(54)УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОДВИЖНЫМ МАНИПУЛЯТОРОМ
12
Изобретение относится к области робототехники и может быть использо;вамо при создании автоматизированных технологических комплексов с ПОДВИЖНБ1МИ манипуляторами.
По основному авт.св. № 826275 известно устройство для управления подвижным манипулятором, которое содержит последовательно соединенные датчики позиций, блок управления перемещением и привод деремещения, последовательно соединенные датчики технологического оборудования, блок отработки команд, привод маннпулятЪра, а также блок задания программы, первый выход .которого соединен со вторым входом блока управления перемещением, а также последовательно соединенные датчик тормозного пути и блок коррекции, второй-вход которого соединен со вторым В.ЫХОдом блока задания програквлы, выход блока коррекции соединен со входом блока отработки команд, а вход датчика тормозного пути соединен со BtopoM выходом блока управления перемещением 11} ,
Недостатком известного устройства являются его охтраиичённые функци ональные возможности, обусловленные
тем,что для перемещения манипулятора необходимы технические направляющие.
Цель йзобрётения - расширение функциональных возможностей устройства.
Поставленная цель достигается тем, что устройство содержит первый измеритель расстояния до объекта и последовательно соединенные второй
10 измеритель расстояния до объекта, вычитатель и преобразователь напряжения, выход которого подключен к третьему входу блока коррекции, четвертым входом соединенного с выходом
15 вычитателя, второй вход которого подключен к выходу первого измерителя расстояния до объекта.
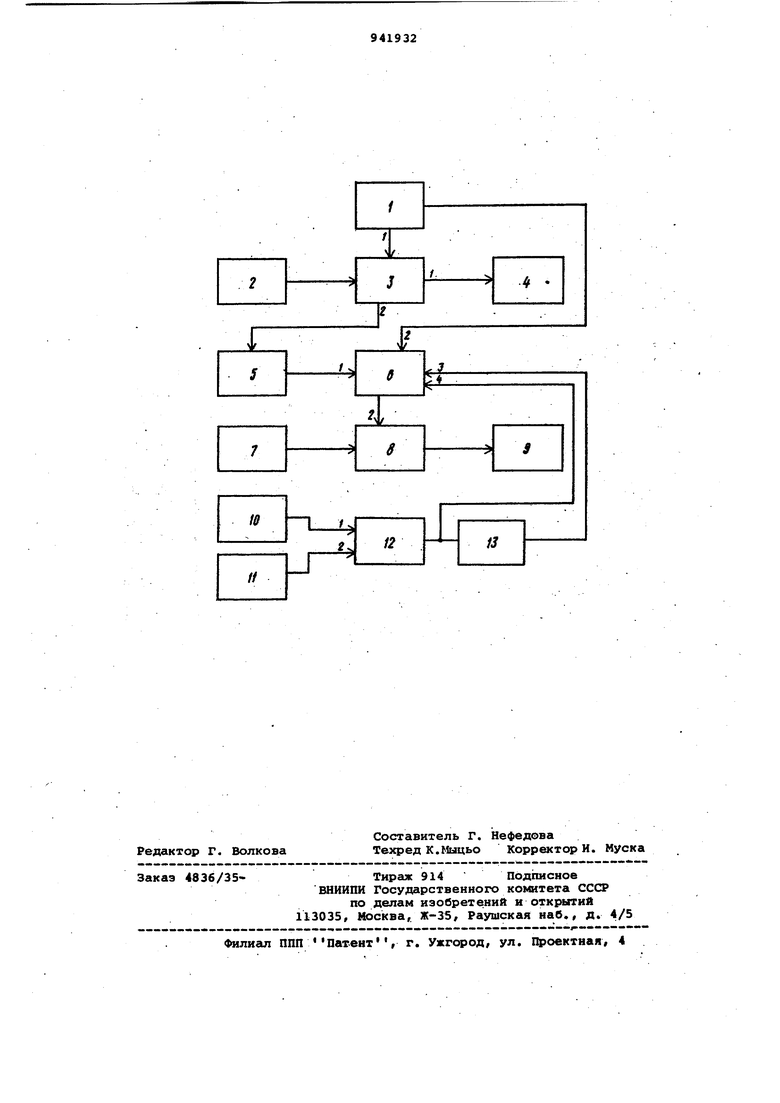
На чертеже представлена функцио20нальная схема предлагаемого устройства.
Устройство содержит блок 1 ния программы, датчики 2 позиций, блок 3 управления перемещением, при25вод 4 перемещения, датчики 5 тормозного пути, блок 6 коррекции, датчики 7 технологического оборудования, блок 8 обработки команд, привод 9 манипулятора , первый и второй изме30рители Ю и 11 расстояния до объекта
соответственно, вычитатель 12, преобразователь 13 напряжения.
Устройство работает следующим образом.
Из блока 1 в блок 3 упргшления перемещением поступает адрес позиции, к которой должен переместиться манипулятор. На оснований этой инфорМсщии о текущем положении, получае я мой о.т датчиков 2 позиций блок 3 управления перемещением выдает соответ ствующие управляющие сигналы на привод 4 перемещения. При подходе к нужной позиции по сигналу соответствующего датчика 2 позиций, блок 3 управления перемещением вырабатывает команду на торможение и включает дат- чик 5 тормозного пути. Привод 4 перемещения тормозит подвижной манипулятор, который останавливается в некоторой точке, в районе, где находится обслуживаемое оборудование. Истинные координаты этой- точки относительно обслуживаемого оборудования в направ лении движения манипулятора определяются при помощи датчика 5 тормозного пути, а в направлении,перпендикулярн движению и по углу между осью манипулятора и объектом - с помощью измерителей 10 и 11, вычитателя 12 и преобразователя 13.
С помощью одного измерителя (например, 10)- определяется истинное значение расстояния от центра координат манипулятора до объекта, а разность показанных первого и второго измерителей 10 и 11 позволяет определить угол, на который должен быть повернут схват манипулятора в горизонтальной плоскости относительно нулевого (программного) значения, чтобы выйти в заданную точку позиционирования. .
Полученные, таким образом, истинные координаты положения подвижного манипулятора относительно обслуживаемого оборудования, определенные с помощью датчиков 5 тормозного пути и измерителей 10 и 11 с вычитате.- : лем 12 и преобразователем 13 поступают в блок 6 коррекции программ, гд в программу рабочих движений манипуЛятора вносятся необходимые поправки.
При поступлении сигналов готовности от датчиков 7 технологического оборудования блок 8 отработки команд управляет приводом 9 манипулятора в соответствии с программой работы ма, нипулятора на данном оборудовании.
бкррректированной с учетом истинного положения манипулятора.
Измерители 10 и 11 (ультразвуко- вые,.электронно-оптические или механические) расположены на одном борту подвижного манипулятора: один - напротив центра координа манипулятора другой - удален от первого на некоторое определенное заранее расстояние вперед или назад по ходу движения манипулятора на одной горизонтальной прямой с пярвым измерителем. Диаграммы направленности приемо-излучакщих устройств обоих измерителей направлены строго перпендикулярно осевой линии манипулятора.
Вычитатель 12 определяет разность между величинефш расстояний,-измеренными первым и вторым измерителями 10 и 11. В преобразователе 13 эта раность преобразуется в угол, который равен углу между осевой линией истинного положения манипулятора и рабочей стороной объект На основании имеющихся величин истинного и заданного программой углов оси схвата относительно объекта в блоке б коррекции вырабатывается поправка по углу , которая далее вносится в рабочую программу для коррекции положения оси схвата.
Применение изобретения позволит за счет исключения механических направляющих расширить функциональные возможности .устройства.
Формула изобретения.
Устройство для управления подвижным манипулятором по авт. св. №82627 отличающееся тем,что, с целью расширения функциональных возможностей устройства, оно содержит первый измеритель расстояния до объекта и последовательно соединенные второй измеритель расстояния до объекта, вычитатель и преобразователь напряжения, ввлход которого подключен к третьему входу блока коррекции, четвертым входом соединенного с выходом вычитателя, второй вход которого подключен к выходу первого измерителя расстояния до объекта.
Источники информации, принятые во внимание при зкспертизе
1. Авторское свидетельство СССР 826275, кл. Б 25 J 9/00, 1979 (прототип) .
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления схватом манипулятора | 1985 |
|
SU1337250A1 |
| Устройство для программного управления транспортным механизмом | 1983 |
|
SU1087959A1 |
| Система управления транспортным средством | 1987 |
|
SU1550480A1 |
| Устройство для управления манипулятором | 1979 |
|
SU938261A1 |
| Устройство управления схватом манипулятора | 1987 |
|
SU1442395A2 |
| Устройство для управления робото-технологическим комплексом | 1978 |
|
SU930254A1 |
| Устройство управления укладчиком листового стекла | 1988 |
|
SU1551664A1 |
| Устройство для программного управления с коррекцией программы | 1986 |
|
SU1352457A1 |
| Устройство управления манипулятором | 1984 |
|
SU1168898A1 |
| УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ | 2015 |
|
RU2604555C1 |