Изобретение относится к микроманипуляционной технике и предназначено для привода различных устройств микроэлектромеханики в прецизионном приборостроении, в медико-биологических исследованиях и в системах нанотехнологии.
Известен привод микроманипулятора, содержащий пьезоэлектрический элемент с крестообразным поперечным сечением, образованный поляризованными пластинами с нанесенными на их поверхности электродами (SU 1202858 A, 07.01.86, B 25 J 7/00) . Пластины пьезоэлектрического элемента поляризованы по толщине.
Недостаток указанного известного привода состоит в его ограниченных функциональных возможностях. Технической задачей, на решение которой направлено изобретение, является расширение функциональных возможностей привода микроманипулятора за счет обеспечения реверсивного перемещения рабочего органа.
Для решения поставленной задачи в приводе микроманипулятора, содержащем пьезоэлектрический элемент с крестообразным поперечным сечением, образованный поляризованными пластинами с нанесенными на их поверхности электродами, пьезоэлектрический элемент выполнен в виде стержня, пластины которого поляризованы по ширине, а электрода нанесены на торцевые поверхности стержня. Поляризация пластин пьезоэлемента по ширине и нанесение электродов на торцевые поверхности позволяет осуществить сдвиговую деформацию пьезоэлектрического элемента при подаче управляющего напряжения на торцевые электроды (см. книгу Аронова Б.С. Электромеханические преобразователи из пьезоэлектрической керамики, Л., 1990, с. 105, 106). Изменение полярности управляющего напряжения приводит к изменению знака сдвиговой деформации, чем достигается основной технический эффект изобретения - реверсивное перемещение рабочего органа микроманипулятора. Как известно, пьезоэлектрический модуль сдвиговой деформации d15 значительно превышает продольный d33 и поперечный d31 пьезоэлектрические модули (см. упомянутую книгу Аронова Б.С., стр. 264-266), что обеспечивает повышение чувствительности привода микроманипулятора - дополнительный технический эффект изобретения. Таким образом, выбранное конструктивное и технологическое решение заявляемого привода микроманипулятора обеспечивает расширение функциональных возможностей устройства.
Сущность изобретения поясняется нижеследующим описанием и чертежами, где на фиг. 1 изображен общий вид и схема внешних соединений привода микроманипулятора; на фиг. 2 - схема поляризации пьезоэлектрического элемента привода микроманипулятора; на фиг. 3 - схемы деформации пьезоэлектрического элемента привода микроманипулятора.
Привод микроманипулятора содержит пьезоэлектрический элемент 1, одним концом закрепленный в корпусе 2, а другим концом соединенный с рабочим органом 3. Пьезоэлектрический элемент 1 выполнен в виде монолитного стержня с крестообразным поперечным сечением из пьезоэлектрической керамики. Пьезоэлектрическая керамика поляризована в направлении ширины пластины, образующих пьезоэлектрический элемент. Операция поляризации поясняется схемой фиг. 2. После механической обработки стержня из пьезоэлектрической керамики на его центральную часть и периферийные части каждой пластины нанесены вспомогательные электроды 4, 5.1, 5.2, 5.3, 5.4. Электрод 4 и параллельно соединенные электроды 5.1, 5.2, 5.3, 5.4 подключены к источнику поляризующего напряжения 6. На фиг. 2 стрелками обозначено направление остаточной поляризации P.
После поляризации пьезоэлектрической керамики вспомогательные электроды 4, 5.1, 5.2, 5.3, 5.4 удалены химическим травлением и на торцевые поверхности пьезоэлектрического элемента 1 нанесены рабочие электроды 7, 8.1, 8.2, 8.3, 8.4. Электрод 7 и каждый из электродов 8.1, 8.2, 8.3, 8.4 подключены к выходным усилителям системы управления. На фиг. 1 условно показаны два из четырех усилителей - усилители 9.1, 9.3, и стрелкой обозначено направление напряженности электрического поля управляющего сигнала E.
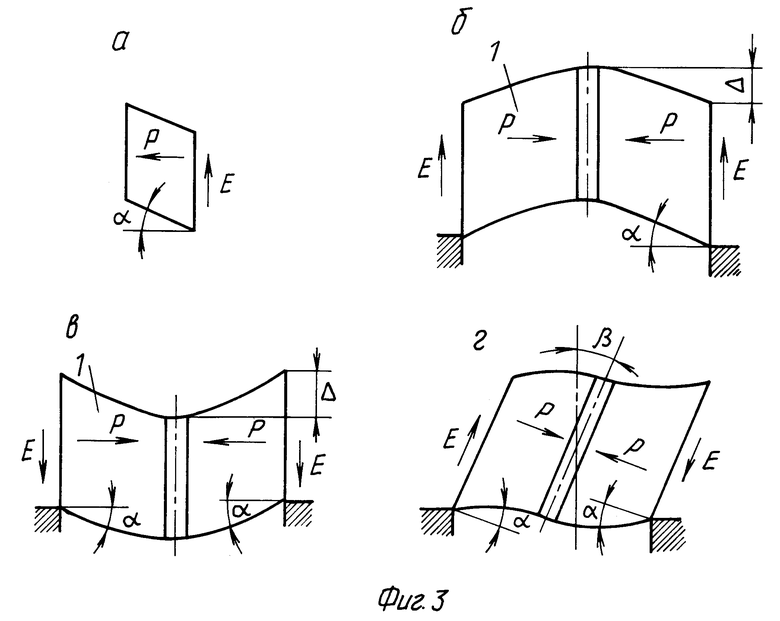
Привод микроманипулятора работает следующим образом. При подаче управляющего сигнала с выходного усилителя 9.1 на электроды 7, 8.1 пьезоэлектрического элемента 1 в пьезоэлектрической керамике происходит деформация сдвига, т. к. направления поляризации P и напряженности управляющего поля E взаимно перпендикулярны. Деформация сдвига на угол α в элементе объема пьезоэлектрической керамике показана на фиг. 3а.
При одновременной подаче управляющего сигнала на все рабочие электроды происходит деформация пьезоэлектрического элемента 1, изображенная на фиг. 3б и приводящая к продольному перемещению рабочего органа 3 на расстояние Δ. При изменении полярности управляющего сигнала происходит деформация пьезоэлектрического элемента 1, изображенная на фиг. 3в и приводящая к линейному перемещению рабочего органа 3 в противоположном направлении. При подаче на электроды противолежащих пластин, например - на электроды 8.1 и 8.3, управляющих сигналов разных полярностей происходит деформация пьезоэлектрического элемента 1, приводящая к угловому перемещению рабочего органа 3 (угол β на фиг. 3г). При этом угловое перемещение так же реверсивно, как и линейное.
Поляризация по ширине пластин, примененная в пьезоэлектрическом элементе с крестообразным поперечным сечением, и нанесение управляющих электродов на торцевые поверхности пьезоэлектрического элемента позволяют осуществить реверсивное перемещение рабочего органа микроманипулятора, как угловое, так и продольное, что расширяет функциональные возможности микроманипулятора.
Технические преимущества привода микроманипулятора позволяют применить его в медико-биологических исследованиях и в системах нанотехнологии, например - в устройствах массопереноса на атомном уровне.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВИБРОДВИГАТЕЛЬ | 1995 |
|
RU2113050C1 |
| ТВЕРДОТЕЛЬНОЕ ИСПОЛНИТЕЛЬНОЕ УСТРОЙСТВО | 2004 |
|
RU2260828C1 |
| ФАЗОВЫЙ МОДУЛЯТОР ВОЛНОВОГО ФРОНТА | 2001 |
|
RU2202816C2 |
| ИСПОЛНИТЕЛЬНОЕ УСТРОЙСТВО РАСТРОВОГО МИКРОСКОПА | 1996 |
|
RU2114493C1 |
| ТВЕРДОТЕЛЬНЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2003 |
|
RU2251176C2 |
| ТЕРМОЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ МИКРОМАНИПУЛЯТОРА (ВАРИАНТЫ) | 2004 |
|
RU2259914C1 |
| МОНОЛИТНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ИСПОЛНИТЕЛЬНЫЙ ЭЛЕМЕНТ | 2004 |
|
RU2279156C1 |
| Облучающая система следящей зеркальной антенны | 2023 |
|
RU2802763C1 |
| ФАЗОВЫЙ МОДУЛЯТОР ВОЛНОВОГО ФРОНТА | 1994 |
|
RU2080638C1 |
| РОТАЦИОННЫЙ ПРИВОД МИКРОМАНИПУЛЯТОРА | 2004 |
|
RU2266811C1 |

Изобретение может быть использовано для привода различных устройств микроэлектромеханики в прецизионном приборостроении, при медико-биологических исследованиях и в системах нанотехнологии. Привод микроманипулятора представляет собой пьезоэлектрический элемент в виде стержня. Стержень образован поляризованными по ширине пластинами. На торцевые поверхности стержня нанесены электроды. В результате обеспечивается расширение технологических возможностей привода. 3 ил.
Привод микроманипулятора, содержащий пьезоэлектрический элемент с крестообразным поперечным сечением, образованный поляризованными пластинами с нанесенными на их поверхности электродами, отличающийся тем, что пьезоэлектрический элемент выполнен в виде стержня, пластины которого поляризованы по ширине, а электроды нанесены на торцевые поверхности стержня.
| Микроманипулятор | 1984 |
|
SU1202858A1 |
| Микроманипулятор | 1980 |
|
SU960004A1 |
| Лесозаготовительная машина | 1980 |
|
SU933499A1 |
| Устройство для изучения биопотенциалов биологических объектов | 1979 |
|
SU930795A1 |
| Привод | 1975 |
|
SU541663A1 |
| DE 3610540 А1, 01.10.1987 | |||
| DE 3822504 А1, 04.01.1990 | |||
| DE 4031138 А1, 11.04.1991 | |||
| КАМЕРА ЖРД С РЕГУЛИРУЕМЫМ СОПЛОМ | 2016 |
|
RU2640903C1 |
