Изобретение относится к области робототехники и микроэлектромеханическим системам (МЭМС), может быть использовано при создании микромеханизмов, в частности, мобильных микророботов, микроманипуляторов, микросхватов и т.д.
Известен привод микроманипулятора, представляющий собой пьезоэлектрический элемент в виде стержня. Стержень образован поляризованными по ширине пластинами. На торцевые поверхности стержня нанесены электроды [патент РФ №2149752, кл. B 25 J 7/00, H 01 L 41/08, 2000].
Недостатками данного устройства являются сложность генерации управляющих напряжений, сложность эксплуатации, вызванная относительно быстрым изменением пьезоэлектрических свойств привода со временем. Малое значение максимального отклонения конца привода ограничивает область применения данного устройства.
Известен также привод микроманипулятора, содержащий пьезоэлектрический элемент в виде стержня с крестообразным поперечным сечением с электродами на поверхностях, отличающийся тем, что пластины, образующие пьезоэлектрический элемент, поляризованы по ширине, а электроды нанесены на торцевые поверхности пьезоэлектрического элемента [заявка на изобретение №98113238, RU, кл. B 25 J 7/00, H 01 L 41/08, 2000].
Недостатками данного устройства также являются сложность управления и эксплуатации, относительно быстрое изменение пьезоэлектрических свойств привода со временем, большие значения управляющих напряжений.
Наиболее близким по технической сущности к заявляемому изобретению является пьезоэлектрический преобразователь подвижной платформы микроробота, содержащий пьезокерамический трубчатый элемент с напыленными внутренним и четырьмя внешними симметрично расположенными электродами. Один конец пьезокерамического трубчатого элемента присоединен к втулке с проточенными пазами, в которые уложены провода. К другому свободному концу пьезокерамического трубчатого элемента приклеен рубиновый шарик [патент РФ №2164362, кл. H 01 L 41/09, H 02 N 2/00, B 25 J 7/00, 2001].
Преобразователь прототипа по принципу действия является пьезоэлектрическим. Поэтому недостатком данного устройства является сложность генерации управляющих напряжений при реализации относительно простых движений, например, изгиб-выпрямление пьезоэлектрического преобразователя. Кроме того, максимальная величина управляющих напряжений у прототипа может достигать 150 В и более, что с учетом малых размеров пьезоэлектрического преобразователя может стать причиной возникновения пробоя воздуха и короткого замыкания. Основным недостатком прототипа является малое значение максимального отклонения конца преобразователя (±3 мкм), что существенно ограничивает область применения данного устройства.
Задачей, на решение которой направлено заявляемое изобретение, является улучшение эксплуатационных характеристик, связанное с увеличением диапазона отклонений конца преобразователя, упрощением формы управляющих сигналов и снижением максимальных величин действующих напряжений, за счет использования материала с эффектом памяти формы и термоэлектрических модулей на основе эффекта Пельтье.
Решение поставленной задачи достигается тем, что в термоэлектромеханическом преобразователе для микроманипулятора на основе деформируемого стержня, в отличие от прототипа, содержатся размещенные внутри стержня спиральный электрический нагреватель и пружина изгиба, на концах которой выполнены крепежные приспособления для связывания звеньев микроманипулятора, а также нижний и верхний ряды термоэлектрических модулей на основе эффекта Пельтье, закрепленных на противоположенных поверхностях деформируемого стержня с возможностью вращения, причем деформируемый стержень выполнен из материала с эффектом памяти формы.
Решение поставленной задачи достигается также тем, что в термоэлектромеханическом преобразователе для микроманипулятора на основе деформируемого стержня, в отличие от прототипа, содержится размещенная внутри стержня пружина изгиба, на концах которой выполнены крепежные приспособления для связывания звеньев микроманипулятора, а также нижний и верхний ряды термоэлектрических модулей на основе эффекта Пельтье, закрепленных на противоположенных поверхностях деформируемого стержня с возможностью вращения, причем деформируемый стержень выполнен из электропроводникового материала с эффектом памяти формы.
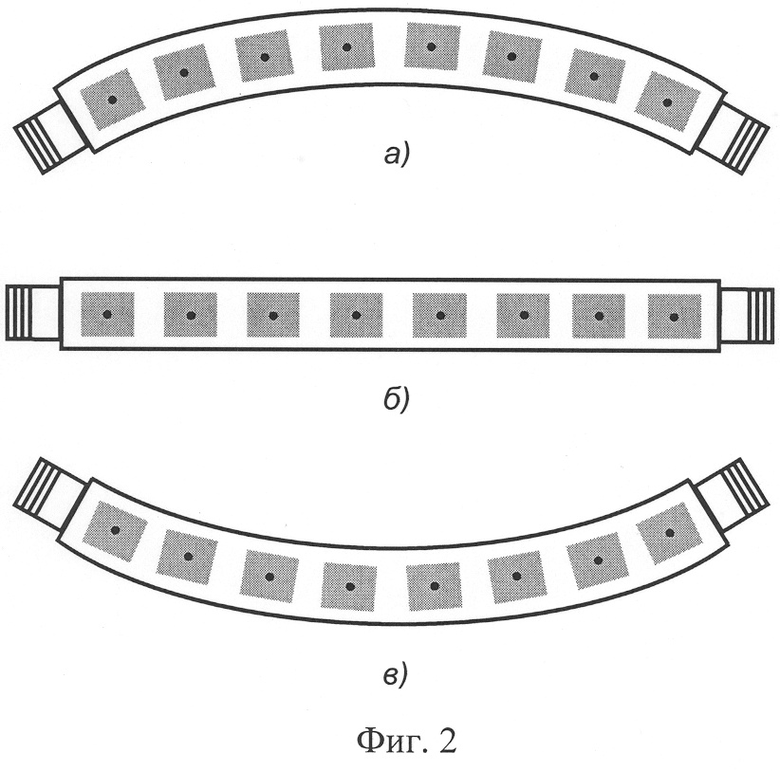
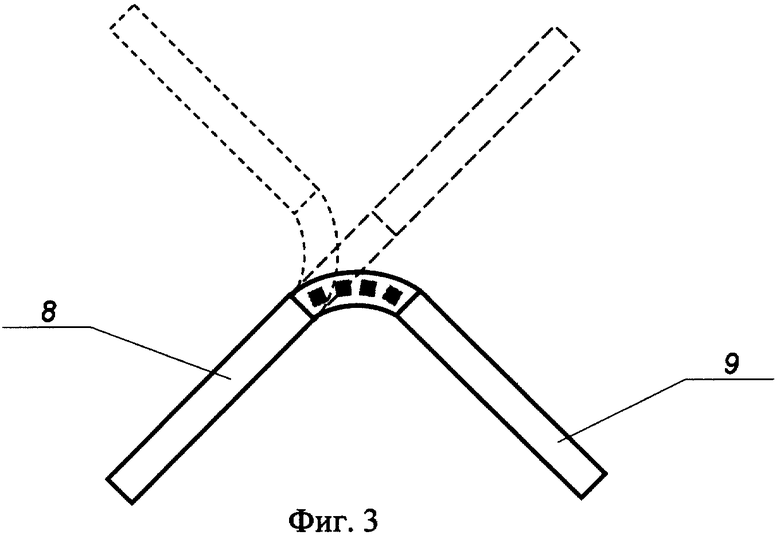
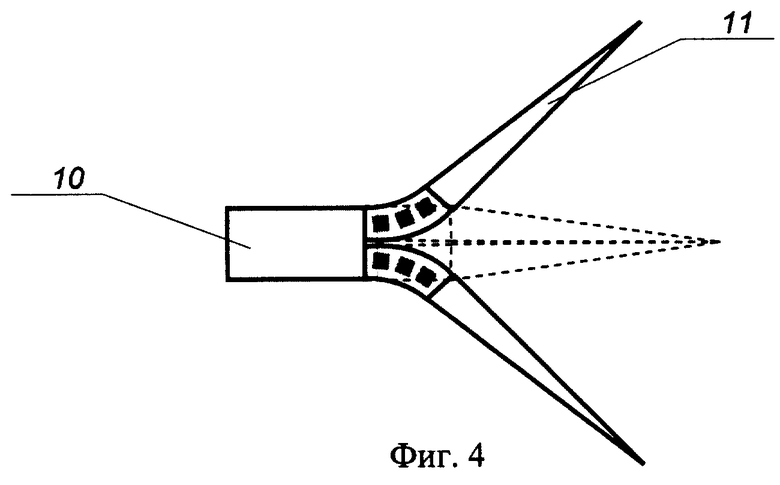
На фиг.1 представлена конструкция термоэлектромеханического преобразователя для микроманипулятора по варианту 1; на фиг.2 - термоэлектромеханический преобразователь в холодном (конфигурация верхняя дуга) (а), нагретом (нижняя дуга) (в) и равновесном состоянии (распрямленная дуга) (б); на фиг.3 - сочленение микроманипулятора на основе термоэлектромеханического преобразователя; на фиг.4 - механизм захвата микроманипулятора на основе термоэлектромеханического преобразователя. Конструкция термоэлектромеханического преобразователя для микроманипулятора по варианту 2 аналогична варианту 1 за исключением спирального электрического нагревателя, кроме того деформируемый стержень выполнен из электропроводникового материала с эффектом памяти формы.
Термоэлектромеханический преобразователь для микроманипулятора (фиг.1) содержит деформируемый стержень 1, спиральный электрический нагреватель 2, нижний 3 и верхний 4 ряды термоэлектрических модулей на основе эффекта Пельтье, заклепочные крепления 5, пружину изгиба 6, крепежные приспособления 7, с помощью которых связываются звенья 8 и 9 или 10 и 11 микроманипулятора (фиг.3 и 4).
Термоэлектромеханический преобразователь для микроманипулятора работает следующим образом.
Перед началом работы, до подачи управляющих напряжений, термоэлектромеханический преобразователь для микроманипулятора находится в конфигурации верхней дуги (фиг.2а). После подачи слабого электрического тока в спиральный электрический нагреватель 2 деформируемый стержень 1, изготовленный из материала с эффектом памяти формы, начинает нагреваться и одновременно восстанавливать свою первоначальную форму, переходя в аустенитное состояние, тем самым изгибая и изменяя непрерывно конфигурацию термоэлектромеханического преобразователя на распрямленную дугу (фиг.2б) и далее - нижнюю дугу (фиг.2в). Возможно также пропускание электрического тока непосредственно через деформируемый стержень 1, если последний выполнен из электропроводникового материала с эффектом памяти формы. При этом выделится тепловая энергия, которая также приведет к разогреву и изгибу деформируемого стержня 1 (вариант 2). Изгиб термоэлектромеханического преобразователя сопровождается выполнением механической работы, которая передается через крепежные приспособления 7, что позволяет реализовать вращательный привод двухстороннего действия для звеньев 8 и 9 микроманипулятора с поворотом против направления часовой стрелки или захват объекта нижним пальцем микросхвата 10. Таким образом, нагреванием деформируемого стержня 1 реализуется первая фаза изгиба термоэлектромеханического преобразователя.
Вторая фаза изгиба (изгиб в обратном направлении) реализуется охлаждением деформируемого стержня 1 нижним 3 и верхним 4 рядами термоэлектрических модулей на основе эффекта Пельтье, тем самым материал с эффектом памяти формы переходит в мартенситное состояние. При подаче слабого электрического напряжения каждый термоэлектрический модуль на основе эффекта Пельтье в местах контакта с деформируемым стержнем 1 поглощает тепло. Для более интенсивного охлаждения используется два ряда термоэлектрических модулей на основе эффекта Пельтье - нижний 3 и верхний 4, которые существенно ускоряют процесс обратного мартенситного превращения. В мартенситном состоянии деформируемый стержень 1 легко пластически деформируется пружиной изгиба 6. Под действием силы упругости пружины изгиба 6 термоэлектромеханический преобразователь сгибается в обратном направлении и переходит из конфигурации нижней дуги в верхнюю дугу. Заклепочное крепление 5, допускающее относительное вращение деталей, не позволяет термоэлектрическим модулям на основе эффекта Пельтье деформироваться как в процессе обратного, так и прямого мартенситного превращения. Обратный изгиб термоэлектромеханического преобразователя сопровождается выполнением механической работы, которая передается через крепежные приспособления 7, что позволяет реализовать вращательный привод двухстороннего действия для звеньев 8 и 9 микроманипулятора с поворотом по направлению часовой стрелки или захват объекта верхним пальцем 11 микросхвата 10. Таким образом, охлаждением деформируемого стержня 1 с помощью термоэлектрических модулей на основе эффекта Пельтье реализуется вторая фаза изгиба термоэлектромеханического преобразователя.
На этом первый термоэлектромеханический цикл работы завершается. Второй, третий, четвертый и т.д. циклы реализуются аналогично.
Итак, заявляемое изобретение позволяет провести улучшение эксплуатационных характеристик, связанное с увеличением диапазона отклонений конца преобразователя, упрощением формы управляющих сигналов и снижением максимальных величин действующих напряжений, за счет использования материала с эффектом памяти формы и термоэлектрических модулей на основе эффекта Пельтье.
| название | год | авторы | номер документа |
|---|---|---|---|
| БИМЕТАЛЛИЧЕСКИЙ МИКРОСХВАТ | 2009 |
|
RU2417878C1 |
| УСТРОЙСТВО ДЛЯ МАНИПУЛИРОВАНИЯ МИКРО- И НАНООБЪЕКТАМИ | 2018 |
|
RU2713527C2 |
| УСТРОЙСТВО ДЛЯ МАНИПУЛИРОВАНИЯ МИКРО- И НАНООБЪЕКТАМИ С ФУНКЦИЕЙ ХРАНЕНИЯ | 2018 |
|
RU2678699C1 |
| КАПИЛЛЯРНЫЙ МИКРОЗАХВАТ С ОБРАТНОЙ СВЯЗЬЮ | 2004 |
|
RU2261795C1 |
| МАГНИТОСТРИКЦИОННЫЙ МИКРОСХВАТ | 2009 |
|
RU2417877C1 |
| НАНОСТРУКТУРНОЕ ЗАХВАТНОЕ УСТРОЙСТВО МИКРОМАНИПУЛЯТОРА | 2006 |
|
RU2331505C1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ МИКРОСХВАТ | 2009 |
|
RU2417876C1 |
| МИКРОСИСТЕМНЫЙ ЗАХВАТ | 2015 |
|
RU2598416C1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ МИКРОСХВАТ | 2004 |
|
RU2266190C1 |
| НАНОСТРУКТУРНОЕ ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ МАНИПУЛИРОВАНИЯ МИКРООБЪЕКТАМИ, ИЗГОТОВЛЕННЫМИ ИЗ ЭЛЕКТРОПРОВОДНИКОВЫХ МАТЕРИАЛОВ | 2009 |
|
RU2423223C1 |
Изобретение относится к микроробототехнике. Преобразователь на основе деформируемого стержня содержит размещенные внутри стержня спиральный электрический нагреватель и пружину изгиба, на концах которой выполнены крепежные приспособления для связывания звеньев микроманипулятора, а также нижний и верхний ряды термоэлектрических модулей на основе эффекта Пельтье, закрепленных на противоположных поверхностях деформируемого стержня с возможностью вращения. Деформируемый стержень выполнен из материала с эффектом памяти формы. При исключении спирального электрического нагревателя деформируемый стрежень выполнен из электропроводникового материала с эффектом памяти формы. Изобретение позволит увеличить диапазон отклонений конца преобразователя, упростить форму управляющих сигналов и снизить максимальные величины действующих напряжений. 2 н.п. ф-лы, 4 ил.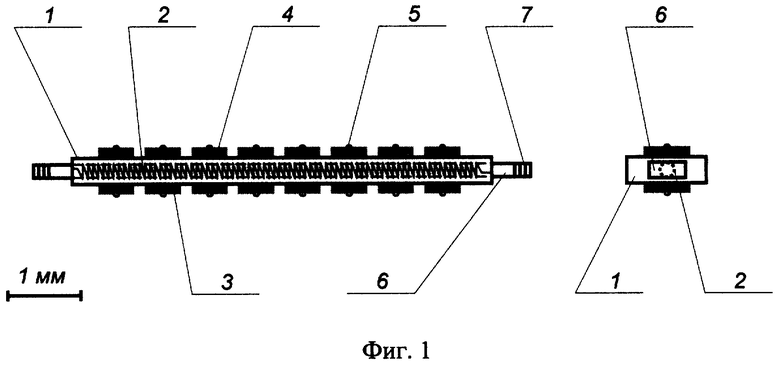
| Преобразователь энергии | 1989 |
|
SU1671958A1 |
| Электродвигатель возвратно-поступательного движения Булата-Гуцала | 1985 |
|
SU1394348A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |

