2.Способ измерения подвигания подготовительного забоя, основанный па формировании и счете электрических импульсов, образованных путем взаимодействия чувствительного элемента с конструктивными элементами скребкового конвейера, отличающийся тем, что, с целью повышения оперативности и точности замеров подвигания подготовительного забоя, формируют синхроимпульс путем наведения электрического сигнала от сдвоенного скребка, при появлении которого начинают отсчет времени до появления следующего синхроимпульса, и по длительности интервала следования синхроимпульсов и по скорости движения скребков конвейера определяют его длину, а под- вигание забоя определяют по разности текущего и предыдущего значений длины конвейера.
3.Устройство измерения подвигания подготовительного забоя,содержащее забойный
Изобретение относится к области оперативного измерения подвигания подготовительного забоя и может найти применение в автоматизированных системах управления подготовительными работами на угольных щахтах.
Цель изобретения - повышение оперативности и точности замеров подвигания подготовительного забоя.
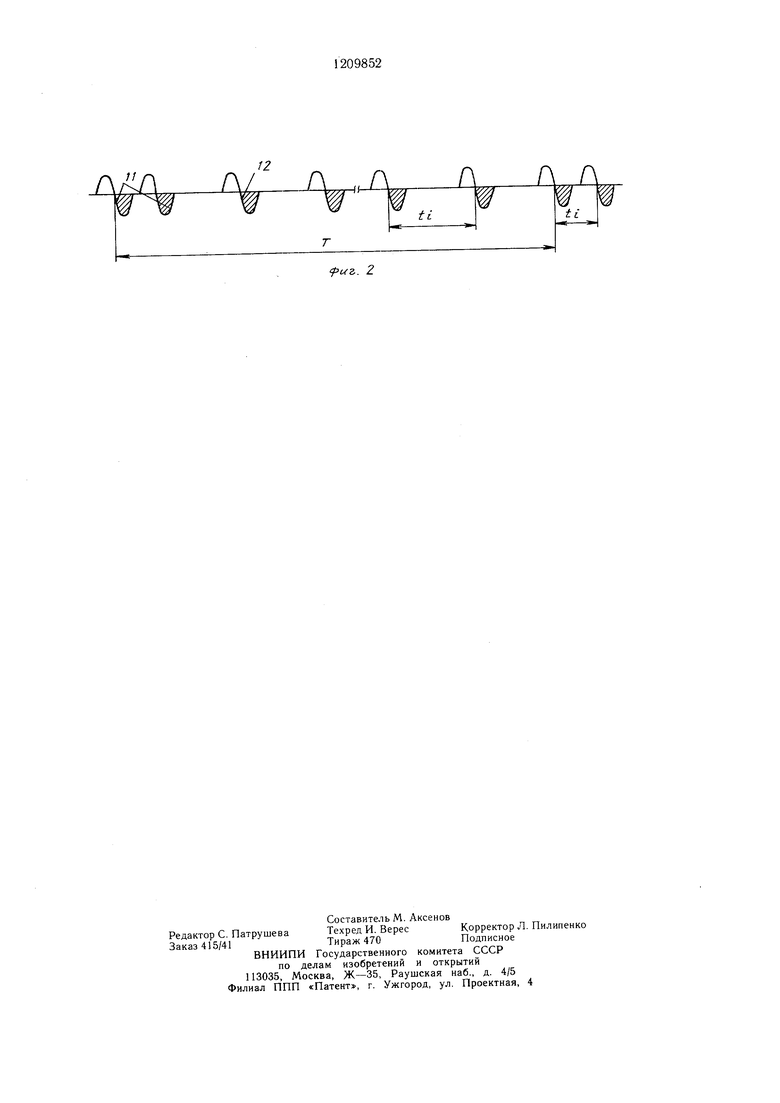
На фиг. 1 представлена схема устройства измерения подвигания подготовительного забоя; на фиг. 2 - диаграмма формирования счетных и синхроимпульсов.
Для выполнения предлагаемого способа по первому варианту формируют счетные и синхроимпульсы.
Счетные импульсы формируют путем наведения электрического сигнала при прохождении щтатных скребков конвейера над чувствительным элементом, установленном на конвейере, и выделения одного полупериода однополупериодным вентилем. Синхроимпульсы формируют аналогично при прохождении над чувствительным элементом установленного на конвейере сдвоенного скребка.
Счетные импульсы и синхроимпульсы поступают в вычислительно-логический блок, в котором считываются импульсы и измеряются интервалы их следования /,-. Если это время меньше времени уставки ty, от синхроимпульса производят счет импульсов от штатных скребков до тех пор, пока сохраняется неравенство ,,.
скребковый конвейер, расположенный на нем чувствительный элемент, например маг- нитоиндукционный датчик, и последовательно соединенные блок телемеханики, счетный блок и блок регистрации, отличающееся тем, что, с целью повышения оперативности и точности замеров подвигания подготовительного забоя, оно дополнительно снабжено датчиком включенного состояния конвейера, однополупериодным выпрямителем и блоком формирования импульсов, причем чувствительный элемент соединен через однополу- периодный выпрямитель с входом блока формирования импульсов, выходы которого подключены к первому и второму входам блока телемеханики, датчик включенного состояния конвейера подключен к третьему входу блока телемеханики, а на конвейере установлен сдвоенный скребок.
Величина уставки oпpeдev яeтcя соотно- щением
lie. ,f . Ьш
V
где /ic - расстояние между сдвоенными
скребками;
/iiii - расстояние между штатными скребками;
V - скорость перемещения скребков.
Подсчет количества импульсов от штатных скребков п, начинают с импульса, следующего за вторым из пары импульсов от сдвоенных скребков (синхроимпульса), и заканчивают с появлением следующего синх- роимпульса. Затем цикл подсчета повторяется.
В процессе проведения горной выработки забойный конвейер наращивают, пропорционально растет количество штатных скребков и в конвейерном ставе. Длину забойного скребкового конвейера LC.K огфеделяют по формуле
/ hi hut
.K -„
(2)
и уточняют по мере поступления данных об п, после каждого цикла появления синхроимпульса.
Подвигапия подготовительного забоя AL определяют по фор.муле
.K./-Lc.K.(/-1),(3)
где LC.K./. и Lc.K.(/-i) - периодически измеряе.мая длина конвейера.
Подвигание выработки и ее общая длина регистрируются блоком регистрации.
Для выполиения предлагаемого способа по второму варианту формируют только синхроимпульс путем наведения электри- ческого сигнала при прохождении сдвоенного скребка над чувствительным элементом, установленном на конвейере, и выделения спаренных однополупериодных сигналов при помощи вентиля. Синхроимпульс по специальному каналу поступает в вычислительно-логический блок, в котором считывается длительность интервала Т следования периодически появляющегося синхроимпульса. По данным о скорости перемещения скребков V и интервалу времени Т рассчитывают длину конвейера
Ь(4)
В случае отключения конвейера по технологическим или аварийным причинам по данным датчика включенного состояния конвейера результат замера длительности интервала следования синхроимпульса в вычцс лительно-логическом блоке обнуляется. В расчет принимается длительность интервала, если между появлением соседних синхроимпульсов конвейер не отключается. Подвигание выработки рассчитывают по формуле (3) и регистрируют блоком регистрации.
Оба варианта способа могут применяться самостоятельно и дополнять друг друга с целью повышения точности замеров.
Устройство, реализующее описанные варианты способа, содержит (фиг. 1) скребковый конвейер , щтатные скребки 2, сдвоенный скребок 3. На конвейере 1 установлен чувствительный элемент 4, например магнитоиндукцион-ный датчик ДМ-2 или ДМ- 2М. На выходе чувствительного элемента 4 установлен однополупериодный выпрямитель 5, выход которого через блок 6 формирования импульсов, блок 7 телемеханики связан с входом счетного блока 8 и блоком 9 регистрации. В пускателе привода конвейера 1 установлен датчик 10 включенного состояния конвейера.
Устройство, реализующее первый вариант способа, работает следующим образом.
При подвигании подготовительного забоя технологически необходимо наращивать забойный скребковый конвейер 1, в результате чего увеличивается количество штатных скребков 2 в конвейерном ставе. При работе конвейера I (погрузка горной массы) каждый скребок 2 и сдвоенный скребок 3, проходя над чувствительным элементом 4,
0
5
5
0
0
Q
наводит в катушке элемента электрический сигнал, имеющий примерно синусоидальную форму. Однополупериодный выпрямитель 5 преобразует эти сигналы в импульсные (импульсы 11 и 12 на фиг. 2), которые через блок 6 формирования импульсов поступают в блок 7 телемеханики и затем на вход счетного блока 8, в котором импульсы считываются и по их результату рассчитывается длина конвейера и подвигание забоя методом, изложенным при описании первого варианта способа. Регистрация подвига- ния забоя осуществляется блоком 9 регистрации.
Устройство, реализующее второй вариант способа, работает следующим образом.
При подвигании подготовительного забоя технологически необходимо наращивать забойный скребковый конвейер, в результате чего увеличивается длина цепи конвейера, на которой установлены штатные скребки 2 и сдвоенный скребок 3. При работе конвейера 1 (погрузка горной массы) каждый штатный скребок 2 и сдвоенный скребок 3, проходя над чувствительным элементом 4, наводят в его катушке электрический сигнал, имеющий примерно синусоидальную форму. Однополупериодный выпрямитель 5 преобразует эти сигналы в импульсы (импульсы 11 и 12 на фиг. 2). Эти сигналы поступают на вход блока 6 формирования импульсов, на вы.ходе которого формируются только син.ч- роимпу;1ьсы, которые через блок 7 телемеханики поступают на вход счетного блока 8, на вход которого через блок 7 телемеханики также поступает сигнал от датчика включенного состояния конвейера 10. В блоке 8 определяется длительность интервала следования периодически появляющихся синхрои.м- пульсов и по времени этого интервала и скорости перемещения скребков определяют длину конвейера и скорость подвигания подготовительного забоя по формулам (4) и (3). Регистрация подвигания забоя осуществляется блоком 9. Чтобы исключить ошибки при аварийных режимах и остановках конвейера по другим причинам, по сигналу датчика 10 результат замера длительности интервала следования синхроимпульса в счетном 6jJOKe 8 обнуляется, а в расчет принимается интервал времени между соседними импульсами при постоянно включенном конвейере.
Использование пред.чагаемого изобретения в автоматизированной системе управления подготовительными работа.ми на шахте позволяет повысить эффективность измерения подвигания подготовительного забоя.
1. Способ из.мерения подвигания подготовительного забоя,основанный на формировании и счете электрических импульсов, образованных путем взаимодействия чувствительного элемента с конструктивными элементами скребкового конвейера, отличающийся тем, что, с целью повышения оперативности и точности замеров подвигания подготовительного забоя, формируют синхроимпульс путем наведения электрического сигнала от сдвоенного скребка, при появлении которого начинают отсчет электрических импульсов, которые формируются штатными скребками конвейера до появления следую- ш,его синхроимпульса, по количеству счетных импульсов и расстоянию между скребками определяют длину конвейера, а подви- гание забоя определяют по разности текущего и предыдущего значений длины конвейера. а (Л to о со 00 О1 ю
| Устройство для определения пути подвигания фронта очистного забоя в шахте | 1980 |
|
SU933993A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| СПОСОБ ДИСТАНЦИОННОГО КОНТРОЛЯ МЕСТОНАХОЖДЕНИЯ ВЫЕМОЧНОЙ МАШИНЫ | 0 |
|
SU192726A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| ДАТЧИК МЕСТОНАХОЖДЕНИЯ ОБЪЕКТА | 0 |
|
SU309131A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
