Изобретение относится к робототехнике и может быть использовано при создании устройств управления транспортными средствами.
Цель изобретения - повышение точности устройства и расширение его функциональных возможностей за счет обеспечения опознавания объектов.
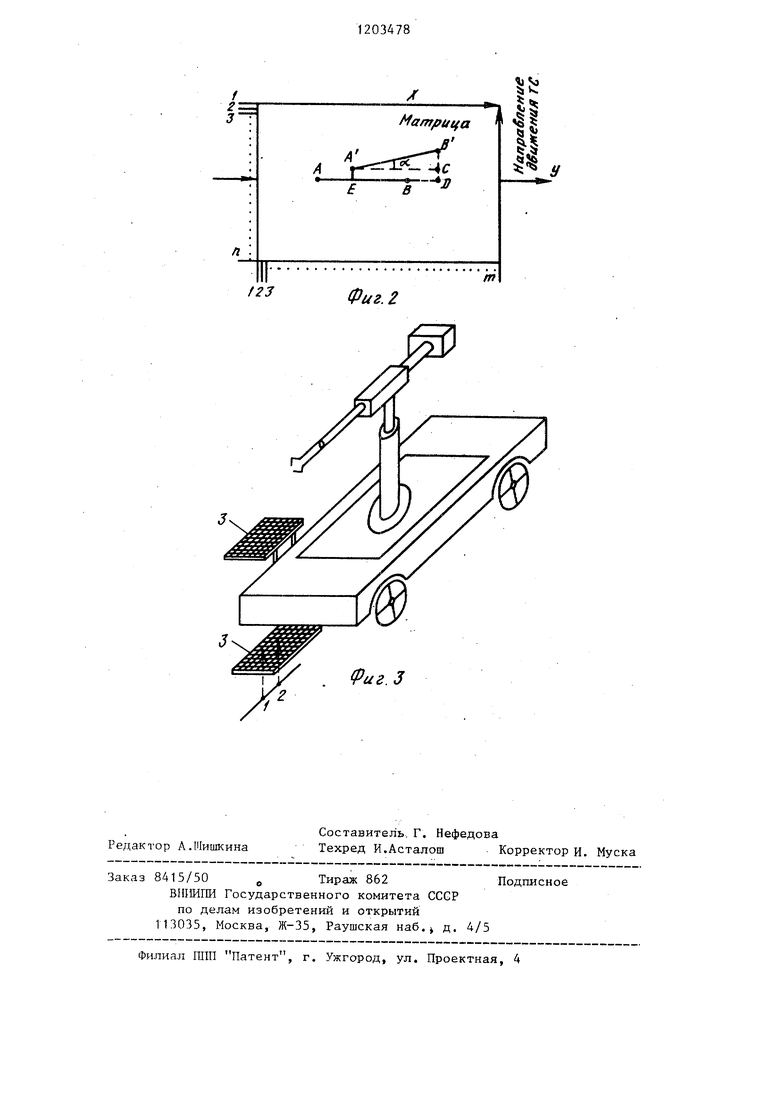
На фиг. 1 показана функциональная схема устройства; на фиг. 2 - схема, поясняющая принцип действия устройства , на фиг. 3 - расположение источников и матрицы.
Устройство содержит первый 1 и второй 2 источники излучения, чувствительную матрицу 3, первый 4, второй 5, третий 6 и четвертый 7 преобразователи, первый сумматор 8, первый блок 9 деления, вычислитель 10 угла, вычислитель 11 косинуса угла, второй блок 12 деления, второй сумматор 13, фильтры 14, ключи 15, делитель 16 напряжения, третьи сумматоры 17, источник 18 опорного напряжения, элемент ИЛИ 19
Устройство работает следующим образом.
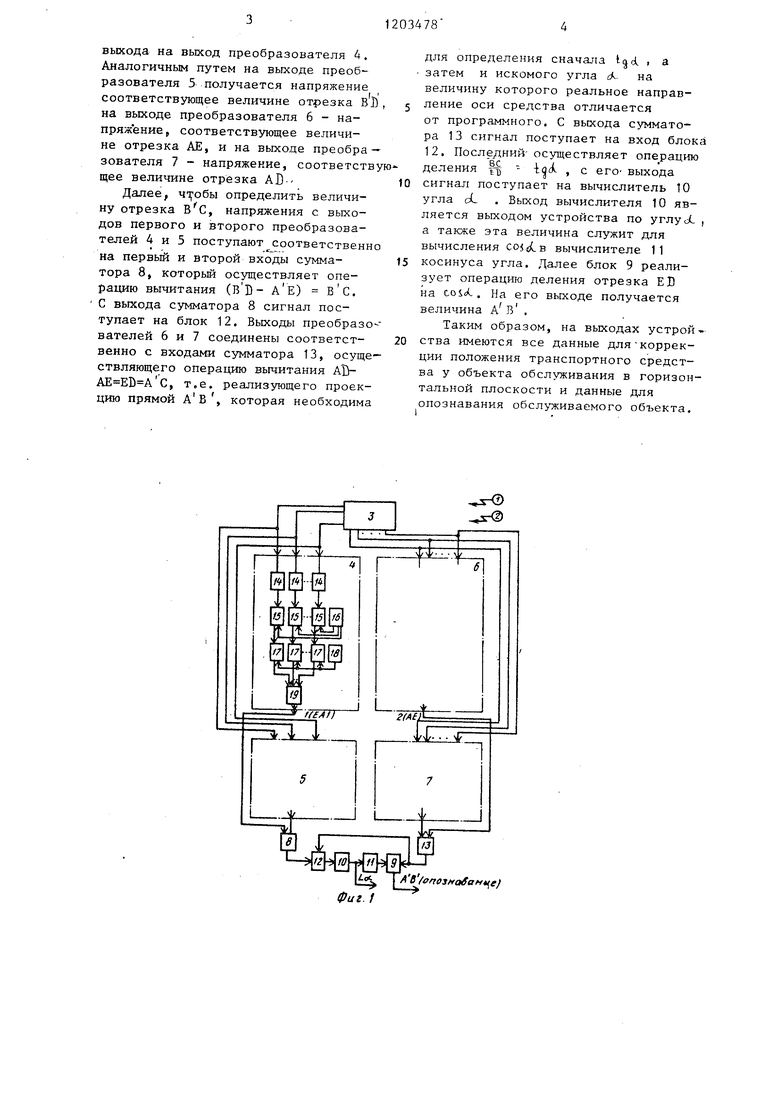
Матрица 3 возбуждается узконаправленными лучами реперных источников 1 и 2, обозначающих положение объекта обслуживания и траспортного средства на трассе и работающих на разных частотах: первые по ходу движения источники 1 у каждого объе та работают на одной час тоте, а вторые источники 2 - на другой. Это необходимо для отличия выходов с возбуждаемых точек матрицы 3 по одной координате.
Если транспортное средство оста новилось у объекта обслуживания точно по программе, то у определенного объекта всегда возбуждаются определенные точки (ячейки) матрицы 3, причем первые источники 1 имеют относительно своего объекта одно и то же положение, т.е. координаты точки А (фиг. 2) постоянны, если средство остановилось точно по программе, а расстояние между источниками 1 и 2 для каждого из объектов разное, что и является признаком данного объекта, который используется для его опознавания.
В реальных условиях транспортное средство у объектов останавливается не точно, реально источник 1 воз203478
буждает матрицу 3 в точке А, а источник 2 - в точке В. Значения координат этих точек получаются на выходах матрицы 3,
5 причем вьпсоды координат по оси У (в виде напряжений) направляют на входы первого и второго преоб- . разователей 4 и 5, каждый выход матрицы 3 соединен с соот10 ветствующими фильтрами 14 первого и второго преобразователей 4 и 5. Фильтры 14 первого преобразователя 4 все одинаковы и настроены на частоту первого источника 1, все фильтt5 ры 14 второго преобразователя настроены .на частоту второго источника 2.
Фильтры 14 третьего преобразователя 6 настроены на частотгу Источника 1, а фильтры четвертого преобразова20 теля 7 - на частоту источника 2. На фильтры 14 третьего и четвертого преобразователей 6 и 7 поступают сигналы от возбуждаемых точек матрицы 3 по оси X. Преобразователи 4-7 анало-25 гичны по конструкции и предназначены для определения величины сдвига точек на матрице 3 (в точке А или В) относительно их программных значений по определенной координате,
30 Таким образом, фильтры 14 первого преобразователя 4 пропускают сигналы, характеризующие положение точки А на матрице 3 по оси У. Сигнал с выхода одного из фильтров 14 поступает на вход соответствующего ключа 15, на второй вход которого подается напряжение с делителя 16, Напряжения делителя 16 подобраны так, что каждому выходу матрицы 3 по
Q оси У соответствует свое напряжение делителя 16 - такям образом выходы матрицы 3 получают отличие друг от друга. С выхода ключа 15 напряжение, соответствующее поло- жению точки А, поступает на вход соответствующего сумматора 17. На вторые входы всех сумматоров 17 подается опорное напряжение от источника 18. Это напряжение соответствует программному значению точки А по координате У и для всех случаев одно и то же,
35
50
На выходе сумматоров 17 образуется напряжение разности, соответст- вующее величине сдвига точки А по координате У, т.е. величина отрезка А Е. Далее это напряжение пос-- тупает на элемент ШШ 19 и с его
выхода на выход преобразователя А. Аналогичным путем на выходе преобразователя 5 получается напряжение соответствующее величине отрезка BD, на выходе преобразователя 6 - напряжение, соответствующее величине отрезка АЕ, и на выходе преобра- зователя 7 - напряжение, соответствущее величине отрезка ЛБ
Далее, чт; обы определить величину отрезка ъ С, напряжения с выходов первого и второго преобразователей 4 и 5 поступают соответственно на первый и второй входы сумматора 8, которьй осуществляет операцию вычитания (B D- Л В) в С. С выхода сумматора 8 сигнал поступает на блок 12. Выходы преобразо вателей 6 и 7 соединены соответственно с входами сумматора 13, осуществляющего операцию вычитания АВ- , т.е. реализующего проекцию прямой А В , которая необходима
для определения сначала Цс1 а затем и искомого угла (- на величину которого реальное направление оси средства отличается от программного. С выхода сумматора 13 сигнал поступает на вход блока
12. Последний- осуществляет операцию
R г 1 /
деления - , с его- выхода
0 сигнал поступает на вычислитель 10 угла oL . Выход вычислителя 10 является выходом устройства по углуо)С , а также эта величина служит для вычисления вычислителе 11
5 косинуса угла. Далее блок 9 реализует операцию деления отрезка ЕБ на tos. На его выходе получается величина А В .
Таким образом, на выходах устрой0 ства имеются все данные для-коррекции положения транспортного средства у объекта обслуживания в горизонтальной плоскости и данные для опознавания обслуживаемого объекта.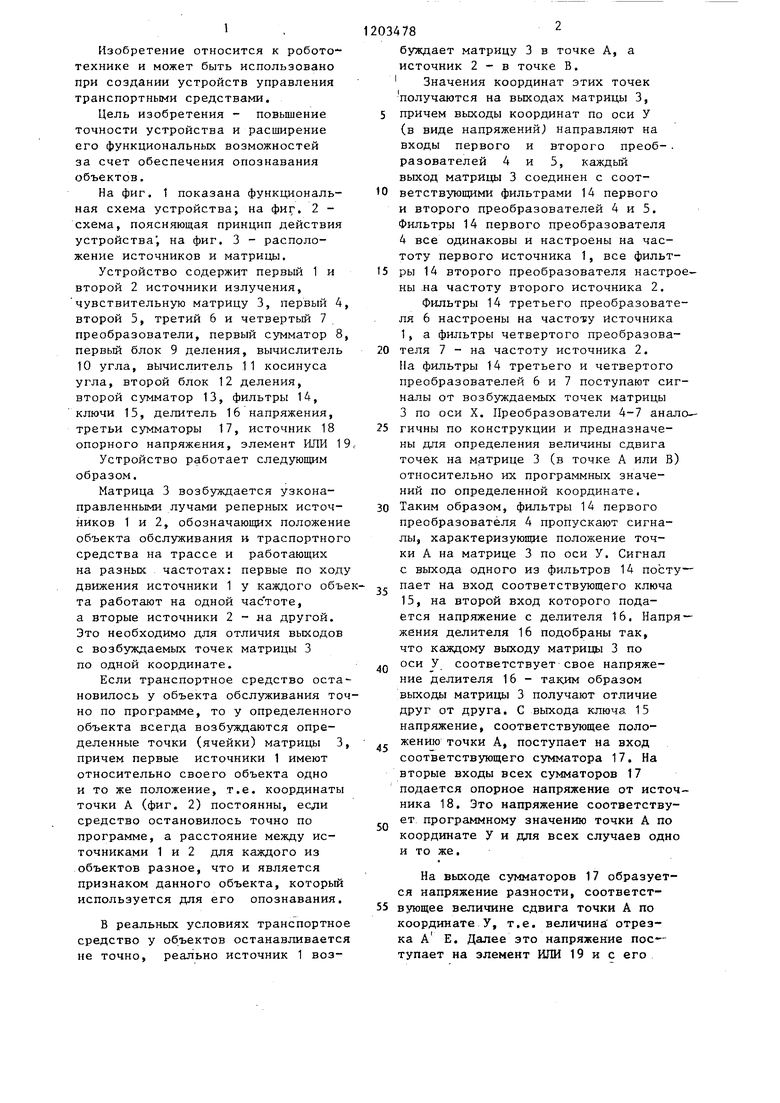
| название | год | авторы | номер документа |
|---|---|---|---|
| ФАЗОРАЗНОСТНАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА С ШИРОКОПОЛОСНЫМ СИГНАЛОМ | 2015 |
|
RU2602506C1 |
| Устройство для моделирования удара твердых тел | 1988 |
|
SU1567889A2 |
| ШИРОКОПОЛОСНАЯ ФАЗОРАЗНОСТНАЯ ЛОКАЛЬНАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2602432C1 |
| Способ измерения скорости движения объекта | 1988 |
|
SU1744652A1 |
| Устройство для определения координат точечных световых объектов | 1983 |
|
SU1113822A2 |
| Устройство для отображения информации на экране электронно-лучевой трубки | 1986 |
|
SU1357996A1 |
| ЛОКАЛЬНАЯ ФАЗОВАЯ РАЗНОСТНО-ДАЛЬНОМЕРНАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2604652C2 |
| Способ измерения скорости движения объекта и устройство для его осуществления | 1988 |
|
SU1672378A1 |
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ЦЕНТРАЛЬНОЙ И РЕГИОНАРНОЙ ГЕМОДИНАМИКИ | 1991 |
|
RU2019128C1 |
| Устройство для считывания графической информации | 1973 |
|
SU667976A1 |

В /опознаван 1 е)
(риг.З
Редактор А.Шишкина
Составитель. Г, Нефедова
Техред И.Асталош Корректор И. Муска
8415/50
о Тираж 862 ВИШГШ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб. д. 4/5
Филиал ШШ Патент, г. Ужгород, ул. Проектная, 4
Подписное
| 1979 |
|
SU826275A1 | |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для управления подвижным манипулятором | 1980 |
|
SU941932A2 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
