Изобретение относится к устройствам автоматизации сборки микроэлектромеханических систем и предназначено для использования в микроманипуляторах в качестве поворотного исполнительного механизма.
Известен привод микроманипулятора, представляющий собой пьезоэлектрический элемент в виде стержня. Стержень образован поляризованными по ширине пластинами. На торцевые поверхности стержня нанесены электроды [патент РФ №2149752, кл. B 25 J 7/00, H 01 L 41/08, 2000].
В традиционном понимании данное устройство не является поворотным исполнительным механизмом, хотя реализация на его основе вращательной кинематической пары пятого класса возможна, например, как работающее на изгиб подвижное соединение ведомого и ведущего звеньев микроманипулятора. Однако такая реализация будет иметь существенное ограничение - чрезвычайно малый диапазон углового перемещения ведомого звена.
Также известен привод микроманипулятора, выполненный в виде пьезонасоса, состоящего из пьезоэлемента, двух эластичных элементов конструкции, двух каналов пьезонасоса, снабженных двумя стаканами, расположенными в них двумя клапанами, цилиндра с поршнем и рабочей жидкости. Пьезоэлемент выполнен деформируемым и подвижным и регулируемым с помощью винта. Каждый из клапанов представляет собой пьезокристалл. При этом каналы соединены с полостью цилиндра. К поршню прикреплен схват. Эластичные элементы конструкции могут быть выполнены в виде деформируемых конусов, или деформируемых внутренних поверхностей конусов, или в виде накладок на деформируемом и подвижном элементе пьезонасоса. Деформируемый и подвижный пьезоэлемент конструкции может быть выполнен в виде пьезокристалла или в виде рычага, соединенного с пьезокристаллом [патент РФ №2175601, кл. B 25 J 7/00, 2001].
Данное устройство также из-за конструктивных особенностей не способно обеспечить угловое перемещение ведомого звена микроманипулятора.
Наиболее близким по технической сущности является ротационный привод системы микроманипулирования мобильного пьезоэлектрического микроробота [патент РФ №2164362, кл. H 01 L 41/09, H 02 N 2/00, B 25 J 7/00, 2001], содержащий шаровую основу в виде сферического шарнира, постоянный магнит в виде основания, микровибраторы в виде пьезоэлектрических преобразователей, образующих декартову систему координат.
Недостатком прототипа является сложность управления, вызванная тем, что желаемое движение является составным и генерируется с помощью чередующихся последовательностей простейших движений - вращений вокруг одного из пьезопреобразователей. Кроме того, ротационный привод имеет сложную конструкцию и неудовлетворительные массогабаритные показатели, что не позволяет на его основе реализовать систему микроманипулирования с двумя и более кинематическими парами.
Задачей, на решение которой направлено заявляемое изобретение, является упрощение эксплуатации и конструкции привода, улучшение массогабаритных показателей, что в итоге позволит на его основе реализовать многозвенный микроманипулятор, а это в свою очередь позволит расширить манипуляционные возможности и реализовать более сложные траектории движения рабочего органа микроманипулятора.
Решение поставленной задачи достигается тем, что в ротационном приводе микроманипулятора, содержащем основание, выполненное за одно целое с ведущем звеном микроманипулятора, ротационную головку, выполненную из фрикционного материала за одно целое с ведомым звеном микроманипулятора, микровибраторы в виде трех пьезоэлектрических преобразователей, которые одними концами закреплены в основании, а другие концы являются свободными, в отличие от прототипа основание и ротационная головка выполнены в виде цилиндрического шарнира, а пьезоэлектрические преобразователи расположены в одной плоскости и параллельно друг другу, причем на их свободных концах выполнены упругодеформируемые износостойкие элементы, которые фрикционно взаимодействуют с ротационной головкой при работе пьезоэлектрических преобразователей на сжатие-растяжение.
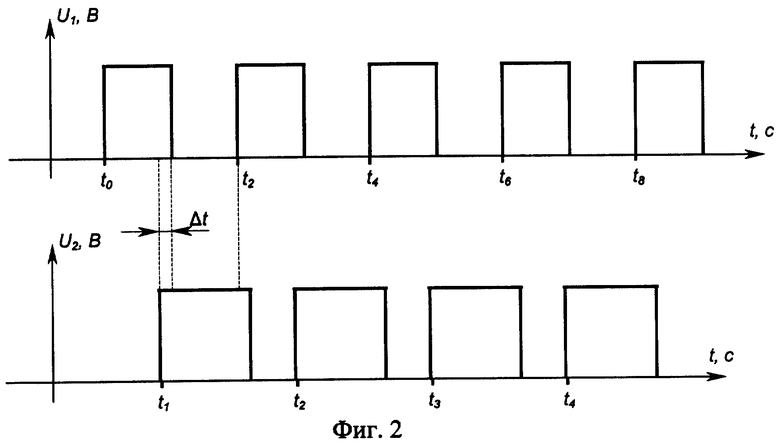
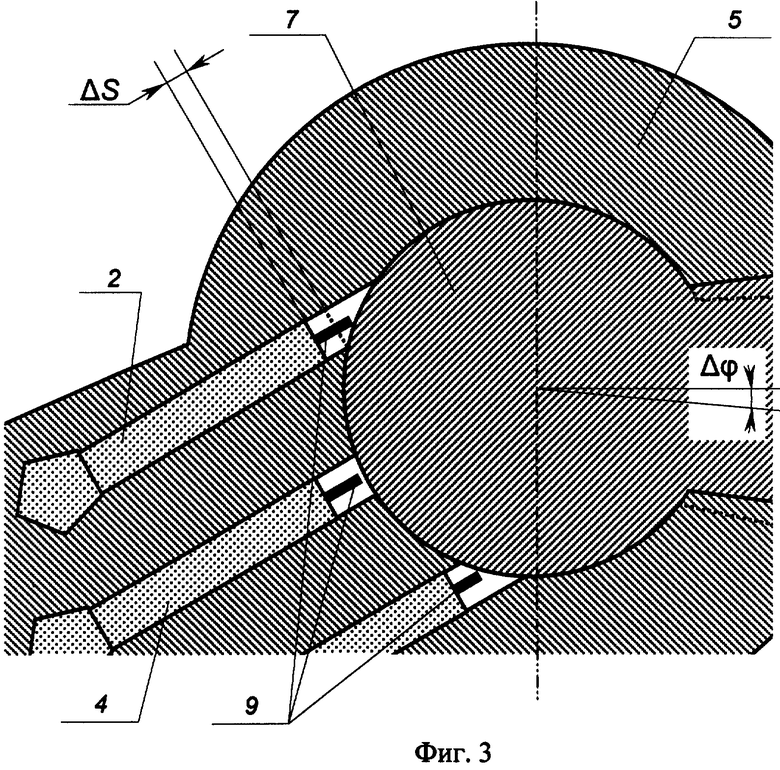
На фиг.1 представлена конструкция ротационного привода микроманипулятора; на фиг.2 - временные диаграммы управляющих напряжений для пьезоэлектрических преобразователей; на фиг.3 - первая фаза вращения ротационной головки по направлению движения часовой стрелки.
Ротационный привод 1 микроманипулятора (фиг.1) содержит микровибраторы в виде трех пьезоэлектрических преобразователей, первый из которых - преобразователь 2 поворота по направлению движения часовой стрелки, второй - преобразователь 3 поворота против направления движения часовой стрелки, а третий - фиксирующий преобразователь 4. Основание 5 привода выполнено за одно целое с ведущем 6 звеном микроманипулятора. Ротационная головка 7 выполнена из фрикционного материала за одно целое с ведомым 8 звеном микроманипулятора. Основание 5 и ротационная головка 7 выполнены в виде цилиндрического шарнира. Пьезоэлектрические преобразователи 2, 3 и 4 расположены в одной плоскости, параллельно друг другу и одним из двух концов закреплены в основании 5, а на другом конце каждого преобразователя 2, 3 и 4 выполнен упругодеформирумый износостойкий элемент 9, который фрикционно взаимодействует с ротационной головкой 7 при работе пьезоэлектрических преобразователей 2, 3 и 4 на сжатие-растяжение.
Ротационный привод микроманипулятора работает следующим образом.
В ротационном приводе для реализации поворота ведомого звена служат микровибраторы, выполненные в виде пьезоэлектрических преобразователей, которые работают на сжатие-растяжение и взаимодействуют с ротационной головкой ведомого звена таким образом, что оно может либо реверсивно вращаться, либо быть жестко зафиксированным в одном положении.
Рассмотрим поворот ведомого звена по направлению движения часовой стрелки.
В этом режиме задействованы преобразователь 2 поворота по направлению движения часовой стрелки и фиксирующий преобразователь 4, на которые подаются управляющие прямоугольные напряжения соответственно U1 и U2. Под действием электрического напряжения пьезоэлектрические преобразователи деформируются - изменяют свою длину, так при подаче напряжений они удлиняются (растягиваются), при снятии - укорачиваются (сжимаются).
В момент времени t0 на преобразователь 2 поворота по направлению движения часовой стрелки начинает подаваться напряжение U1 (фиг.2), которое вызывает его удлинение на величину ΔS (фиг.3). Упругодеформируемый износостойкий элемент 9, выполненный на свободном конце преобразователя 2, входит в фрикционное взаимодействие с ротационной головкой 7 и под действием механического усилия частично изгибается и одновременно с этим коротким толчком поворачивает ротационную головку 7 по направлению движения часовой стрелки на угол Δϕ, поскольку в этот момент цилиндрический шарнир обеспечивает свободное относительное вращение. В момент времени t1 на фиксирующий преобразователь 4 подается напряжение U2 и с задержкой Δt, т.е. в момент времени t1+Δt, снимается напряжение U1. Это инициирует растяжение фиксирующего преобразователя 4 и неподвижность ротационной головки 7 относительно основания 5, а также обратную деформацию преобразователя 2. В момент времени t2 на преобразователь 2 вновь подается напряжение U1 и с задержкой Δt снимается напряжение U2 с фиксирующего преобразователя 4. На этом, при результирующем угле поворота Δϕ первая фаза вращения ротационной головки по направлению движения часовой стрелки завершается. Подобным же образом реализуются вторая (с результирующим углом поворота 2·Δϕ), третья (3·Δϕ), четвертая (4·Δϕ) и т.д. фазы поворота.
Поворот против направления движения часовой стрелки осуществляется полностью аналогично повороту по направлению движения часовой стрелки за исключением того, что в этом режиме вместо преобразователя 2 в работе задействован преобразователь 3.
Отсутствие в приводе микроманипулятора постоянного магнита для удержания ротационной головки позволяет улучшить массогабаритные показатели и упростить конструкцию привода. Кроме того, поскольку желаемое движение ротационной головки не является сложносоставным, заявляемое изобретение также позволяет упростить эксплуатацию привода.
Таким образом, предложенное изобретение позволяет решить поставленные задачи и реализовать на его основе многозвенный микроманипулятор и тем самым расширить манипуляционные возможности путем получения более сложных траекторий движения рабочего органа.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРИВОД МИКРОМАНИПУЛЯТОРА | 2004 |
|
RU2266808C1 |
| НАНОСТРУКТУРНОЕ ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ МАНИПУЛИРОВАНИЯ МИКРООБЪЕКТАМИ, ИЗГОТОВЛЕННЫМИ ИЗ ЭЛЕКТРОПРОВОДНИКОВЫХ МАТЕРИАЛОВ | 2009 |
|
RU2423223C1 |
| ПРИВОД МИКРОМАНИПУЛЯТОРА | 2000 |
|
RU2175601C2 |
| ДВУХСТОРОННИЙ ПЬЕЗОЭЛЕКТРОМЕХАНИЧЕСКИЙ МИКРОПРИВОД | 2004 |
|
RU2259913C1 |
| АВТОНОМНОЕ ВАКУУМНОЕ ЗАХВАТНОЕ УСТРОЙСТВО МИКРОРОБОТА | 2004 |
|
RU2266810C1 |
| ВАКУУМНОЕ ЗАХВАТНОЕ УСТРОЙСТВО МИКРОРОБОТА | 2005 |
|
RU2281197C1 |
| МОБИЛЬНЫЙ ВАКУУМНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ МИКРОРОБОТ | 2002 |
|
RU2205475C1 |
| НАНОСТРУКТУРНОЕ ЗАХВАТНОЕ УСТРОЙСТВО МИКРОМАНИПУЛЯТОРА | 2006 |
|
RU2331505C1 |
| ТЕРМОЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ МИКРОМАНИПУЛЯТОРА (ВАРИАНТЫ) | 2004 |
|
RU2259914C1 |
| КАПИЛЛЯРНЫЙ МИКРОЗАХВАТ С ОБРАТНОЙ СВЯЗЬЮ | 2004 |
|
RU2261795C1 |
Изобретение относится к устройствам автоматизации сборки микроэлектромеханических систем и предназначено для использования в микроманипуляторах в качестве поворотного исполнительного механизма. Привод содержит основание, ротационную головку, микровибраторы в виде трех пьезоэлектрических преобразователей. Основание выполнено за одно целое с ведущим звеном микроманипулятора. Ротационная головка выполнена из фрикционного материала за одно целое с ведомым звеном микроманипулятора. Основание и ротационная головка выполнены в виде цилиндрического шарнира. Пьезоэлектрические преобразователи расположены в одной плоскости и параллельно друг другу, одними концами закреплены в основании, а другие концы являются свободными. Причем на свободных концах пьезоэлектрических преобразователей выполнены упругодеформируемые износостойкие элементы, которые фрикционно взаимодействуют с ротационной головкой при работе пьезоэлектрических преобразователей на сжатие-растяжение. Изобретение позволит расширить манипуляционные возможности и реализовать более сложные траектории движения рабочего органа микроманипулятора. 3 ил.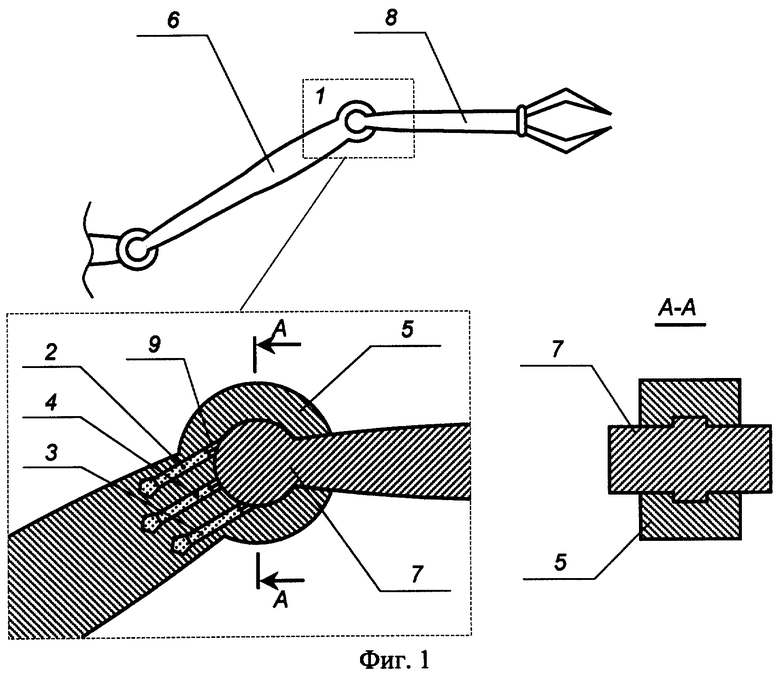
Ротационный привод микроманипулятора, содержащий основание, выполненное за одно целое с ведущим звеном микроманипулятора, ротационную головку, выполненную из фрикционного материала за одно целое с ведомым звеном микроманипулятора, микровибраторы в виде трех пьезоэлектрических преобразователей, которые одними концами закреплены в основании, а другие концы являются свободными, отличающийся тем, что основание и ротационная головка выполнены в виде цилиндрического шарнира, а пьезоэлектрические преобразователи расположены в одной плоскости и параллельно друг другу, причем на их свободных концах выполнены упругодеформируемые износостойкие элементы, которые фрикционно взаимодействуют с ротационной головкой при работе пьезоэлектрических преобразователей на сжатие-растяжение.
| МОБИЛЬНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ МИКРОРОБОТ | 1999 |
|
RU2164362C2 |
| Манипулятор | 1987 |
|
SU1493457A1 |
| Привод микроманипулятора | 1990 |
|
SU1756138A1 |
| DE 10236803 A, 20.11.2003 | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |

