2. Устройство rro п. 1, о т л и ч а ю ц « ее я тем, что вычислитель дисперсии ошибки рассогласования содердсит счетчик, первый и второй форгшрователи импульсов и последовательно соединенные реверсивный счетчик, квадратор, сумматор, первый регистр сдвига, преобразователь кода и вторЫ регистр сдвига, выход которого является выходом вычислителя дисперсии ошибки рассогласования, . один из входов реверсивного счетчике является первым входом вычислителя ошибки рассогласования, другой вход реверсивного счетчика, соединенный с входами второго формирователя импульсов и счетчика, является вторым входом вычислителя дисперсии ошибки рассогласования, выходы первого и второго формирователей импульсов подключены соответственно к управляющим входам первого и второго регистров сдвига, выход счетчика соединен с
3822
входом первого формирователя импульсов, выходы первого регистра сдвига подключены к соответствзпощим входам сумматора. .
3. Устройство поп, 1, отли14 .а ю п е е с я тем, что цифровой фильтр содержит инвертор кода и последовательно соединенные элемент ШШ, сумматор, регистр и регистр сдвига, выход которого является выходом цифрового фильтра, один из входов элемента ИЛИ являемся входом фильтра, один из входов регистра сдвига, является первым управляющим входом цифрового фильтра, вход регистра, соединенный с другим входом регистра сдвига, является вторым управляющим входом 1щфрового фильтра, выходы регистра подключены к соответствукяцим входам сумматора, выход регистра сдвига соединен с входом инвертора кода, выход которого под|КЛ1очен к другому входу элемента ИЛИ.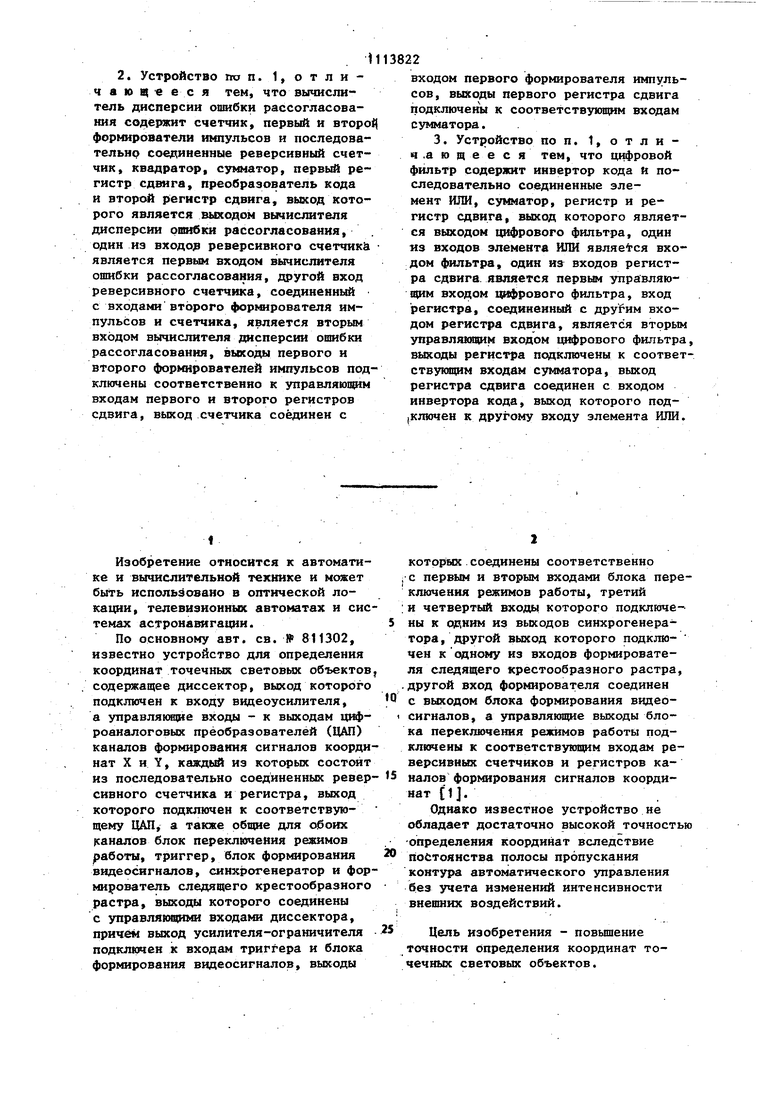

| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕЛЕВИЗИОННЫЙ КООРДИНАТОР | 1987 |
|
SU1521242A1 |
| Устройство для определения коор-диНАТ ТОчЕчНыХ СВЕТОВыХ Об'ЕКТОВ | 1978 |
|
SU811302A1 |
| Устройство для определения координат точечных световых объектов | 1981 |
|
SU991455A2 |
| ИЗМЕРИТЕЛЬ КООРДИНАТ ПОДВИЖНЫХ ОБЪЕКТОВ | 1986 |
|
SU1436846A1 |
| Телевизионное следящее устройство | 1989 |
|
SU1699013A1 |
| ТЕЛЕВИЗИОННЫЙ АДАПТИВНЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1988 |
|
SU1623536A1 |
| ТЕЛЕВИЗИОННЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1986 |
|
SU1478978A1 |
| Сканирующее устройство для воспроизведения изображения образца | 1984 |
|
SU1236568A1 |
| ТЕЛЕВИЗИОННЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1985 |
|
SU1454225A1 |
| Устройство для отображения информации на экране цветного видеоконтрольного блока | 1988 |
|
SU1529280A1 |

1. УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ТОЧЕЧНЫХ СВЕТОВЫХ ОБЪЕКТОВ по авт. св. № 811302, отличающееся тем, что, с целью повьпиения точности определения в нем каждый из каналов формирования сигналов координат содержит вычислитель дисперсии ошибки рассогласования и цифровой фильтр, вход которого подключен к выходу реверсивного сцетчика, а выход - к входу регистра, входы вычислителя дисперсии ошибки рассогласования подключены к выходам блока переключения режимов работы, а выход - к первому управляющему входу цифрового фильтра, второй управляющий вход которого соединен с соответствующим выходом блока переключения режимов работы.
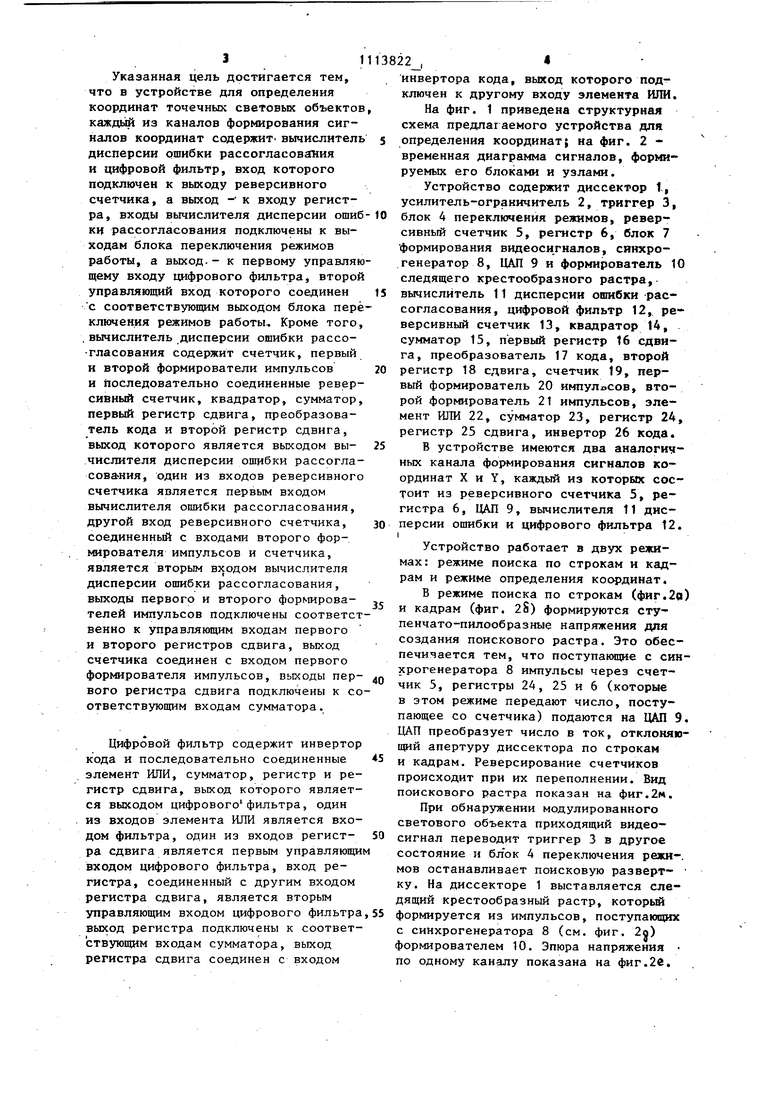
Изобретение относится к автоматике и вычислительной технике и может быть использовано в оптической локации, телевизионньк автоматах и сис темах астронавигации. По основному авт. св. № 811302, известно устройство для определения координат точечных световых объектов содержащее диссектор, выход которого подключен к входу видеоусилителя, а управляющие входы - к выходам цифроаналоговых преобразователей (ЦАП) каналов формирования сигналов коорди нат X и Y, каждь из которых состоит из последовательно соединенных ревер сивного счетчика и регистра, выход которого подключен к соответствующему ЦАП а также общие для обоих каналов блок переклкгаения режимов работы, триггер, блок формирования видеосигналов, синхрогенератор и фор мирователь следящего крестообразного растра, выходы которого соединены с управлякм ими входами диссектора, причем выход усилителя-ограничителя подключен к входам триггера и блока формирования видеосигналов, выходы которБОс соединены соответственно с первым и вторым входами блока переклюгчения режимов работы, третий и четвертый входы которого подключены к одним из выходов синхрогенератора, другой выход которого подключен к одному из входов формирователя следящего крестообразного растра, другой вход формирователя соединен с выходом блока формирования видеосигналов, а управляющие выходы блока переключения режимов работы подключены к соответствующим входам реверсивных счетчиков и регистров каналов формирования сигналов координат С1 . Однако известное устройство не обладает достаточно высокой точностью определения координат вследствие постоянства полосы пропускания контура автоматического управления без учета изменений интенсивности внешних воздействий. Цель изобретения - повышение точности определения координат точечных световых объектов. 3 Указанная цель достигается тем, что в устройстве для определения координат точечных световых объектов каждаШ из каналов формирования сигналов координат содержит- вычислитель дисперсии ошибки рассогласования и цифровой фильтр, вход которого подключен к выходу реверсивного счетчика, а выход - к входу регистра, входы вычислителя дисперсии ошиб ки рассогласования подключены к выходам блока переключения режимов работы, а выход.- к первому управляю щему входу цифрового фильтра, второй управляющий вход которого соединен с соответствующим выходом блока пере ключения режимов работы. Кроме того .вычислитель дисперсии ошибки рассогласования содержит счетчик, первый и второй формирователи импульсов и последовательно соединенные реверсивный счетчик, квадратор, сумматор первый регистр сдвига, преобразователь кода и второй регистр сдвига, выход которого является выходом вы.числителя дисперсии ошибки рассогласования, один из входов реверсивного счетчика является первым входом вычислителя ошибки рассогласования, другой вход реверсивного счетчика, соединенный с входами второго фор в poвaтeля импульсов и счетчика, является вторым входом вычислителя дисперсии ошибки рассогласования, вьпсоды первого и второго формирователей импульсов подключены соответст венно к управляющим входам первого и второго регистров сдвига, выход счетчика соединен с входом первого формирователя импульсов, выходы первого регистра сдвига подключены к со ответствующим входам сумматора. Цифровой фильтр содержит инвертор кода и последовательно соединенные элемент ИЛИ, сумматор, регистр и регистр сдвига, выход которого является выходом цифровогофильтра, один из входов элемента ИЛИ является входом фильтра, один из входов регистра сдвига является первым управляющи входом цифрового фильтра, вход регистра, соединенный с другим входом регистра сдвига, является вторым управляющим входом цифрового фильтра выход регистра подключены к соответствующим входам сумматора, выход регистра сдвига соединен с входом 2, инвертора кода, выход которого подключен к другому входу элемента ИЛИ. На фиг. 1 приведена структурная схема предлагаемого устройства для определения координат; на фиг. 2 временная диаграмма сигналов, формируемых его блоками и узлами. Устройство содержит диссектор 1., усилитель-ограничитель 2, триггер 3, блок 4 переключения режимов, реверсивный счетчик 5, регистр 6, блок 7 формирования видеосигналов, синхрогенератор 8, ЦАП 9 и формирователь 10 следящего крестообразного растра,вычислитель 11 дисперсии ошибки рассогласования, цифровой фильтр 12, реверсивный счетчик 13, квадратор 14, сумматор 15, первый регистр 16 сдвига, преобразователь 17 кода, второй регистр 18 сдвига, счетчик 19, первый формирователь 20 импулосов, второй формирователь 2t импульсов, элемент ИЛИ 22, су мматор 23, регистр 24, регистр 25 сдвига, инвертор 26 кода. В устройстве имеются два аналогичных канала формирования сигналов координат X и Y, каждый из которых состоит из реверсивного счетчика 5, регистра 6, ЦАП 9, вычислителя 11 дисПерсии ошибки и цифрового фильтра 12. Устройство работает в двух режимах: режиме поиска по строкам и кадрам и режиме определения координат. В режиме поиска по строкам (фиг.2о) и кадрам (фиг. 2S) формируются ступенчато-пилообразные напряжения для создания поискового растра. Это обеспечивается тем, что поступающие с синхрогенератора 8 импульсы через счетчик 5, регистры 24, 25 и 6 (которые в этом режиме передают число, поступающее со счетчика) подаются на ЦАП 9. ЦАП преобразует число в ток, отклоняющий апертуру диссектора по строкам и кадрам. Реверсирование счетчиков происходит при их переполнении. Вид поискового растра показан на фиг.2м. При обнаружении модулированного светового объекта приходящий видео- сигнал переводит триггер 3 в другое состояние и блЪк 4 переключения режи-. мов останавливает поисковую разверт- ку. На диссекторе 1 выставляется следящий крестообразный растр, который формируется из импульсов, поступающих с синхрогенератора 8 (см. фиг. 2д) формирователем 10. Эпюра напряжения по одному каналу показана на фиг.2е. $f При обнаружении искомого источника, а именно при опознавании видеосигнала (см. фиг. 2) по нескольким селективным признакам (частоте, фазе амплитуде), блок 7 формирования видеосигнала вьадает потенциал логической 1 (см. фиг. 2г), переводящий устройство в режим -определения координат. При этом на управляющие входы регистров 24, 25 к в поступает потенциал логического О, и р регистре 6 запоминается число грубо определенной координаты в поиске. Цифровой фильтр 12включается в режим фильтрации координат, вычислитель 11 дисперсии вычисляет дисперсию ошибки рассогласования, а изображение точечного .модулированного . светового объекта сканируется крест образным растром (см. фиг. 2ji) . Поступающ - е с диссектора 1 импульсы видеосигнала, пронормированные усили телем 2, делятся триггером 3 на два и поступают в блок 4 переключения режимов. В режиме.определения координат реверсирование счетчика 5 канала X (канал Y работает аналогично) производится импульсами, жестко связанными с центром крестообразного растра. Таким образом, счетчик 5 слева от центра следящего крестообразного растра суммирует импульсы видеосигна ла, а справа от центра следящего растра вычитает из числа ранее накоп ленных импульсов число поступающих импульсов видеосигнала. Число, остав щееся в счетчике 5 после окончания сканирования по координатам, однозначно характеризует рассогласование центра изображения объекта на фотокатоде диссектора 1 и центра следяще го крестообразного растра. Цифровой фильтр 12 (аналог однозвенного RSфильтра первого порядка) осуществляе фильтрацию кодов координаты. Код с выхода реверсивного счетчика5 через элемент ИЛИ 22 поступает на сумматор 23, суммируется с кодом регист ра 24, записывается в регистр 24 и переписывается в регистр 25 сдвига. Регистр 25 сдвига предназначен для управления постоянной времени цифрового фильтра. Изменение постоянной времени фильтра осуществляется изменением количества разрядов, на которое производится уменьшение (сдвиг) кода в регистре 25. Сдвиг кода управ 2 ляется вычислителем 11 дисперсии ошибки и определяет на какую долю входного кода прирастает выходной код фильтра (на 1/2, 1/4, 1/8 и т.д.) за один шаг. Код с выхода регистра 25 сдвига через инвертор 26 кода и элемент ИЛИ 22 суммируется в дополнительном коде в сумматоре 23 с содержимым регистра 24. В результате содержимое регистра 24 уменьшается на число, хранящееся в регистре 25. Перепись кода из регистра 25 в регистр 6 производится одновременно по .каналам X и Y. Число в ЦАПУ преобразуется в ток, который смещает центр крестообразного растра на фотокатоде диссектора 1 в сторону уменьшения рассогласования . Вычислитель 11 дисперсии ошибки рассогласования вьшолняет функцию . л ., N1-1 . Sj 1 ( где о - оценка дисперсии ошибки рассогласования канала X; N+1 размер выборки, по которой вычисл.яется оценка дисперсии;AXj - величина ошибки рассогласования в i-M периоде следящего растра. Реверсивный счетчик 13 вычисляет в каждом периоде развертки следящего растра величину а X, которая поступает на квадратор 14.. Квадратор 14 выпорнен на программируемой логической матриде (ПЛМ), в которой заложены квадраты всех возможных комбинаций входного кода. Сумма квадратов ошибки рассогласования с помощью сумматора 15 накапливается в регистре 16 сдвига. Счетчик 18 считает количество периодов сканирования следящего растра и с окончанием N+1 периода счетчик запускает первый формирователь 20 импульсов, который формирует K(log N) импульсов сдвига, поступающих на регистр 16. Величина N . выбирается кратной степени числа два в связи с возможностью замены операции деления на N операций сдвига кода на tog.N разрядов. Кроме этого, величина N должна отвечать требованиям теории статистических решений. В рассматриваемом случае N выбиралось большим 250. После сдвига кода в регистре 16 на его выходе . получалась оценка дисперсии ошибки 7 рассогласования, которая поступала на вход преобразователя 17 кода. Пре образователь 17 выполнен на ПЛМ, в которую программируется следующий алгоритм преобразования: например, если входное число преобразователя 17 находится в пределах где L,Lj,Lj, - граничные значения интервалов, в которЬк может находиться оценка дисперсии , то на выходе преобразователя появляется код 0101000......0. В случае, если , то код может быть 01010100. ..0. Если имеем L L то на йыходе преобразователя 17 код 01000000...О, и т.д. Следовательно, в связи с изменением величи.ны оценки дисперсии с количество единиц в выходном коде преобразовате ля 17 соответственно меняется. Код с выхода преобразователя 17 записывается в регистр 18 перед окончанием каждого цикла сканирования следящего растра. По окончанию каждого пе риода сканирования запускается формирователь 21 импульсов, формирующий импульсы сдвига на регистр 18, количество которых равно количеству разрядов регистра 18. В результате на выходе последовательного кода регист ра 18 формируется определенное количество импульсов, поступающих на управляющий вход регистра 25 и 28 сдвигающих код.в нем соответственно описанному, т.е. осуществляется управление полосой пропускания контура автоматического управления. Пример работы фильтра с двумя разными постоянныьш времени иС показан на фиг. 2и (пунктир изображает скачки координаты). Известно, что дисперсия ошибки рассогласования, обусловленная внешними воздействиями, зависит от полосы пропускания контура и интенсивности mvMOB слепующим oбpaзo l где лР - полоса пропускания контУра автоматического управления; Ыд- интенсивность шумовых воздействий . Отсюда следует, что для сохране-ния постоянства дисперсии ошибки э в случае изменения интенсивности N необходимо управлять пшриной полосы пропускания контура. Неучет изменений интенсивности N может приводить к значительнь ошибкам при определении координат световых точечных объ-: ектов. В идеальном случае при изменении NO выигрыш в точности определения координат может достигать 100%. Экспериментально получен выигрьшг в точности 50-55% в сравнении с базовым объектом си .
/S VMVSV-vVSVh yVVV
Ж
цщпдпг
VJ/
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для определения коор-диНАТ ТОчЕчНыХ СВЕТОВыХ Об'ЕКТОВ | 1978 |
|
SU811302A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
