Изобретение относится к вычислительной технике и может быть использовано, например, в тренажерах при имитации движения транспортных средств в условиях наличия в зоне вижения неподвижных преград или других движущихся транспортных средств и является дополнительным к основному вт.св. № 1381341.
Цель изобретения - расширения функциональных возможностей устройства.
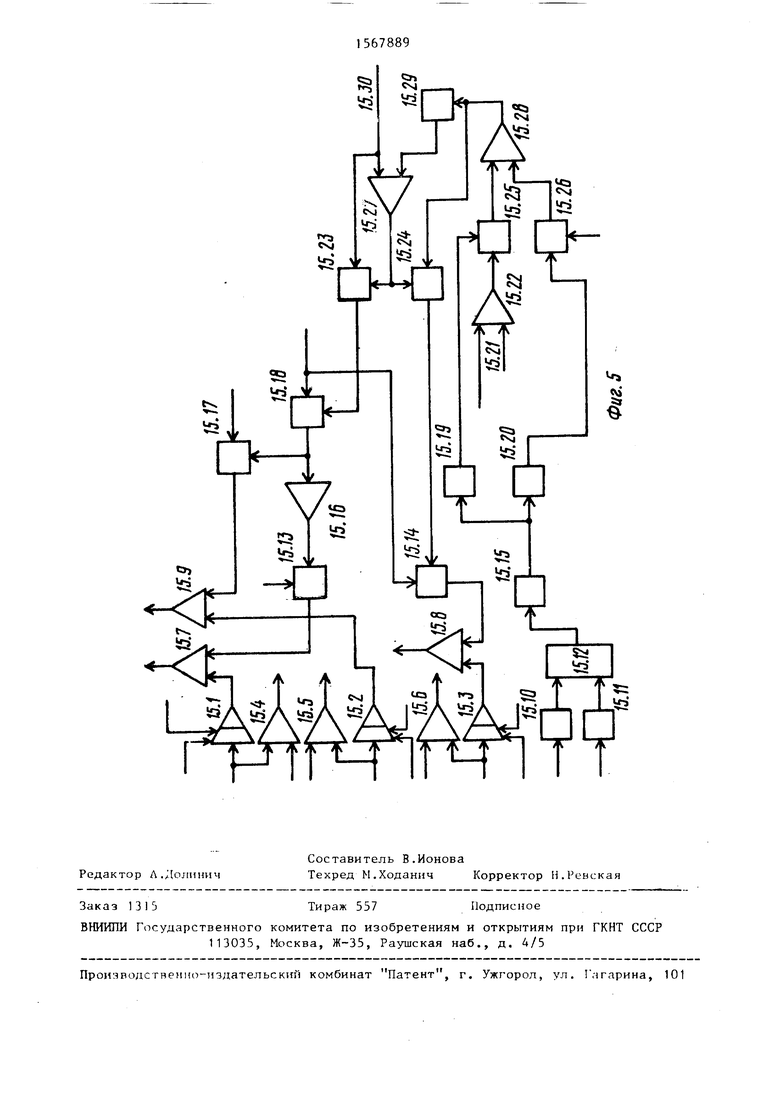
На фиг.1 представлена блок-схема стройства; на фиг.2 - блок-схема бло ков 2 и 14; на фиг.3 - блок-схема вычислителя 3; на фиг.4 - блок-схема преобразователя 5; на фиг.5 - блок- схема вычислителя 15.
Устройство содержит блок 1 синхронизации, блок 2 моделирования движения первого тела, содержащий делители 2.1-2.3, суммирующие интеграторы 2.4- 2.6, интеграторы 2.7-2.9, инвертируюие усилители 2.10-2.12, сумматоры 2.13-2.15, вычислитель 3 последовательного ударного состояния первого тела, включающий интегрирующие усилители 3.1-3.3, суммирующие усилители 3.4-3.6, дифференциаторы 3.7-3.8, блок деления 3.9, формирователь 3.10 ункции арктангенса, формирователь
3.11функции косинуса, формирователь
3.12функции синуса, суммирующий усиитель 3.13, формирователь 3.14 функции синуса, формирователь 3.15 функции косинуса, умножители 3.16 и 3.17, операцио нный усилитель 3.18, умножители 3.19-3.21, суммирующий усилитель 3.22, источник 3,23 опорного напряжения, умножители 3.24 и 3.25, суммирующие усилители 3.26 и 3.27, масштабный усилитель 3.28, суммирующий усилитель 3.29, умножитель 3.30, операционный усилитель 3.31, источник 3.32 опорного напряжения, суммирующий усилитель 3.33, блоки деления 3.34 и 3.35, умножитель 3.36, операционный усилитель 3.37, квадратор 3.38, первый задатчик 4 текущей координаты контура первого тела, преобразователь 5 координат контура первого тела, содержащий инверторы 5.1-5.3, сумматоры 5.4-5.6, синусный преобразователь 5.7 косинусный преобразователь 5.8, синус ный преобразователь 5.9, косинусный преобразователь 5.10, перемножитель 5.11-5.14; инвертор 5.15, перемножитель 5.16-5.19, сумматоры 5.20 и 5.21
10
5
0
5
0
инвертор 5.22, второй задатчик 6 текущей координаты контура первого тела, первый задатчик 7 текущей координаты контура второго тела, первый компаратор 8, второй задатчик 9 текущей координаты контура второго тела, второй компаратор 10, элемент И 11, блоки 12 и 13 памяти, блок 14 моделирования движения второго тела, вычислитель 15 послеударного состояния второго тела.
Вычислитель 15 содержит интегрирующие усилители 15.1-15.3, суммирующие усилители 15.4-15.9, дифферанциа- торы 15.10 и 15.11, блок 15.12 деления , умножители 15.13 и 15.14, формирователь 15.15 функции арктангенса, инвертор 15.16, умножители 15.17 и 15.18, формирователь 15.19 функции косинуса, формирователь 15.20 функции синуса, источник 15.21 опорного напряжения, суммирующий усилитель 15.22, умножители 15.23-15.26, суммирующие усилители 15.27 и 15.28, квадратор 15.29, источник 15.30 опорного напряжения и блоки 16 и 17 памяти.
Блок 2 моделирования движения первого тела решает следующие дифференциальные уравнения
m,k Fx,
m,
1
U ;
5
0
5
m.
(2)
p.V. M
где X , Y1, ty, - текущие координаты
центра тяжести и угол курсового разворота, отсчитываемые относительно неподвижной (земной) системы координат и относящиеся к первому телу;
Х, Y, ф, - текущие значения скоростей упомянутых параметров, т,- масса с. первого тела; |7, - радиус инерции первого тела;
50
Г
силы и момент, приложенные к первому телу.
55
Блок 14 моделирования движения второго тела решает следующие дифференциальные уравнения:
т2Х2
5 г Fyz
mipzV M2
(2)
51567889
де Х2, Y2, - текущие координаты
центра тяжести и угол курсового разворота, отсчитываемые относи - тельно неподвижной (земной) системы координат и относящиеся ко второму телу; текущие значения ско- JQ ростей упомянутых параметров;
масса второго тела; радиус инерции второго тела;
Xt,Y2,
m
t
г
15
те ви
но сл
телом системе координат, в соответстг вии со следующими формулами
Ј -(X,-X4)ein + ()cosV2 + + X sin((rt-tfc) -t- Y cos((rt-V2);(13)
(X,-X2)cis(+(Y1-Y/2) +X cos(-V2)-Y sin(Q,-V2). (Ц)
Вычислитель 15 вычисляет послеударное состояние второго тела согласно следующим формулам

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования удара тела о неподвижную преграду | 1985 |
|
SU1381341A1 |
| ЭНЕРГОСБЕРЕГАЮЩАЯ СИСТЕМА УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2012 |
|
RU2498496C1 |
| Устройство для имитации движения судна вблизи берега | 1982 |
|
SU1084830A1 |
| Датчик угла крена для вращающегося объекта | 2023 |
|
RU2811808C1 |
| Датчик угла крена для вращающегося объекта | 2024 |
|
RU2822783C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО КОНТРОЛЯ ПЕРЕМЕЩЕНИЯ СКЛАДСКИХ ГРУЗОВЫХ ПЛАТФОРМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2619843C1 |
| Электронная модель удара | 1977 |
|
SU658575A1 |
| Устройство для моделирования ударных систем | 1973 |
|
SU451102A1 |
| Тренажер оператора грузоподъемных машин | 1982 |
|
SU1081645A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ГЕОМЕТРИЧЕСКОГО ЦЕНТРА ОБЪЕКТА | 1985 |
|
SU1380590A1 |


Изобретение относится к вычислительной технике и может быть использовано, например, в тренажерах при имитации движения транспортных средств в условиях наличия в зоне движения неподвижных преград или других движущихся транспортных средств и является усовершенствованием известного решения по авт.св. N 1381341. Цель изобретения - расширение функциональных возможностей устройства. Устройство по авт.св. N 1381341 дополнительно содержит второй вычислитель 15 послеударного состояния, третий и четвертый 16, 17 блоки памяти, блок 14 моделирования движения второго тела. В процессе моделирования движения тел наступает момент, когла контуры тел соприкасаются в какой-либо точке, общей для обоих контуров. В этот момент координаты точки соприкасания, взятой на контуре первого тела и отнесенной к связанной с этим телом системе координат, совпадают с координатами этой же точки, вычисленными в связанной со вторым телом системе координат. В результате срабатывают компараторы 8 и 10, что, в свою очередь, приводит к срабатыванию элемента 11 и связанного с ним блока 1. Под воздействием выходного сигнала блока 1 вычислители 3 и 15 вычисляют послеударное состояние тел, которое в виде начальных условий устанавливается на соответствующих интеграторах блоков 2 и 14 моделирования движения тел. 5 ил.
V «г
MZ - силы и момент, приложенные ко второму телу.
Вычислитель 3 вычисляет послеудар- 20 ое состояние первого тела согласно ледующим формулам:
XfK - Х + S,sini| ; S
Х(К
Vu
Y, - S,cos(f; 4, - Ц,
(3) (4) (5)
25
К)р.
г К) г,
х;
X;
(6)
(7)
Г , X,)sincp+ (Y, -Y2)cosq +
(V, -Oft).;
X cosoi + Ysinot;
ц, + Л;
arctg
4t dx
(8) (9) (10)
(ID (12)
f
К - коэффициент восстановления
скорости;
ОС - угол между касательной к , контуру первого тела и продольной осью последнего; угол между касательной к контуру первого тела и неподвижной (земной) осью (текущие координаты точки контура первого тела); продольный размер первого тела.
реобразователь 5 вычисляет текукоординаты if,, 1, точки контура пертела, взятые вывязанной со вторым
0
Х2к Х2 - St sinlf; Y4K - Yt + S cost/;
V««- w+ Ц; s,.i iWЈix;
5
22
r (H-K)rt
Й+ rf
X;
0
r2 - cos|3 + sin/3;
Г -Г-г
/ arctg jp ;
(15) (16) (7)
(18) (19)
(20) (21)
(22)
35
40
где rt - угол между касательной к контуру второго тела и продоль- - ной осью последнего; - текущие координаты точки контура второго тела; i z - продольный размер второго
тела.
Работу устройства рассмотрим на t примере удара тел, поверхности которых абсолютно гладкие.
За счет действия сил FX) , Fuf и 45 момента М, и сил F(2, F u 2 и момента М, приложенных соответственно к первому и второму телам, последние меняют свое пространственное положение. Сигналы F , F и М поступают на 50 входы интеграторов 2.4, 2.5, 2.6 соответственна. При этом блок 2 моделирования движения (фиг.2) в соответствии с уравнениями (1) с одной стороны на выходах интеграторов 55 2.4.2.5, 2.6 формирует сигналы, пропорциональные инверсным значениям составляющих скорости центра тяжести первого тела -Y и угловой скорости Q, , на выходах интеграторов
Аналогично в соответствии с урав- нениями (2) блок 14, моделирования движения второго тела формирует сигналы -Хг, -Yj, tf,, поступающие на входы вычислителя 15 послеударного состояния второго тела, и группу сиг- налов Х2, Y, (j/j,, поступающие на входы преобразователя 5 координат. С момента включения устройства задатчики 4,6 и 7,9 на своих выходах формируют сигналы, пропорциональные текущим ко-- ординатам точек контуров тел. По сигналам блоков моделирования движения 2 и 14 и задатчиков 4 и 6 преобразователь 5 производит вычисление текущих координат точки контура первого тела в системе координат, связанной со вторым телом. Алгоритм работы преобразователя 5 непосредственно следует из блок-схемы (фиг.4), реализующей зависимости (13) и (14). Процессы фор мирования и преобразования координат осуществляются непрерывно. При этом координаты точек контуров тел формируются последовательно в направлении; корма - левый борт - нос - правый борт - корма - и т.д.
Задатчики координат 4,6 и 7,9 непрерывно формируют текущие значения координат точек контуров первого и второго тех X, Y, if , Ј .
За первую половину цикла идентифицируются точки.контура левого борта в направлении от кормы к носу, а затем (за вторую половину цикла) идентифицируются точки контура правого борта в направлении от носа к корме. Такое направление обегания контуров (по ходу часовой стрелки) сохраняется и в дальнейшем для последующих циклов. Координаты X, Y точек конту- ра первого тела подаются на входы преобразователя 5 и на входы блоков 12 и 13 памяти, а координаты точек контура второго тела подаются на входы компараторов 8 и 10 и на входы блоков 16 и 17 памяти. Преобразователь 5 по значениям X, Y, характеризующим текущее положение точки на i контуре первого тела, а также по значениям Х(, Y0 Хг, Y2, Cf, , (2 , характеризующим пространственное положение тел, вычисляет текущие координаты , Ч, точек контура первого тела в системе координат, связанного со вторым телом. Вычисленные значения координат Ј( , (7, подаются на входы компараторов Я и 10 соответственно. В идеальном случае в момент удара координаты , 2 , сформированные задатчиками 7 и 9, и координаты, вычисленные преобразо- зателем 5, будут совпадать с коорди- чатами точки соприкасания тел.
На выходах блока 1 формируется одиночная серия последовательных импульсов U, R, U. Импульсом U останавливается процесс решения дифференциальных уравнений, описывающих движения первого и второго тел. При этом суммирующие интеграторы 2.4, 2.5 2.6 и суммирующие интеграторы 14.4, 14.5, 14.6, входящие в состав блоков 2 и 14 моделирования движения тел, переводятся из режима Интегрирование в режим Слежение. Влоки 12, 13, 16, 17 памяти по сигналу И запоминают мгновенные значения текущих координат точек контуров тел X, Y, , у , а интеграторы 3.1, 3.2, 3.3 вычислителя Зи 15.1, 15.2, 15.3 вычислителя 15 из режима Слежение переводятся в режим Запоминание и запоминают значения величины X,, Y,, (у, и Х2, Y2 , (у , имеющихся на данный момент на выходах интеграторов 2.4, 2.5, 2.6 и 14.4, 14.5, 14.6. Значения вепичин X, Y, , Ч , запомненные блоками 12, 13, 16, / памяти соответствуют точке соприкасания тел. Вычислители 3 и 15 послеударных состояний тел в соответствии с соотношениями (3) - (12 и (15) - (22) определяют послеударные состояния тел, характеризуемые величинами Х, Y,,, ff- гк п ля первого тела и величинами Х, Y , ty 4% для второго тела. Блок-схема, реализующая алгоритм вычисления (3) - (12), приведена на фиг.З, а блок-схема, реализующая алгоритм вычисления (15)- (22), приведена на фиг.5. После вычисления величин Х(|(, Y,K,(|k, , и X4t, Y, , Q/ , а также после установки последних в качестве начальных условий интеграторов 2.4, 2.5, 2.6, и 14.4, 14.5, 14.6 блоков 2 и 14 моделирования движения, сигналом R блока 1 блоки 12, 13, 16, 17 памяти и ин- теграторы 3.1,3.2, 3.3и15.1, 15.2,
В случае моделирования удара о неподвижную преграду блоки 14, 15, 16, 17 от остальных блоков отключаются.
Формула изобретения
Устройство для моделирования удара твердых тел по авт.св. № 1381341, отличающееся тем, что, с целью расширения функциональных возможностей, оно снабжено третьим и четвертым блоками памяти, блоком моделирования движения второго тела и вторым вычислителем послеударного состояния, выполненным в виде трех интегрирующих усилителей,девяти сум- мирующих усилителей, двух дифференциаторов, блока деления, формирователя функций арктангенса, синуса и косинуса, шести умножителей, операционного усилителя, двух источников опор- ных напряжений, двух делителей и квадратора, первые входы интегрирующих усилителей соединены с первым, вторым и третьим информационными входами вычислителя соответственно, вто- рые входы соответственно соединены с первым и вторым управляющими входами вычислителя, а выходы соединены с т первыми входами первых трех суммирующих усилителей, вторые входы которых подключены к выходам первого, второго и третьего умножителей, а выходы являются первым, вторым и третьим выходами вычислителя, входы дифференциаторов соединены с четвертым и пятым информационными входами вычислителя, , а его выходы подключены к входам блока деления, выход которого соединен с входом формирователя функции арк50 5 0
5
0 5 0 5 0 с
тангенса, к выходу которого подключены входы формирователей функции косинуса и синуса, входы четвертого суммирующего усилите i соединены с входом первого дифференциатора и первым источником опорного напряжения, а выход - с первым входом четвертого умножителя, второй вход которого подключен к выходу формирователя функции косинуса, а выход - к первому входу пятого суммирующего усилителя, входы которого соединены с входом второго дифференциатора и с выходом формирователя функции синуса, первый вход первого умножителя соединен с одиннадцатым информационным входом вычислителя , а второй вход - с выходом первого операционного усилителя, вход которого соединен с выходом шестого умножителя и первым входом второго умножителя, второй вход которого соединен с десятым входом вычислителя, первые входы третьего и шестого умножителей подключены к девятому информационному входу вычислителя, а вторые входы соединены с выходами дели- телей, первые входы которых соединены с выходом шестого суммирующего усилителя, первый вход которого подключен к второму источнику опорного напряжения и к второму входу второго делителя, а второй вход - к выходу квадратора, вход которого соединен с выходами пятого суммирующего усилителя, и с вторым входом первого делителя, первые входы седьмого, восьмого и девятого суммирующих усилителей соединен с первыми входами трех интегрирующих усилителей, вторые входы являются шестым, седьмым и восьмым информационными входами вычислителя, а выходы - его информационными выходами, а блок моделирования движения второго тела выполнен в виде двух первых управляющих входов, подключен - ных к первым двум выходам блока синхронизации и к управляющим входам второго вычислителя послеударного состояния и третьего и четвертого блоков памяти, третьего управляющего входа, подключенного к третьему выходу блока синхронизации, трех информационных входов, соединенных с выходами второго вычислителя послеударного состояния, первых трех информационных выходов, соединенных с его первыми тремя информационными входами, а остальные его выходы соединены с
шестым, седьмым и восьмым входами преобразователя координат контура тела, информационные входы третьего и четвертого блоков памяти соединены с выходами третьего и четвертого задатчиков текущих координат контура второго тела, а выходы - с четвертым и пятым информационными входами второго вычислителя послеударного состояния,
Фиг. 2
первые три информационные выхода ко- торого соединены с седьмым, восьмым и девятым информационными входами первого вычислителя послеударного со1- стояния, а шестой, седьмой, восьмой, девятый, десятый и одиннадцатый информационные входы с первыми шестью информационными выходами первого вы числителя послеударного состояния.
Фаг.З
r prfft npTi т т
| Устройство для моделирования удара тела о неподвижную преграду | 1985 |
|
SU1381341A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
