управляющие электроды 7-18 расположены на лучах крестов частей 3 и 4, электрически разъеди-- нены друг от друга и подключены к источнику 19 напряжения через блок управления (не показан), обеспечивающий требуемую коммутацию управ- ляющих электродов между собой и источником 19.
Микроманипулятор работает следующим образом.
i При подаче напряжения от источни- ка 19 через блок управления (фиг,2) на управляющие электроды 7-18 части диаметрально противоположные лучи изгибаются в противоположные стороны, при этом выходное звено 2 поворачивается относительно осей X и у. При подаче напряжения от источника 19 через блок управления (фиг. 3) на управляющие электроды 7--18 части 3 все лучи изгибаются в одном направлении, при этом выход- ное звено линейно перемещается вдоль оси Z. При подаче напряжения на управляющие электроды 7-18 частей 3 и 4 (фиг. 3) линейные перемещения /частей 3 и 4 вдоль оси z складываются, при этом линейные перемещения выходного звена 2 удваиваются (фиг. 5). При подаче напряжения на управляющие электроды 7-18 частей 3 и 4 (фиг. 2) угловые перемещения частей ЗиЛ складьюаются, в результате угловые перемещения выходного звена 2 удваиваются (фиг. 6).
В случаях отработки частями привода микроманипулятора линейных и угловых (фиг. 7), а также только линейных (фиг. 6) перемещений выходного звена промежуточное звено, связывающее центральные преобразователей, может быть установлено на дополнительных направляющих пос- тупательного перемещения, например упругих мембранах, связанных с основанием микроманипулятора..
to ff tZ
Фиг.2
18
Фиг 3
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ осуществления микроперемещений | 1978 |
|
SU705569A1 |
| ПРИВОД МИКРОМАНИПУЛЯТОРА | 1998 |
|
RU2149752C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ МИКРбМАНИПУЛЯТОР | 1969 |
|
SU252000A1 |
| РОТАЦИОННЫЙ ПРИВОД МИКРОМАНИПУЛЯТОРА | 2004 |
|
RU2266811C1 |
| ТЕРМОЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ МИКРОМАНИПУЛЯТОРА (ВАРИАНТЫ) | 2004 |
|
RU2259914C1 |
| ДВУХСТОРОННИЙ ПЬЕЗОЭЛЕКТРОМЕХАНИЧЕСКИЙ МИКРОПРИВОД | 2004 |
|
RU2259913C1 |
| УСИЛИВАЮЩИЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ АКТЮАТОР ПОВЫШЕННОЙ ТОЧНОСТИ ПОЗИЦИОНИРОВАНИЯ | 2016 |
|
RU2624773C1 |
| Способ перемещения подвижного звена и устройство для его осуществления | 1990 |
|
SU1815206A1 |
| УСТРОЙСТВО ОТКЛОНЕНИЯ ЛУЧА | 1992 |
|
RU2069383C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРИВОД МИКРОМАНИПУЛЯТОРА | 2004 |
|
RU2266808C1 |
Puf.S
Риг.
9иг
Риг. 7
Редактор А.Сабо
Составитель Техред М.Надь
Заказ 8366/19 Тираж t049 Подписное
ВНИИПИ Государственного комитета СССР
цо делам изобретений и открытий . И ЗОЗЗ, Москва, Ж-35, Раушская наб., д. 4/5
Филиал Ш1П Патент, г. Ужгород, ул. Проектная, 4
Корректор Л.Патай
| 1972 |
|
SU410773A1 | |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
