Изобретение относится к мйкроманййуляторам, предназначенным для применения в тех областях, где требуются незначительные, но точные перемещения инструмента в пространстве, например при микробиологических исследованиях в микрохирургии и т. д.
Известны пьезоэлектрические микроманипуляторы, содержащие соединенные с держателем инструментов биморфные пьезоэлектрические элементы, подключаемые к источнику подачи электрического напряжения. Эти микроманипуляторы для получения относительно больших перемещений инструмента приходится делать весьма большими, что зачастую затрудняет их использование при работе с малыми объектами или под микроскопом, а тем более при одновременной работе несколькими микроманипуляторами, как например, при микробиологических исследованиях. Уменьшение габаритов подобных микроманипуляторов приводит к уменьшению перемещений инструмента, что сужает область их применения. При этом, поскольку для подвески пьезобиморфных элементов в качестве шарниров используются нерегулируемые тяги из стальной проволоки, на основное движение инструмента накладываются вторичные явления, присущие пьезоматериалам (эффект насыщения, гистерезис и т. п.), тем самым увеличивая неСтабильность и йелинейность перемещения инструмента и снижая точность его установки.
Предлагаемый пьезоэлектрический микроманипулятор отличается от известных тем,
что его пьезоэлементы, изгибающиеся при изменении электрического напряжения, расположены в виде параллелограмма и соединены в одной из вершин параллелограмма неподвижно, а в остальных с помощью регулируемых шарниров, состоящих, например, из основания и укрепленных в нем подпружиненной опоры и регулировочного винта. Это отличие увеличивает величину неремещения выходного звена и повышает точность его установки.
Кроме того, с целью исключения поломки пьезоэлектрических элементов при смене инструментов предлагаемый микроманнпулятор снабжен фиксатором держателя инструментов
в нерабочем положении, выполненным, например, в виде зажимных губок, управляемых винтом с правой и левой резьбой.
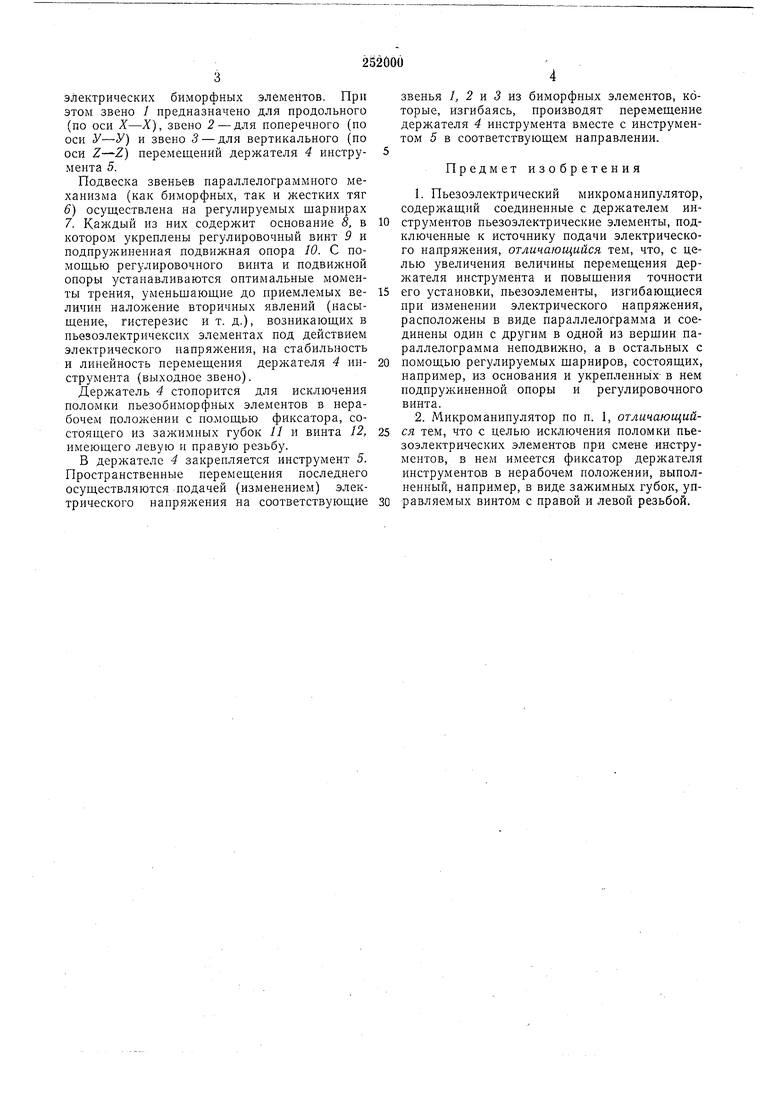
На фиг. 1 схематически изображен предлагаемый пьезоэлектрический микроманипулятор; на фиг. 2 - регулируемый шарнир; на фиг. 3 - фиксатор держателя инструментов в нерабочем положении.
электрических биморфных элементов. При этом звено 1 предназначено для продольного (по оси X-X), звено 2 - для поперечного (по оси У-У) и звено 3 - для вертикального (по оси Z-Z) перемещений держателя 4 инструмента 5.
Подвеска звеньев параллелограммного механизма (как биморфных, так и жестких тяг 6) осуществлена на регулируемых щарнирах 7. Каждый из них содержит основание 8, в котором укреплены регулировочный винт 9 и подпружиненная подвижная опора 10. С помощью регулировочного винта и подвижной опоры устанавливаются оптимальные моменты трения, уменьщающие до приемлемых величин налол ение вторичных явлений (насыщение, гистерезис и т. д.), возникающих в пьезоэлектричексих элементах под действием электрического напряжения, на стабильность и линейность перемещения держателя 4 инструмента (выходное звено).
Держатель 4 стопорится для исключения поломки пьезобиморфных элементов в нерабочем положении с помощью фиксатора, состоящего из зажимных губок //и винта 12, имеющего левую и правую резьбу.
В держателе 4 закрепляется инструмент 5. Пространственные перемещения последнего осуществляются подачей (изменением) электрического напряжения на соответствующие
звенья Л 2 и 5 из биморфных элементов, которые, изгибаясь, производят перемещение держателя 4 инструмента вместе с инструментом 5 в соответствующем направлении.
Предмет изобретения
1.Пьезоэлектрический микроманипулятор, содержащий соединенные с держателем инструментов пьезоэлектрические элементы, подключенные к источнику подачи электрического напряжения, отличающийся тем, что, с целью увеличения величины перемещения держателя инструмента и повыщения точности
его установки, пьезоэлементы, изгибающиеся при изменении электрического напряжения, расположены в виде параллелограмма и соединены один с другим в одной из верщин параллелограмма неподвижно, а в остальных с
помощью регулируемых щарниров, состоящих, например, из основания и укрепленнь1х- в нем подпружиненной опоры и регулировочного винта.
2.Микроманинулятор по п. 1, отличающийся тем, что с целью исключения поломки пьезоэлектрических элементов при смене инсгрументов, в нем имеется фиксатор держателя инструментов в нерабочем положении, выполненный, например, в виде зажимных губок, управляемых винтом с правой и левой резьбой.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для изготовления биморфного пьезоэлемента | 1980 |
|
SU898589A1 |
| Пьезоэлектрический сейсмоприемник | 1975 |
|
SU572733A1 |
| РОТАЦИОННЫЙ ПРИВОД МИКРОМАНИПУЛЯТОРА | 2004 |
|
RU2266811C1 |
| МИКРОМАНИПУЛЯТОР ДЛЯ ПОЗИЦИОНИРОВАНИЯ ЗОНДА | 1992 |
|
RU2056666C1 |
| Микроманипулятор для биоткани | 1983 |
|
SU1093321A1 |
| Устройство для изучения биопотенциалов биологических объектов | 1979 |
|
SU930795A1 |
| УСТРОЙСТВО для СОВМЕЩЕНИЯ РИСУНКА Фо|с1Щ^ЛрНА '• I С РИСУНКОМ подложки ПРИ КОНТАКТНОЙ ФОТОПЕЧ/СТЙ-^ | 1967 |
|
SU190210A1 |
| УСТРОЙСТВО для ПОДАЧИ ШТУЧНЫХ ЗАГОТОВ( в ЗОНУ ОБРАБОТКИ | 1972 |
|
SU327958A1 |
| Привод микроманипулятора | 1990 |
|
SU1756138A1 |
| МИКРОСИСТЕМНЫЙ ЗАХВАТ | 2015 |
|
RU2598416C1 |

tx Я Л-JTi: : ;
УV
Ю В 8
Риг.З
